 2014-01-25
2014-01-25 7421
7421Лекция № 15
Дифференциальные уравнения являются основой огромного количества расчетных задач из самых различных областей науки и техники.
В MathCAD нет средств символьного (точного) решения дифференциальных уравнений, но достаточно хорошо представлены численные методы их решения.
Дифференциальные уравнения – это уравнения, в которых неизвестные являются не переменные (т.е. числа), а функции одной или нескольких переменных. Эти уравнения (или системы) включают соотношения между искомыми функциями и их производными. Если в уравнения входят производные только по одной переменной, то они называются обыкновенными дифференциальными уравнениями (ОДУ). В противном случае говорят об уравнениях в частных производных. Таким образом, решить (иногда говорят проинтегрировать) дифференциальное уравнение – значит, определить неизвестную функцию на определенном интервале изменения ее переменных.
Как известно, одно обыкновенное дифференциальное уравнение или система ОДУ имеет единственное решение, если помимо уравнения определенным образом заданы начальные или граничные условия. Имеется два типа задач, для которых возможно численное решение ОДУ с помощью MathCAD:
- задачи Коши, для которых определены начальные условия на искомые функции, т.е. заданы значения этих функций в начальной точке интервала интегрирования уравнения;
- краевые задачи, для которых заданы определенные соотношения сразу на обеих границах интервала.
Из дифференциальных уравнений в частных производных есть возможность решать только уравнения с двумя независимыми переменными: одномерные параболические и гиперболические уравнения, такие как уравнения теплопроводности, диффузии, волновые уравнения, а также двухмерные эллиптические уравнения (уравнения Пуассона и Лапласа).
В MathCAD нет универсальной функции для решения дифференциальных уравнений, а есть около двадцати функций для различных видов уравнений, дополнительных условий и методов решения. Эти функции можно найти в библиотеке Insert/Function, категория “Differential Equation Solving (решение дифференциальных уравнений).
Решение Обыкновенных Дифференциальных Уравнений (ОДУ)
ОДУ первого порядка.
ОДУ первого порядка называется уравнение
F(x,y,y’)=0
F – известная функция трех переменных;
x – независимая переменная на интервале интегрирования[a,b];
y – неизвестная функция;
y’ – ее производная.
Функция y(x) является решением дифференциального уравнения, если она при всех xÎ[a,b] удовлетворяет уравнению
F(x,y(x),y’(x))=0
График решения y(x) называется интегральной кривой дифференциального уравнения. Если не заданы начальные условия, таких решений y(x) будет множество. При известных начальных условиях y(x0)= y0 решение y(x) будет единственным.
Вычислительный процессор MathCAD может работать только с нормальной формой ОДУ. Нормальная форма ОДУ – это ОДУ, разрешенное относительно производной
y’=f(x,y)
ОДУ высших порядков.
Обыкновенным дифференциальным уравнением n-го порядка называется уравнение вида
F(x,y,y’,y’’, …,y(n))=0
F – известная функция n+2 переменных;
x – независимая переменная на интервале интегрирования[a,b];
y – неизвестная функция;
n – порядок уравнения.
Функция y(x) является решением дифференциального уравнения, если она при всех xÎ[a,b] удовлетворяет уравнению
F(x, y(x), y’(x), y’’(x),…, y(n)(x))=0
Нормальная форма ОДУ высшего порядка имеет вид
Y(n) =f(x, y, y’, …, y(n-1))
Если не заданы начальные условия, то дифференциальное уравнение n – го порядка имеет бесконечное множество решений, при задании начальных условий y(x0)= y0, y’(x0)= y0,1, y’’(x0)= y0,2, …, y(n-1)(x0)= y0,n-1 решение становится единственным (задача Коши).
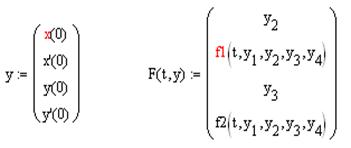
Задача Коши для дифференциального уравнения n – го порядка может быть сведена к задаче Коши для нормальной системы n дифференциальных уравнений 1 го порядка, которая в векторной форме имеет вид
Y’ = F(x, Y), Y(x0) = Y0
Y(x0) = Y0 – вектор начальных условий;
| |
Y’=(y’1, y’2, …, y’n) – вектор первых производных;
F(x, Y) = (y2, y3, …, yn, f(x,y1, …, yn) – вектор правых частей;
Y = (y2, y3, …, yn) – вектор искомого решения.
