 2020-01-14
2020-01-14 407
407Рассмотрим начальное звено первого типа (рис. 4.33). Со стороны стойки к нему приложена реакция  или в проекциях
или в проекциях  . Инерционная нагрузка известна, так как закон движения начального звена или задан, или найден из решения уравнения движения. Уравновешивающий момент
. Инерционная нагрузка известна, так как закон движения начального звена или задан, или найден из решения уравнения движения. Уравновешивающий момент  тоже известен, он находится перед началом расчета из (4.49). Нагрузка от всех групп Ассура, образующих механизм, выражена проекциями
тоже известен, он находится перед началом расчета из (4.49). Нагрузка от всех групп Ассура, образующих механизм, выражена проекциями  . Для проверки расчета находим уравновешивающий момент
. Для проверки расчета находим уравновешивающий момент  , составляя сумму моментов относительно точки А:
, составляя сумму моментов относительно точки А:
 (4.111)
(4.111)
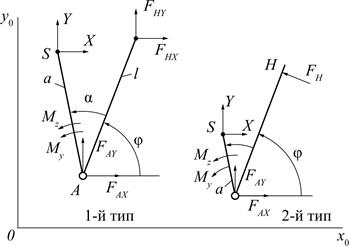
Рис. 4.33. Расчет начальных звеньев
Если расчет реакций сделан правильно, то этот момент будет равен моменту, найденному из (4.49). Найдем реакцию со стороны стойки на начальное звено:
 (4.112)
(4.112)
Рассмотрим начальное звено второго типа (см. рис. 4.33). Структурная группа присоединяется внешней поступательной парой. Реакция в этой поступательной паре может быть выражена либо силой, либо парой сил. Точку приложения реакций обозначим через Н. Для проверки расчета найдем уравновешивающий момент  :
:
 (4.113)
(4.113)
Реакция со стороны стойки:

4.10.2.7. Применение вспомогательных задач
в силовом расчете
Изложенные алгоритмы расчета групп Ассура учитывают только собственную нагрузку на звенья этих групп и справедливы, если механизм состоит из одной группы и начального звена. Если же механизм содержит две группы Ассура и более (способ наслоения), то для каждой последующей группы необходимо учитывать еще нагрузку предыдущих групп. Покажем применение вспомогательных задач на примерах. Пусть предыдущая группа присоединена вращательной парой к звену i группы второго класса первого вида (рис. 4.34). Действие отброшенной группы на звено i заменяем реакцией  или в проекциях
или в проекциях  . Собственную нагрузку на звенья группы в этом случае не учитываем.
. Собственную нагрузку на звенья группы в этом случае не учитываем.
Рассмотрим равновесие звена i:
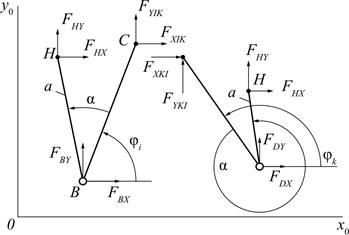
Рис. 4.34. Применение вспомогательной задачи
первого типа к звену i или к звену k группы 21
Равновесие звена k:

Решаем совместно (4.118), (4.121). Обозначим:
 (4.122)
(4.122)
В выражении (4.118):
 (4.123)
(4.123)
Перепишем (4.118), (4.121):
 (4.124)
(4.124)
Сравнивая (4.62) и (4.124), заключаем, что определитель Δ не изменился, так как коэффициенты системы остались прежними.
Свободные члены изменились, так как собственная нагрузка не учитывается.
Найдем реакции  :
:

Далее найдем:
 (4.125)
(4.125)
Полученные реакции будут добавочными для группы, и их нужно складывать с реакциями от собственной нагрузки. Если предыдущая группа была присоединена вращательной парой к звену К, то добавочные реакции для группы второго класса первого вида находим аналогично, но в этом случае свободные члены будут иметь вид:
 (4.126)
(4.126)
¨ где
 (4.127)
(4.127)
Пусть предыдущая группа присоединена поступательной парой к звену i группы второго класса первого вида (рис. 4.35). Действие отброшенной группы на звено i заменяем реакцией  , точка приложения Н которой известна.
, точка приложения Н которой известна.
Находим проекции силы  на оси координат:
на оси координат:
 (4.128)
(4.128)
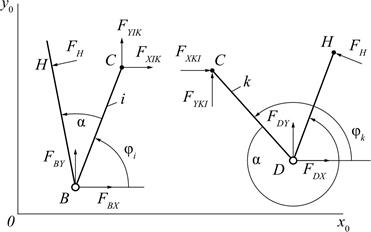
Рис. 4.35. Применение вспомогательной задачи
второго типа к звену i или к звену k группы 21
Находим проекции отрезка ВН на оси координат:
 (4.129)
(4.129)
В дальнейшем расчет добавочных реакций не будет отличаться от только что рассмотренного. Если поступательная пара предыдущей группы присоединяется к звену К группы первого вида, то найдем проекции силы на оси координат:
 . (4.130)
. (4.130)
Найдем проекции отрезка DH:
 (4.131)
(4.131)
Расчет добавочных реакций производим так же, как и в случае присоединения вращательной кинематической пары.
Применение вспомогательных задач для других групп не отличается особой сложностью, и мы опускаем дальнейшее рассмотрение.
4.11. Последовательность силового расчета
аналитическим методом
1. Вычисляем внешнею нагрузку на звенья механизма, включая инерционную нагрузку.
2. Пользуясь результатами решения задачи о скоростях и полученной внешней нагрузкой, находим недостающую внешнюю нагрузку в виде уравновешивающего момента My.
3. Разбиваем механизм на группы Ассура.
4. Рассчитываем реакции в кинематических парах групп от собственной нагрузки в произвольной последовательности.
5. Примененяя вспомогательные задачи первого и второго типов, находим добавочные реакции в кинематических парах групп, начиная с предпоследней группы (учитывая порядок наслоения).
6. Получаем окончательные значения реакций путем суммирования добавочных реакций с реакциями от собственной нагрузки групп.
7. Рассчитываем начальное звено. В целях проверки расчета вновь подсчитываем уравновешивающий момент My.
Пример расчета
Проведем силовой расчет механизма шарнирного четырехзвенника (рис. 4.36) при следующих данных:

В результате кинематического расчета получено:

Проекции скоростей центров масс звеньев:

Инерционная нагрузка на звенья:

Массой начального звена пренебрегаем, поэтому инерционная нагрузка на это звено отсутствует. Длина начального звена l = 0,03 м. Обобщенная угловая скорость  .
.
Расчет механизма проведем для одного значения обобщенной координаты  . Найдем уравновешивающий момент
. Найдем уравновешивающий момент  :
:



Уравновешивающий момент получился со знаком минус, стало быть он направлен по часовой стрелке, то есть против угловой скорости  .
.
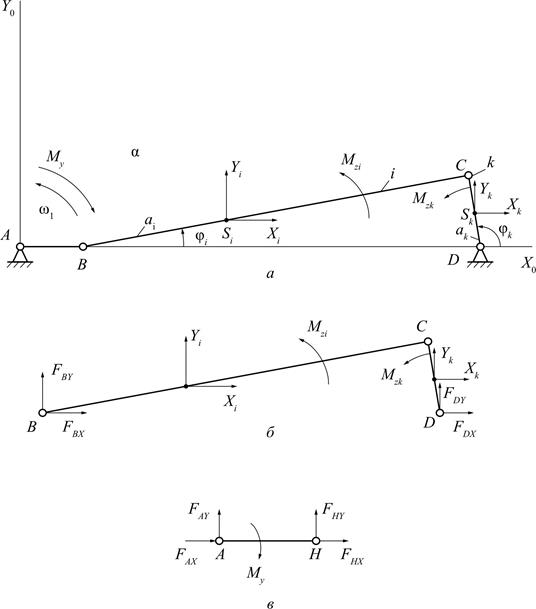
Рис. 4.36. Силовой расчет механизма шарнирного четырехзвенника:
а – силовое нагружение механизма;
б – силовое нагружение группы 21;
в – силовое нагружение начального звена
Под действием этого момента и внешних сил, приложенных к звеньям, механизм находится в равновесии. Выделяем группу Ассура второго класса первого вида и проводим ее расчет по алгоритму. Сначала найдем:

Далее найдем коэффициенты системы уравнений и свободные члены:

Определить системы:

Определить при неизвестных:

Проекции реакции во внутренней кинематической паре:
Далее находим:
Переходя к расчету начального звена, изменим знаки проекций  на противоположные:
на противоположные:
Найдем уравновешивающий момент  :
:

Этот момент направлен по часовой стрелке. Таким образом, из-за ошибок вычислений мы не получили значение  , но расхождение получено в пределах одного процента. Вычисления проводились на микрокалькуляторе БЗ-18А. При расчете на вычислительной машине погрешность тоже возможна, но она значительно меньше и определяется долями процента. Найдем реакции со стороны стойки на начальное звено:
, но расхождение получено в пределах одного процента. Вычисления проводились на микрокалькуляторе БЗ-18А. При расчете на вычислительной машине погрешность тоже возможна, но она значительно меньше и определяется долями процента. Найдем реакции со стороны стойки на начальное звено:

На этом расчет для одного значения обобщенной координаты закончен. Для практических целей его следует производить для 24 положений механизма и более.
4.11.2. Задачи по силовому расчету механизмов
| 4.1. Определить инерционный момент Ми махового колеса при его разгоне, если величина угловой скорости в начале разгона ω0=0, а в конце разгона ω=21 сек-1, промежуток времени разгона t=3 сек. Угловая скорость во время разгона изменяется по закону прямой линии. Момент инерции махового колеса относительно его оси вращения А равен I=20 кгм2. Центр масс колеса лежит на его оси вращения. 4.2. Определить силу инерции Fм махового колеса, вращающегося равномерно со скоростью 600 об/мин; масса махового колеса равна m=50 кг, его центр масс S находится на расстоянии lAS=2 мм от его оси вращения А. Принять π≈3,0 4.3. Найти силу инерции Fu3 ползуна кривошипно-ползунного механизма при положениях его, когда угол φ1 принимает значения 0°, 90° и 180°, если длина кривошипа равна lAB=50 мм, длина шатуна lAB=200 мм, масса ползуна m3=2 кг, угловая скорость кривошипа постоянная и равна ω1=300 сек-1 4.4. Определить инерционную нагрузку шатуна BC шарнирного четырехзвенника в положении, при котором оси кривошипа AB и коромысла CD вертикальны, а ось шатуна BC горизонтальна. Длины звеньев равны lAB=100 мм, lBC=lCD=400 мм. Масса шатуна BC равна m3=4 кг и его центральный момент инерции lS2=0.08 кгм2; центр масс звена BC лежит на середине отрезка BC. Угловая скорость кривошипа AB постоянна и равна ω1=20 сек-1. 4.5. Определить силы инерции Fub и Fиc шатуна BC кривошипно-ползунного механизма при статическом распределении массы шатуна в центры шарниров B и C. Задачу решить для положения, когда угол φ1=90°. Дано lAB=100 мм, lBC=400 мм, lBS2=100 мм, точка S2 – центр масс шатуна, масса шатуна m2=4 кг, угловая скорость кривошипа постоянна и равна ω1=100 сек-1. |

|
 4-6. Определить инерционную нагрузку шатуна Вх механизма с качающимся ползуном при том положении его, когда угол АВС=90◦. Дано: lАВ=100 мм, lАС=200мм, координата центра масс шатуна l
4-6. Определить инерционную нагрузку шатуна Вх механизма с качающимся ползуном при том положении его, когда угол АВС=90◦. Дано: lАВ=100 мм, lАС=200мм, координата центра масс шатуна l  =86 мм, масса шатуна
=86 мм, масса шатуна  =20 кг; центральный момент инерции шатуна Ι
=20 кг; центральный момент инерции шатуна Ι  =0,074
=0,074  , угловая скорость кривошипа постоянна и равна
, угловая скорость кривошипа постоянна и равна  =40
=40  .
.

