 2020-01-14
2020-01-14 241
241Условия равновесия структурной группы могут быть записаны в форме векторного уравнения. Согласно рис. 4.2 будем иметь

или
 .
.
Вычислив тангенциальные составляющие и определив их направления, приведём систему сил к двум неизвестным по величине силам Rn 1–2
и Rn 0–3. Эти силы могут быть теперь найдены путём построения плана сил по записанному векторному уравнению.
4.5. Порядок силового расчёта механизма
графоаналитическим методом
1. Определяются все внешние силы, действующие на звенья механизма и строится расчётная схема для всего механизма.
2. Выделяются структурные группы, для каждой из них строится расчётная схема.
Начинают силовой расчёт обычно с последней по отношению к механизму первого класса структурной группы, для которой имеется достаточно данных, чтобы построить план сил. Далее последовательно переходят к расчёту следующих структурных групп.
3. Заканчивается силовой расчёт определением сил, действующих на ведущее звено.
4. Рассчитывается мощность, развиваемая уравновешивающим моментом в рассматриваемом положении механизма.
4. Определяется полная мощность с учётом КПД механизма. Силовой расчёт, выполненный для одного положения механизма, не даёт полной картины изменения сил, действующих на звенья механизма, поэтому его следует выполнять для нескольких положений механизма. В этом случае можно будет рассчитать среднюю мощность, развиваемую движущей силой на валу ведущего звена, определить в кинематических парах места подвода смазки, чтобы снизить потери энергии на трение, уменьшить износ трущихся поверхностей и т.д.
4.6. Определение уравновешивающей силы
методом Н.Е. Жуковского (рычаг Жуковского)
В тех случаях, когда не требуется определять реакции в кинематических парах, уравновешивающую силу можно найти, воспользовавшись принципом возможных перемещений. Согласно этому принципу, если на какую-либо механическую систему действует ряд сил, то прибавив условно к заданным силам силы инерции и дав всей системе возможные для данного положения перемещения, получим ряд элементарных работ, сумма которых должна равняться нулю.
Для системы, обладающей стационарными связями (т.е. связями, не зависящими от времени), возможные перемещения δ i совпадают с действительными элементарными перемещениями. Математически это можно выразить в следующем виде:

¨ Или, разделив на dt,

¨ где Fi – задаваемые силы;
Vi – скорость точек приложения сил Fi;
 – угол между вектором силы и вектором скорости точки приложения;
– угол между вектором силы и вектором скорости точки приложения;
ni – мощность, развиваемая силой Fi.
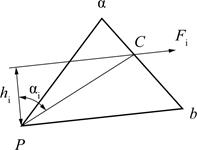
Предположим, что в точке C звена AB приложена сила Fi (рис. 4.4).
Для дальнейших рассуждений построим повёрнутый план скоростей (рис. 4.5) Силу Fi переносят со звена AB в точку С плана скоростей. При этом перенесении оставляют без изменения величину и направление силы Fi. Из точки p – полюса плана скоростей, опускают на направление этой силы перпендикуляр hi. Мощность ni силы Fi может быть выражена следующим образом:
 .
.

| 
|
| Рис. 4.4. Силы, действующие на звено | Рис. 4.5. Повёрнутый план скоростей механизма |
Из построения следует, что угол между Fi и hi равен α i для механизма
 .
.
Так как в уравнение входит общий множитель μ v, не равный нулю, то после сокращения на него получаем

¨ или

Уравнение может быть истолковано следующим образом.
Если все заданные силы, действующие на механизм в рассматриваемый момент времени, в том числе и силы инерции, перенести параллельно самим себе в одноимённые точки повёрнутого плана скоростей, то повёрнутый план скоростей можно рассматривать как некоторый рычаг с опорой в полюсе плана скоростей, находящийся под действием всех рассматриваемых сил в равновесии.
Этот метод Жуковского может быть применён для нахождения одной любой неизвестной силы, если точка приложения и линия действия этой силы заданы. Если на звенья механизма действуют моменты сил инерции, то последние нужно заменить силами с определёнными плечами.
Применим метод Жуковского для нахождения уравновешивающей силы Fy.
Пусть на звенья 2 и 3 механизма, изображённого на рис. 4.6, действуют силы F 2 и F 3, приложенные в точках C и D.

| 
|
| Рис. 4.6. Схема механизма | Рис. 4.7. Повёрнутый план скоростей механизма |
Силы F 2 и F 3представляют собой равнодействующие всех действующих сил на звенья 2 и 3, включая и силы инерции. Очевидно, что в общем случае под действием произвольно выбранных сил механизм не будет находиться в равновесии. Для приведения механизма в равновесие необходимо приложить уравновешивающую силу Fy или уравновешивающий момент My. За точку приложения уравновешивающей силы Fy принимают точку А, направляя её перпендикулярно к O 1 A. Далее строят повёрнутый план скоростей (рис. 4.7) и переносят на него действующие силы. Затем составляют уравнения моментов этих сил относительно полюса p плана скоростей:

откуда определяют уравновешивающую силу
 .
.
4.7. Рекомендуемая последовательность
выполнения кинетостатического расчета механизма
Кинетостатический расчет рекомендуется выполнять в следующей последовательности:
1. Проанализировать исходные данные и поставленную задачу. В случае определения реакций для заданного угловой координатой φ1 положения начального звена вычертить кинематическую схему в заданном положении механизма. По первому листу проекта найти значения движущих сил и моментов, сил полезного сопротивления и сил тяжести.
2. По первому листу проекта найти угловую скорость ω1 и угловое ускорение ε1 начального звена механизма.
3. Определить значения и направления главных векторов и главных моментов сил инерции для заданного положения механизма.
4. На кинематической схеме механизма изобразить векторы внешних сил, сил тяжести, и сил инерции и моментов сил. Расчленить механизм на статически определимые группы звеньев. По принципу освобождаемости от связей отбросить для каждой группы звеньев соответствующие связи, заменить их векторами соответствующих реакций.
5. Для каждой группы звеньев составить векторные уравнения суммы сил (уравнения суммы проекций сил на координатные оси) или алгебраические уравнения суммы моментов сил (включая инерционные силы) и решить их графическим или численным методом с использованием ЭВМ.
6. При наличии в математическом обеспечении отлаженных программ изучить алгоритм и программу вычислений, правила ввода-вывода, подготовить исходные данные. По результатам вычислений построить годографы сил в каждой кинематической паре. Сопоставить результаты вычислений на ЭВМ с результатами, полученными путем графоаналитического решения.