Эта система получается в результате следующей замены:
|
| ||||
| |
 ,где
,где 
Для численного интегрирования ОДУ в MathCAD имеется выбор – либо использовать вычислительный блок Given/Odesolve, либо встроенные функции. Оба способа обладают одинаковыми возможностями, но при использовании блока решения запись уравнений более привычна и наглядна, однако отдельная функция может быть использована в составе других функций и программ. Рассмотрим оба варианта решения.
Вычислительный блок Given/Odesolve
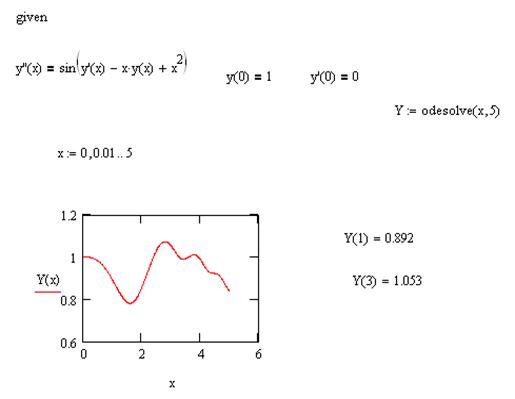
Н иже приведены два примера для решения дифференциальных уравнений первого и второго порядка с использованием вычислительного блока решения Given/Odesolve.
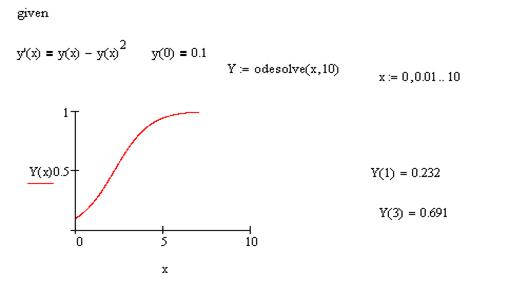
Вычислительный блок для решения одного ОДУ состоит из трех частей:
- ключевое слово given;
- ОДУ и начальные условия, записанные с помощью логического равенства;
- встроенная функция Odesolve(x, b) относительно независимой переменной x на интервале [a, b]; b – верхняя граница отрезка интегрирования. Допустимо и даже предпочтительнее задание функции Odesolve(a, b, step) с тремя параметрами, где step – внутренний параметр численного метода, определяющий количество шагов; чем больше step, тем с лучшей точностью будет получен результат, но тем больше времени будет затрачено на его поиск.
Функция Odesolve возвращает решение задачи в виде функции. Эта функция не имеет символьного представления и может только вернуть численное значение решения уравнения в любой точке интервала интегрирования.
Функция Odesolve использует для решения дифференциальных уравнений наиболее популярный алгоритм Рунге-Кутта четвертого порядка, описанный в большинстве книг по методам вычислений. Он обеспечивает малую погрешность для широкого класса систем ОДУ за исключением жестких систем. Если щелчком правой кнопки мыши на блоке формул с функцией Odesolve вызвать контекстное меню, то можно изменить метод вычисления решения, выбрав один из трех вариантов: Fixed – метод Рунге-Кутта с фиксированным шагом интегрирования (этот метод используется по умолчанию), Adaptive – также метод Рунге-Кутта, но с переменным шагом, изменяемым в зависимости от скорости изменения функции решения, Stiff – метод, адаптированный для решения жестких уравнений и систем (используется так называемый метод PADAUS).
Альтернативный метод решения ОДУ заключается в использовании одной из встроенных функций: rkfixed, Rkadapt, или Bulstoer. Все они решают задачу Коши для системы дифференциальных уравнений первого порядка, но каждая из них использует для этого свой метод. Для простых систем не играет большой роли, какой метод использовать – все равно получите решение достаточно быстро и с высокой точностью. Но для сложных или специфических систем бывает, что некоторые методы вообще не могут дать удовлетворительного решения за приемлемое время. Именно для таких сложных, но не редких случаев в MathCAD и введено несколько различных методов решения систем ДУ.