4-7. Определить силу инерции толкателя 2 кулачкового механизма при том положении его, при котором линия ОА горизонтальна (кулачок представляет собою диск радиуса R=200 мм). Размер lАО=100 мм, масса толкателя 2 m2=2 кг, угловая скорость кулачка постоянна и равна  =20
=20  .
.
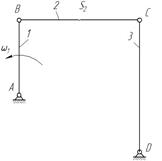
 4-8. Определить инерционную нагрузку всех звеньев механизма шарнирного четырёхзвенника при том положении, его когда оси кривошипа АВ и коромысла CD вертикальны, а ось шатуна BC горизонтальна. Дано: lАВ=100 мм, lBC= lCD=200мм; центры масс S1, S2, S3 звеньев делят межшарнирные расстояния пополам; массы звеньев m1= m2= m3=1,0 кг, момент инерции шатуна относительно его центральной оси S2 Ι
4-8. Определить инерционную нагрузку всех звеньев механизма шарнирного четырёхзвенника при том положении, его когда оси кривошипа АВ и коромысла CD вертикальны, а ось шатуна BC горизонтальна. Дано: lАВ=100 мм, lBC= lCD=200мм; центры масс S1, S2, S3 звеньев делят межшарнирные расстояния пополам; массы звеньев m1= m2= m3=1,0 кг, момент инерции шатуна относительно его центральной оси S2 Ι  =0,005 кгм2, угловая скорость кривошипа постоянна и равна
=0,005 кгм2, угловая скорость кривошипа постоянна и равна  =20
=20  .
.
 4-9. Определить инерционную нагрузку кулисы Сх механизма Витворта при том положении его, когда угол АВС=90◦. Дано: lАВ=100 мм, lАС=200мм, центр масс кулисы Сх совпадает с центром шарнира С, центральный момент инерции кулисы Ι
4-9. Определить инерционную нагрузку кулисы Сх механизма Витворта при том положении его, когда угол АВС=90◦. Дано: lАВ=100 мм, lАС=200мм, центр масс кулисы Сх совпадает с центром шарнира С, центральный момент инерции кулисы Ι  = 0.2 , угловая скорость кривошипа постоянна и равна
= 0.2 , угловая скорость кривошипа постоянна и равна  =20 .
=20 .
 4-10. Определить инерционную нагрузку коромысла CD механизма шарнирного четырёхзвенника при том положении, его когда оси кривошипа АВ и шатуна BC горизонтальны, а ось коромысла вертикальна. Дано: lАВ=100 мм, lВС= lСD=400 мм, центр масс S3 коромысла CD совпадает с его осью вращения D, его центральный момент инерции равен Ι
4-10. Определить инерционную нагрузку коромысла CD механизма шарнирного четырёхзвенника при том положении, его когда оси кривошипа АВ и шатуна BC горизонтальны, а ось коромысла вертикальна. Дано: lАВ=100 мм, lВС= lСD=400 мм, центр масс S3 коромысла CD совпадает с его осью вращения D, его центральный момент инерции равен Ι  =0,1 кгм2 угловая скорость кривошипа постоянна и равна
=0,1 кгм2 угловая скорость кривошипа постоянна и равна  =20 .
=20 .

4-11. Определить инерционные моменты М  и М
и М  зубчатых колёс рядового зацепления, если известно, что в рассматриваемый момент времени первое колесо вращается с угловой скоростью
зубчатых колёс рядового зацепления, если известно, что в рассматриваемый момент времени первое колесо вращается с угловой скоростью  =20
=20  и угловым ускорением
и угловым ускорением  =100
=100  . Числа зубьев на колёсах z1= 20, z2= 40, центры масс колёс лежат на осях их вращения; центральные моменты инерции колёс Ι
. Числа зубьев на колёсах z1= 20, z2= 40, центры масс колёс лежат на осях их вращения; центральные моменты инерции колёс Ι  =0,1
=0,1  Ι =0,4
Ι =0,4 
 4-12. Ротору, вращающемуся с угловой скоростью, равной =100 , необходимо сообщить угловое ускорение, равное =7,5
4-12. Ротору, вращающемуся с угловой скоростью, равной =100 , необходимо сообщить угловое ускорение, равное =7,5  . Центральный момент инерции ротора равен Ι
. Центральный момент инерции ротора равен Ι  =8
=8  . Пренебрегая трением в подшипниках ротора, определить
. Пренебрегая трением в подшипниках ротора, определить

