 2020-01-14
2020-01-14 276
276Рассмотрим равновесие звена АВ. К нему приложены следующие силы (рис. 4.21): в точке В – сила  в точке А – вес зубчатого колеса
в точке А – вес зубчатого колеса  и реакция
и реакция  в точке
в точке  – вес кривошипа
– вес кривошипа  и центробежная сила инерции
и центробежная сила инерции 
Уравнение равновесия ведущего звена:
 . (4.37)
. (4.37)
Силу  находим из уравнения моментов сил, приложенных к звену 1, относительно точки А.
находим из уравнения моментов сил, приложенных к звену 1, относительно точки А.

| 
|
| Рис. 4.21. Первоначальный механизм | Рис. 4.22. План сил ведущего звена |
Плечом уравновешивающей силы будет радиус основной окружности  зубчатого колеса:
зубчатого колеса:
 , (4.38)
, (4.38)
 (4.39)
(4.39)
¨ откуда
 (4.40)
(4.40)
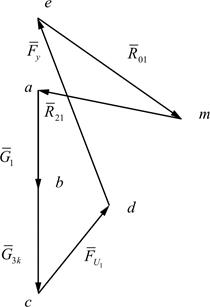
После определения величины построением замкнутого многоугольника сил согласно уравнению (4.37) определяется реакция стойки на звено 1  (рис. 4.22):
(рис. 4.22):

4.9.5. Определение уравновешивающей силы (Fy)
с помощью рычага Жуковского
Поворачиваем план скоростей для рассматриваемого положения механизма на 90° по направлению, противоположному вращению часовой стрелки. Все внешние силы, включая и силы инерции звеньев, переносим параллельно самим себе в соответствующие точки плана (рис. 4.23).
Скорость точки приложения уравновешивающей силы
 .
.
Далее составляем уравнение равновесия рычага Жуковского в следующем виде:


При наличии моментов  приложенных к звеньям, можно обойтись и без замены их парой сил. В этом случае к плану скоростей прикладываются моменты
приложенных к звеньям, можно обойтись и без замены их парой сил. В этом случае к плану скоростей прикладываются моменты  определяемые по уравнениям:
определяемые по уравнениям:

Рис. 4.23. Повернутый план скоростей
При этом момент  имеет тот же знак, что и момент
имеет тот же знак, что и момент  , если CD на плане механизма и
, если CD на плане механизма и  на повернутом плане скоростей совпадают по направлению. Если направление противоположно CD,то моменты
на повернутом плане скоростей совпадают по направлению. Если направление противоположно CD,то моменты  и имеют разные знаки.
и имеют разные знаки.
Таким образом, если к звеньям механизма приложены силы и моменты, то уравнение равновесия вспомогательного рычага можно написать в следующем виде:
Мощность двигателя определяется по аналогии с предыдущим примером.
4.10. Принцип виртуальных перемещений
для силового расчёта
Запишем для механизма принцип виртуальных перемещений в координатной форме:
 , (4.41)
, (4.41)
где  – проекции всех сил, приложенных к звеньям механизма, кроме реакций в кинематических парах;
– проекции всех сил, приложенных к звеньям механизма, кроме реакций в кинематических парах;  – моменты всех сил, приложенных к звеньям;
– моменты всех сил, приложенных к звеньям;  – виртуальные осевые перемещения точек приложения сил;
– виртуальные осевые перемещения точек приложения сил;  – виртуальные угловые перемещения звеньев механизма; n – число сил и моментов сил. Это уравнение является основным для силового расчета. Из него получаем два вывода:
– виртуальные угловые перемещения звеньев механизма; n – число сил и моментов сил. Это уравнение является основным для силового расчета. Из него получаем два вывода:
1. Для равновесия механизма в целом и в каждой его точке нельзя задавать произвольно все внешние силы, часть из них должна быть определена в процессе расчета. Такие силы называют уравновешивающими силами  , их число равно числу обобщенных координат механизма. Часто определяют не уравновешивающие силы, а уравновешивающие моменты
, их число равно числу обобщенных координат механизма. Часто определяют не уравновешивающие силы, а уравновешивающие моменты  , так как они связаны с уравновешивающими силами простыми соотношениями.
, так как они связаны с уравновешивающими силами простыми соотношениями.
Рассмотрим механизм строгального станка с приложенной к резцу силой полезного сопротивления  (рис. 4.24). Какую силу необходимо приложить в точке
(рис. 4.24). Какую силу необходимо приложить в точке  перпендикулярно звену
перпендикулярно звену  , чтобы механизм находился в равновесии? Применяем принцип виртуальных перемещений:
, чтобы механизм находился в равновесии? Применяем принцип виртуальных перемещений:
 . (4.42)
. (4.42)
Из планов виртуальных перемещений, построенных на схеме механизма, выразим перемещение  через
через  :
:

 (4.43)
(4.43)
 .
.
Подставляя в (4.42), получим:
 (4.44)
(4.44)

Рис. 4.24. Определение уравновешивающей силы Fy
из принципа виртуальных перемещений
Уравновешивающий момент найдем из соотношения:
 (4.45)
(4.45)
Именно этот момент надо приложить со стороны двигателя (извне), чтобы преодолеть силу полезного сопротивления. В теории механизмов принцип виртуальных перемещений редко используют непосредственно, а учитывают, что при голономных стационарных связях виртуальные перемещения совпадают с действительными перемещениями, поэтому:


 (4.46)
(4.46)
где  – проекции скоростей точек приложения сил;
– проекции скоростей точек приложения сил;  – угловые скорости звеньев.
– угловые скорости звеньев.
Сокращая затем на dt, получают с учетом (4.41):
 (4.47)
(4.47)
Для механизмов с одной обобщенной координатой уравновешивающий момент находим из выражения:
 (4.48)
(4.48)
¨ где  – обобщенная угловая скорость.
– обобщенная угловая скорость.
Окончательно получим:
 (4.49)
(4.49)
2. Из принципа виртуальных перемещений легко получают условия равновесия плоской системы сил. Так как в уравнении (4.41) виртуальные перемещения являются независимыми, то для равенства нулю левой части необходимо:
 (4.50)
(4.50)
Такие уравнения можно составлять как для всего механизма, так и для отдельных его звеньев. В этом случае реакции связей относят к категории внешних сил. В ТММ принято вести силовой расчет погруппно, т.к. группы Ассура являются статически определимыми.