- rkfixed – метод Рунге-Кутта с фиксированным шагом интегрирования. Самый простой и быстрый метод, но далеко не всегда самый точный. Полностью аналогичен использованию функции Odesolve с выбранным в контекстном меню методом Fixed.
- Rkadapt – метод Рунге-Кутта с переменным шагом интегрирования. Величина шага адаптируется к скорости изменения функции решения. Данный метод позволяет эффективно находить решения уравнений, в случае если оно содержит как плавные, так и быстро меняющиеся участки. Там, где решение меняется слабо, шаги выбираются более редкими, а в областях его сильных изменений – частыми. В результате для достижения одинаковой точности требуется меньшее число шагов, чем для rkfixed. Полностью аналогичен использованию функции Odesolve с выбранным в контекстном меню методом Adaptive.
- Bulstoer – метод Булирша-Штера. Этот метод более эффективен, чем метод Рунге-Кутта, в случае если решение является плавной функцией.
Имена функций Rkadapt и Bulstoer начинаются с прописной буквы. В MathCAD для некоторых имен функций неважно, с какой буквы они записаны, но для перечисленных функций это принципиально, т.к. в MathCAD также существуют функции с такими же именами, только записанные с маленькой буквы – rkadap, bulstoer. Эти функции используются в тех случаях, когда важным является решение задачи в конечной точке интервала интегрирования.
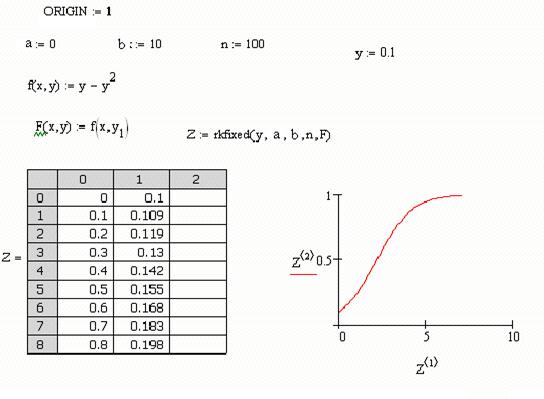
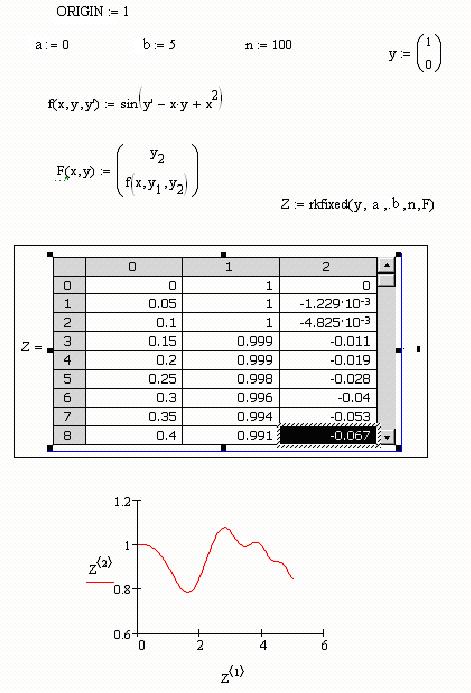
Выше приведены примеры решения тех же дифференциальных уравнений первого и второго порядка, которые были решены с использованием вычислительного блока Given/Odesolve.
Применение встроенных функций в документах MathCAD выглядит сходным образом, т.е. функции Rkadapt и Bulstoer имеют тот же синтаксис, что и выше приведенная функция rkfixed. Назначение аргументов в этих встроенных функциях следующее:
- y – вектор начальных значений неизвестных функций, входящих в систему. В случае одного уравнения и одной неизвестной функции – это просто число.
- а – начало отрезка, на котором ищется решение системы (отрезка интегрирования). Именно в этой точке значения неизвестных функций принимаются равными элементам вектора y.
- b – конец отрезка интегрирования.
- n – количество частей, на которые разбивается отрезок [a, b] при решении системы. Чем больше это число, тем точнее получается решение, но расчет занимает больше времени.
- F(x,y) – векторная функция, элементы которой содержат правые части уравнений системы в нормальной форме (когда левые части – первые производные от соответствующих функций, а в правых частях производные отсутствуют). Аргументами этой функции являются вектор y, элементы которого соответствуют различным неизвестным функциям системы, и скалярный аргумент x, соответствующий независимой переменной в системе. В случае одного уравнения функция F может быть скалярной функцией, зависящей от двух скалярных переменных x и y.