4-13. Ползуну, движущемуся со скоростью равной υ=5 м  необходимо сообщить ускорение, совпадающее по направлению со скоростью и равное α=10 м
необходимо сообщить ускорение, совпадающее по направлению со скоростью и равное α=10 м  . Пренебрегая трением ползуна о направляющие, определить мощность N внешней силы Р, способной сообщить ползуну заданное ускорение, если масса ползуна m= 20 кг.
. Пренебрегая трением ползуна о направляющие, определить мощность N внешней силы Р, способной сообщить ползуну заданное ускорение, если масса ползуна m= 20 кг.
 4-14. Ротор гироскопа, вращающийся с постоянной угловой скоростью =2000
4-14. Ротор гироскопа, вращающийся с постоянной угловой скоростью =2000  , имеет неуравновешенность, оцениваемую величиной mρ= 2,0 гсм. Определить реакции в опорах вала ротора гироскопа от его инерционной нагрузки (силы инерции). Опоры расположены симметрично относительно ротора гироскопа.
, имеет неуравновешенность, оцениваемую величиной mρ= 2,0 гсм. Определить реакции в опорах вала ротора гироскопа от его инерционной нагрузки (силы инерции). Опоры расположены симметрично относительно ротора гироскопа.
 4-15.Штифт барабана молотилки (масса штифта равна 200 г), центр масс которого расположен на расстоянии lАS=200мм от оси вращения барабана, вращается вместе с барабаном, делающим = 1000 об/мин. Определить силу инерции штифта.
4-15.Штифт барабана молотилки (масса штифта равна 200 г), центр масс которого расположен на расстоянии lАS=200мм от оси вращения барабана, вращается вместе с барабаном, делающим = 1000 об/мин. Определить силу инерции штифта.

4-16. Определить наибольшую воздействующею на поршневой палец C механизма двигателя внутреннего сгорания (Кривошипно-ползунного) силу инерции поршня 3, если масса поршня m= 400 г. Кривошип вращается равномерно со скоростью  = 3600 об/мин и lАВ=40 мм, lBС=160 мм.
= 3600 об/мин и lАВ=40 мм, lBС=160 мм.

4-17. Определить силу инерции толкателя 2, которая воздействует на профиль кулачка механизма с центрально поставленным толкателем в начальный момент подъёма толкателя, если масса толкателя m = 500 г, а вторая производная от функции положения толкателя равна в момент начала подъёма 
(первая производная той же функции в тот же момент равна нулю:  ), число оборотов кулачка постоянно и равно
), число оборотов кулачка постоянно и равно  = 1000 об/мин.
= 1000 об/мин.
 190.
190.
 = 1440 об/мин, числа зубьев на колёсах соответственно равны z1= 20, z2= 40, z3= 100, модули всех колёс равны m=5 мм, масса сателлита равна m2=400 г.
= 1440 об/мин, числа зубьев на колёсах соответственно равны z1= 20, z2= 40, z3= 100, модули всех колёс равны m=5 мм, масса сателлита равна m2=400 г.

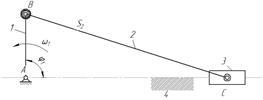
4-18. Определить максимальную силу инерции поршня 3 насоса, в основу которого положен синусный механизм, если радиус кривошипа АВ равен lАВ=50 мм, масса звена 3 равна m3= 8 кг, кривошип вращается равномерно со скоростью n2 =300 об/мин.








