 2020-01-14
2020-01-14 143
143IV. Кинетостатический расчёт механизмов графоаналитическим методом
Под термином «силовой расчёт механизма» понимают решение задач об определении усилий, действующих на звенья, давлений в кинематических парах, давлений на раму и фундамент машины, а также задач о нахождении уравновешивающей силы или уравновешивающего момента.
Знать усилия, действующие на звенья, необходимо для того, чтобы задать их размеры, обеспечивающие как прочность, так и достаточную жёсткость, благодаря чему звенья не будут разрушаться, а неизбежные их деформации не выдут за пределы, допустимые условиями работы машины.
Определение давлений позволяет найти силы трения, возникающие при относительном движении звеньев, образующих кинематическую пару. Результаты расчёта используются при оценке энергетических потерь на трение и разработке способов снижения этих потерь (путём отвода теплоты, создания устойчивого смазочного слоя и пр.).
Силы воздействия на раму и фундамент машины надо знать для того, чтобы расчётом обеспечить прочность и надёжность крепления машины к раме, а последней к фундаменту. Кроме того, указанные силы необходимы для расчёта фундамента.
Решение всех этих задач связано с определением реакций связей, которые вызываются не только системой задаваемых сил, но и динамическим влиянием движущихся звеньев машины, т.е. силами инерции.
Во многих современных машинах динамическое влияние движущихся звеньев на величину реакций связей имеет определяющее значение. Можно выделить два характерных типа машин: машины, в которых динамическое влияние преобладает над задаваемыми силами вследствие высоких скоростей движения; машины, чаще технологические, для которых задаваемые силы не могут служить основанием для нахождения размеров звеньев, и эти размеры определяются по динамическим силам и реакциям. При расчёте реакций в кинематических парах с учётом влияния движущихся звеньев считают движение ведущего звена машины известным.
Cилы, действующие на звенья механизма
Силовой расчет дает возможность по заданным весам звеньев, силам инерции, силам сопротивления определять реакции в кинематических парах и движущие силы, необходимые для определения сил полезного сопротивления.
Определение движущей силы позволяет, предварительно оценив потери на трение, решить вопрос о потребной мощности двигателя для привода механизма.
Движущие силы направлены в сторону перемещения их точек приложения или составляют с этими перемещениями острые углы. Движущие силы приложены к ведущим звеньям механизма и совершают положительную работу.
Силы сопротивления направлены против перемещения их точек приложения или составляют с этими перемещениями тупые углы. Силы сопротивления совершают отрицательную работу и подразделяются на производственные силы сопротивления и силы трения.
Силы производственных сопротивлений, для преодоления которых создан механизм, приложены к исполнительным звеньям.
Силы трения (качения, скольжения) возникают в кинематических парах. Часто в курсовых проектах силами трения пренебрегают.
Силы тяжести звеньев приложены в центре масс звена и могут совершать как положительную, так и отрицательную работы или не совершать никакой (если центр масс звена не перемещается или остается на одном горизонтальном уровне).
Задачи силового расчёта
В задачу силового расчета входит определение всех сил и моментов сил, приложенных к каждому звену механизма, включая реакции в кинематических парах. Эти усилия необходимо знать для расчета звеньев и элементов кинематических пар на прочность. Перед началом расчета должны быть решены задачи кинематики: о положениях, скоростях и ускорениях. Если при расчете в число известных внешних сил не включена инерционная нагрузка на звенья, то такой расчет называют статическим. Если силы инерции и их моменты учитываются, то расчет является кинетостатическим.
4.3. Условия, налагаемые структурой механизмов
на определение усилий в кинематических парах
Было установлено, что кинематическая цепь любого стержневого механизма с одной степенью подвижности может быть получена путём присоединения к механизму первого класса структурных групп. Характерное свойство любой из групп – равная нулю подвижность при присоединении к звеньям кинематической цепи. Это значит, что присоединяя структурные группы к механизму первого класса, получаем новую систему, подвижность которой равна подвижности исходной. В присоединённой группе число степеней свободы равно числу условий связи. Если обозначить число звеньев группы через n, а число пар пятого класса, образовавшихся при присоединении, через p 5, то число степеней свободы будет равно 3 n, а число условий связей, налагаемых парами пятого класса, – 2 p 5, вышесказанное можно записать формулой
3 n = 2 p 5.