Возвращаемым значением всех вышеперечисленных встроенных функций является матрица. Первый столбец этой матрицы – это точки, на которые разбивается отрезок [a, b], а остальные столбцы – это значения функций системы в этих точках. Если в аргументе функции rkfixed было указано количество частей n = 100, то матрица будет содержать 101 строку вместе с начальной.
Решение систем обыкновенных дифференциальных уравнений.
Для численного интегрирования систем ОДУ в MathCAD также имеется выбор – либо использовать вычислительный блок Given/Odesolve, либо встроенные функции rkfixed, Rkadapt и Bulstoer.
При решении систем ОДУ MathCAD требует, чтобы система ОДУ была представлена в нормальной форме (когда левые части – первые производные от соответствующих функций, а в правых частях производные отсутствуют):
где Y и Y’ – соответствующие неизвестные векторные функции переменной t, а F – вектор правых частей системы уравнений первого порядка. Именно векторное представление используется для ввода системы ОДУ в среде MathCAD.
Если в систему ОДУ входят и уравнения высших порядков, то оно тоже сводится к системе уравнений первого порядка, как было показано выше. При этом количество нулевых условий для вычислительного блока Given/Odesolve, а также размер вектора начальных условий y и размер вектора правых частей F(x,y) для встроенных функций rkfixed, Rkadapt и Bulstoer должны быть равны сумме порядков всех уравнений.
Вначале покажем решение систем ОДУ первого порядка с использованием вычислительного блока Given/Odesolve
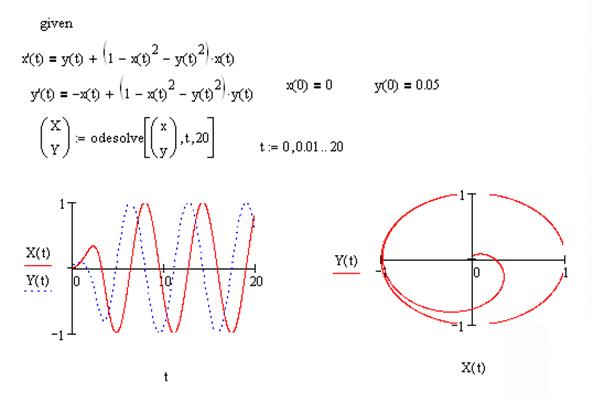
Функция Odesolve для системы ОДУ имеет несколько иной, по сравнению с одним уравнением, синтаксис. Теперь она возвращает вектор функций, составляющих решение системы. Поэтому в качестве первого аргумента функции нужно ввести вектор, состоящий из имен функций, использованных при вводе системы. Второй и третий аргументы то же самое, что и в задаче с одним ОДУ.
Решение системы ОДУ показано на графике слева. Как известно, решения ОДУ часто удобнее изображать не в таком виде, а в фазовом пространстве, по каждой из осей которого откладываются значения каждой из найденных функций (как показано на рисунке справа). При этом аргумент входит в них лишь параметрически. В рассматриваемом случае двух ОДУ такой график – фазовый портрет системы – является кривой на фазовой плоскости. В общем случае, если система состоит из N ОДУ, то фазовое пространство является N – мерным. При N > 3 наглядность теряется, и для визуализации фазового портрета приходится строить его различные проекции.
Рассмотрим решение этой же системы ОДУ первого порядка с использованием встроенной функции rkfixed.
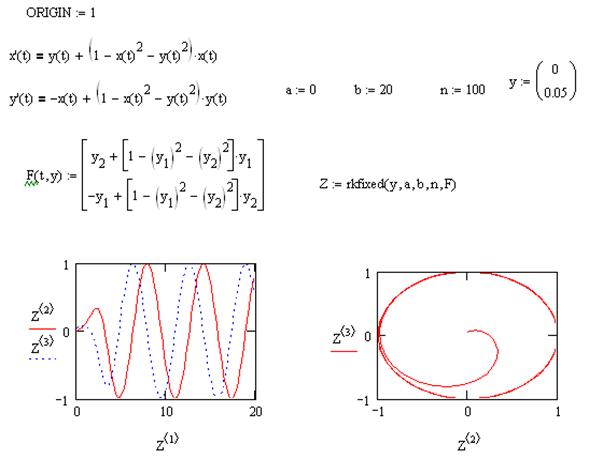
Полученное решение полностью соответствует вышеприведенному решению с использованием вычислительного блока Given/Odesolve. Следует отметить, что начальные условия здесь задаются в виде вектора y, а функциям x(t) и y(t) соответствуют элементы этого вектора y1 и y2. Вектор начальных условий y и вектор правых частей F имеют размер равный двум, т.к. система состоит из двух уравнений первого порядка. Для системы ОДУ, состоящей из двух уравнений второго порядка, размер этих векторов будет равен четырем
Решение жестких ОДУ и систем ОДУ.
Сложно дать математически точное определение жесткости, поскольку задачи, входящие в этот класс, весьма разнообразны. Чаще всего жесткими дифференциальными уравнениями называются уравнения, в решении которых есть плавно меняющаяся компонента, а также быстро затухающие возмущения.
Для жестких систем (stiff) не работает обычный метод Рунге-Кутта или Булирша-Штера. Наличие быстро затухающего возмущения приводит к тому, что эти численные методы дают расходящееся решение. Для жестких задач разрабатываются специальные методы. В MathCAD предусмотрены три различные функции для решения жестких задач:
- Radau – метод Radaus для жестких систем. Полностью аналогичен использованию функции odesolve с выбранным в контекстном меню методом Stiff.
- Stiffb – метод Булирша-Штера, адаптированный для жестких систем.
- Stiffr – метод Розенброка.
Краевые задачи для ОДУ
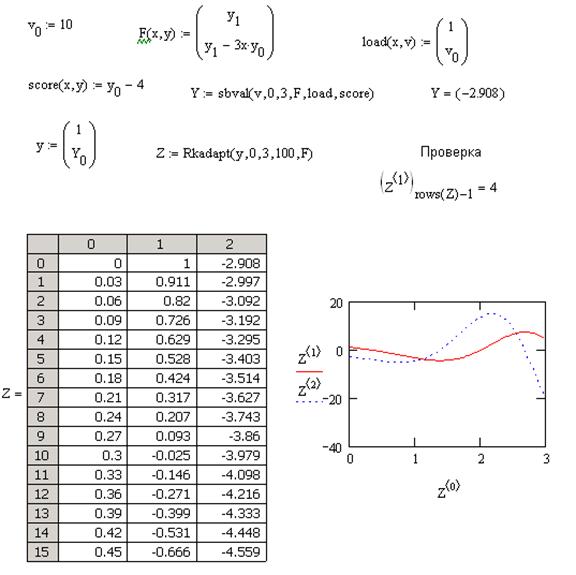
Постановка краевых задач для ОДУ отличается от задач Коши, рассмотренных выше, тем, что граничные условия для них ставятся не в одной начальной точке, а на обеих границах расчетного интервала. Если имеется система N ОДУ первого порядка, то часть из N условий может быть поставлена на одной границе интервала, а оставшиеся условия – на противоположной границе. В связи с тем, что условия поставлены не на одной, а на обеих границах интервала, краевые задачи нельзя решить изложенными выше методами, предназначенными для задач Коши. Для решения краевой задачи в MathCAD нет отдельной функции. Однако есть функции, позволяющие превратить краевую задачу в задачу Коши. Эти функции «угадывают» недостающие начальные условия, исходя из того, что решение должно удовлетворять заданным условиям в конечной точке интервала интегрирования. Простейшей из функций, предназначенных для приведения краевой задачи к задаче Коши, является функция sbval.
Для того, чтобы решить двухточечную краевую задачу с помощью этой функции, следует выполнить следующие действия:
- Задайте вектор v с количеством элементов равным количеству недостающих начальных условий. Значения элементов этого вектора – это начальные приближения, исходя из которых будет происходить поиск недостающих начальных условий. На данном этапе не конкретизируется, какой из элементов вектора будет соответствовать начальному значению той или иной неизвестной функции в задаче.
- Задайте функцию F (x,y). Эта функция уже описывалась выше. Она представляет собой вектор, каждый элемент которого – это правая часть одного из уравнений системы.