Это и есть условие образования структурных групп, простейшая из которых содержит два звена и три кинематические пары пятого класса. Данному равенству можно дать и другое толкование. Число три есть число уравнений статики для одного звена, а два – число независимых параметров в одной кинематической паре. Если в формулу
3 n = 2 p 5
подставить значения n и p и она примет вид равенства, то такая система называется статически определимой.
Следовательно, структурная группа может быть принята за расчётную единицу при определении условий в кинематических парах пятого класса.
Применим записанные выше условия к структурной группе второго класса первого вида. Группа состоит из двух звеньев (поводков) и может быть присоединена к двум звеньям, при этом образуются две пары пятого класса (рис. 4.1).
В реальных условиях звенья группы присоединяются не к стойке, а к подвижным звеньям, следовательно, образуется подвижная система, степень свободы которой равна двум. Это значит, что для системы из двух звеньев надо записывать четыре уравнения статики. Если связать
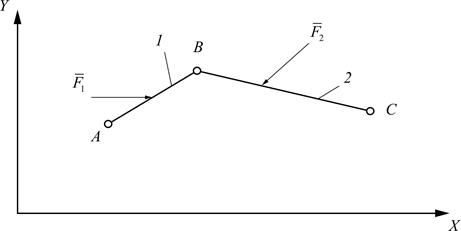
Рис. 4.1. Подвижная схема из двух звеньев
движение звеньев 1 и 2 (см. рис. 4.1) с системой координат X–Y, то можно записать два уравнения проекций сил на оси координат и два уравнения моментов относительно точки B.
В сумме это даёт четыре уравнения статики. Количество неизвестных также должно быть равным четырём. Примем следующие допущения:
а) для вращательной пары:
– вектор реакции проходит через центр пары, следовательно, известна точка приложения силы;
– величина реакции неизвестна;
– линия действия реакции неизвестна.
б) для поступательной пары:
– точка приложения вектора реакции неизвестна;
– величина реакции неизвестна;
– линия действия нормальна к опорной поверхности.
С учётом сказанного количество неизвестных параметров в кинематических парах A и C будет равно четырём.
Таким образом, количество уравнений позволяет определить количество неизвестных сил.
На рис. 4.2 приведена расчётная схема для структурной группы второго класса первого рода.
К звеньям группы приложена система внешних сил, которую образуют силы веса и силы инерции. Направление реакции в шарнирах A и C неизвестно, поэтому полные реакции условно разложены по двум направлениям. Одно совпадает с осью звена, второе перпендикулярно ему. Реакцию, линия действия которой совпадает с осью звена, назовём нормальной Rn, а перпендикулярную ей реакцию – тангенциальной Rt.
Для того чтобы различать реакции по направлению взаимодействия, будем

Рис. 4.2. Расчётная схема для структурной группы
второго класса первого вида
присваивать им индексы, составленные из номеров звеньев. Первым ставим номер звена, от которого отделено звено группы, вторым – номер отдельного звена (см. рис. 4.2) группы.
Под действием всех приложенных сил группа (кинематическая цепь, имеющая нулевую подвижность) находится в состоянии статического равновесия. Следует отметить, что силовой расчёт для каждого вида групп второго класса имеет свои особенности, определяемые видом пар, которые образуют звенья группы.
В заключении рассмотрим расчётную схему механизма первого класса. Механизм первого класса представляет собой соединение двух звеньев, одно из которых неподвижно, т.е. является стойкой. На рис. 4.3 представлены две схемы механизмов первого класса: кривошипного (см. рис. 4.3, а) и ползунного (см. рис. 4.3, б).
Для обоих схем условие статической определимости не выполняется. Получить уравновешенные системы можно, если приложить к ведущим звеньям силу, которая будет уравновешивать все приложенные к звену силы. Эту силу называют уравновешивающей (Fy). Для этой силы должны быть заданы точка приложения и линия действия.

Рис. 4.3. Механизмы первого класса: а – кривошипный; б – ползунный
Предполагаем, что скорости кривошипа и ползуна постоянны. Если скорости переменны, то на эти звенья действуют сила инерции и момент от сил инерции.