- Задайте еще одну векторную функцию load (x,v). Это функция от скалярного аргумента x и вектора v, который имеет столько же компонент, сколько недостающих начальных условий в системе. Сам вектор load должен содержать такое же количество элементов, как и вектор F, т.е. столько, сколько должно быть начальных условий в задаче. Если начальное значение какой-либо из функций известно, то соответствующий элемент вектора load должен содержать это значение. Для функций, начальное значение которых неизвестно, соответствующий элемент вектора load должен содержать один из элементов вектора v.
- Следует задать еще одну некоторую функцию score (x,y). Аргументы этой функции – скаляр x и вектор y, который имеет столько элементов, сколько уравнений в системе. Количество компонент вектора score должно равняться количеству граничных условий, заданных в конечной точке отрезка интегрирования. На самом деле каждая компонента этого вектора задает одно из граничных условий в конечной точке. Например, если в задаче есть граничной условие yi(b)=c, то один из элементов вектора score должен быть функцией, которая обращается в нуль при значениях x=b и y(b)=c. Конкретный вид этой функции не играет особой роли, поэтому проще всего задавать ее в таком виде: scorek(x,y):=yi-c. Таким же образом должны быть заданы все элементы вектора score для всех конечных условий задачи.
- Теперь все введенные величины нужно использовать как аргументы в функции sbval. Использование этой функции выглядит следующим образом: Y:=sbval(v,a,b,F,load,score). Аргументы a и b – это начало и конец отрезка интегрирования.
- Результатом функции sbval будет вектор, содержащий недостающие начальные значения. Их последовательность задается той последовательностью, в которой были использованы компоненты вектора v в функции load.
- Постройте вектор начальных значений, используя известные начальные значения, а также элементы вектора Y, там где значения были неизвестны.
- Теперь можно решить полученную задачу как задачу Коши, с помощью, например, функции Rkadapt.
Ниже приведено решение дифференциального уравнения  на отрезке [0,3] с начальным условием y(0)=1 и граничным условием y(3)=4. Недостающее начальное условие – y’(0).
на отрезке [0,3] с начальным условием y(0)=1 и граничным условием y(3)=4. Недостающее начальное условие – y’(0).
Решение уравнений в частных производных.
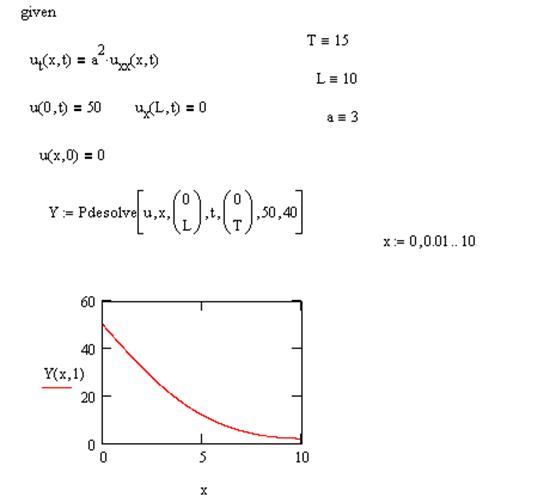
Постановка задач для уравнений в частных производных включает определение самого уравнения (или системы нескольких уравнений), а также необходимого количества краевых условий (число и характер которых зависит от специфики уравнения). Согласно своему названию, уравнения должны содержать частные производные неизвестной функции u (или нескольких функций, если уравнений несколько) по различным аргументам, например, пространственной переменной x и времени t. Соответственно, для решения задачи требуется вычислить функцию нескольких переменных, например, u(x,t) в некоторой области определения аргументов 0 £ x £ L и 0£ t £ T. Граничные условия определяются как заданные временные зависимости функции u, или производных этой функции, на границах расчетной области 0 и L, а начальные – как заданная функция u(x,0).
Сами уравнения в частных производных (несколько условно) можно разделить на три основных типа:
- параболические – содержащие первую производную по одной переменной и вторую – по другой, причем все эти производные входят в уравнение с одинаковым знаком;
- гиперболические – содержащие первую производную по одной переменной и вторую – по другой, входящие в уравнения с разными знаками;
- эллиптические – содержащие только вторые производные, причем одного знака.
Средства MathCAD позволяют решать одномерные параболические и гиперболические уравнения (с одной пространственной и одной временной переменной), а также двумерное уравнение Пуассона. Такой, казалось бы, узкий круг решаемых задач на самом деле охватывает подавляющее большинство задач, возникающих в физике и технике.
Дифференциальные уравнения параболического типа.
Для решения дифференциальных уравнений в частных производных параболического типа можно построить группу решения с функцией pdesolve. Такая группа решения состоит из следующих элементов.
- Ключевое слово given
- Уравнение, которое нужно решить. Уравнение должно иметь такой вид:
 . Для ввода производных в данном случае нельзя пользоваться обычным оператором производной, а нужно пользоваться нижним индексом, как это обычно делается в литературе для записи уравнений в частных производных. При этом нижний индекс набирается не как числовой, а как буквенный (точка).
. Для ввода производных в данном случае нельзя пользоваться обычным оператором производной, а нужно пользоваться нижним индексом, как это обычно делается в литературе для записи уравнений в частных производных. При этом нижний индекс набирается не как числовой, а как буквенный (точка). - Граничные условия для функции u(x,t). Если уравнение второго порядка по x, то граничных условий должно быть два. Можно использовать как граничные условия Дирихле (u(x0,t) = w(t)), так и граничные условия Неймана (ux(x0,t) = w(t)) или их комбинацию, как в вышеприведенном примере.
- Начальное значение для неизвестной функции – u(x,0).
- функция pdsolve(u,x,xrange,t,trange,xpts,tpts). Ее аргументы имеют следующее назначение
- u – имя функции, относительно которой решается уравнение. Для системы уравнений здесь должен быть вектор имен функций (как в odesolve).
- X- имя пространственной переменной.
- Xrange – двухкомпонентный вектор, задающий начало и конец интервала изменения пространственной переменной.
- T – имя временной переменно й. Основная разница между пространственной и временной переменными в данном случае – это то, что все уравнения могут содержать только первые производные по временной переменной.
- Trange – еще один двухкомпонентный вектор. Этот вектор задает начало и конец временного интервала, на котором решается задача.
- Xpts, tpts – количество точек, разбивающих для интегрирования пространственный и временной интервалы соответственно. Эти два параметра можно не указывать, тогда количество точек будет выбрано автоматически из соображений достаточной точности. Рекомендуется задавать эти параметры во всех задачах, кроме простых, поскольку во многих случаях высокая точность вычислений теряет смысл из-за погрешности, вносимой самим методом.
Выше приведен пример решения одномерной задачи теплопроводности для одного бруска, один конец которого теплоизолирован, а ругой поддерживается при определенной температуре
Дифференциальные уравнения гиперболического типа.
Функция pdsolve также позволяет решать системы ДУ в частных производных первого порядка по времени. Такая возможность может быть использована для решения задач с ДУ гиперболического типа. Ведь поскольку уравнения гиперболического типа содержат вторую производную по времени, то они не могут быть напрямую введены для решения функцией pdsolve. ДУ гиперболического типа должно быть приведено к системе из двух уравнений первого порядка по времени (как это делалось ранее для обычных ДУ высоких порядков). А далее полученная задача может быть решена с помощью функции pdsolve как система уравнений.
Помимо вычислительного блока given/pdsolve, для решения параболических и гиперболических уравнений можно использовать встроенную функцию numol.
Эллиптические уравнения.
Решение эллиптических уравнений в частных производных реализовано только для единственного типа задач – двумерного уравнения Пуассона. Это уравнение содержит вторые производные функции u(x,y) по двум пространственным переменным. Для его решения в MathCAD есть отдельные встроенные функции multigrid и relax.
Вопросы
- Какие дифференциальные уравнения называются ОДУ первого порядка? Высшего порядка? Что такое нормальная форма ОДУ первого и высшего порядка? К чему сводятся ОДУ высшего порядка при решении?
- Можно ли решить дифференциальные уравнения в MathCADе символьно?
- Как решаются ОДУ с помощью вычислительного блока Given/Odesolve? Какой метод решения реализует функция Odesolve? Как можно изменить метод решения для этой функции?
- Как решаются ОДУ с помощью встроенной функции rkfixed? Чем функция rkfixed отличается от функции Rkadapt?
- Как осуществляется решение системы ОДУ с помощью вычислительного блока Given/Odesolve? Приведите примеры.
- Как осуществляется решение системы ОДУ с помощью функции rkfixed? Приведите примеры.

