 2020-01-14
2020-01-14 151
151Построение графика решения у(t) для системы {А, В, С}, если  и
и 

Таблица 5 Значение выходов непрерывной системы
 Возмущение Возмущение
| Реакция выхода системы y(t) | ||||||||||
| u1=0 u2=0,01 | Y1 Y2 10 -3 | 0 | 3.874 | 6.247 | 7.701 | 8.591 | 9.137 | 9.471 | 9.676 | 9.802 | 9.878 |
| 0 | -2.548 | -3.523 | -3.896 | -4.038 | -4.093 | -4.114 | -4.122 | -4.125 | -4.126 | ||
| u1=0,01 u2=0 | Y1 Y2 | 0 | 3.874 | 6.247 | 7.701 | 8.591 | 9.137 | 9.471 | 9.676 | 9.802 | 9.878 |
| 0 | 0.023 | 0.03 | 0.034 | 0.035 | 0.035 | 0.036 | 0.036 | 0.036 | 0.036 | ||
| время t, с | 0 | 12 | 24 | 37 | 49 | 61 | 74 | 86 | 98 | 111 | |


Рисунок 6 – Реакция первого выхода на возмущения u1(t)
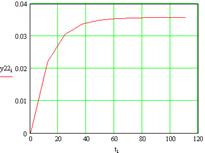
Рисунок 7 – Реакция второго выхода на возмущения u1(t)

Рисунок 8 – Реакция первого выхода на возмущения u2(t)
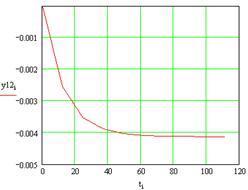
Рисунок 9 – Реакция второго выхода на возмущения u2(t)
Построение графиков кривой разгона дискретной системы
Система в дискретном времени имеет вид:

dt=24 c.



Зададим  ,
,  , получим значения на выходах дискретной системы, которые совпадают с расчетом задания в п.4.
, получим значения на выходах дискретной системы, которые совпадают с расчетом задания в п.4.
Таблица 6 Значение выходов дискретной системы
| Возмущение | Реакция выхода системы y(t) | |||||||||||
| u1=0.01
u2=0 | y1 y2 10-3 | 0 | 0 | 3.874 | 6.247 | 7.701 | 8.591 | 9.137 | 9.471 | 9.676 | 9.802 | 9.878 |
| 0 | 0 | -2.548 | -3.523 | -3.896 | -4.038 | -4.093 | -4.114 | -4.122 | -4.125 | -4.126 | ||
| такт | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |



Рисунок 10 – Реакция выходов системы на возмущения u (t)
Построение графиков кривой разгона нелинейной системы
Данные для построения графиков получены в пункте 1.1.2
Для первого выхода пользуемся таблицей 1. Получившиеся графики можем сопоставить с графиками полученным в пункте 1.3.1, введя поправку на начальное значение параметра

Рисунок 11 – Реакция первого выхода на возмущения u1(t) в пункте 1.3.1

Рисунок 12 – Реакция первого выхода на возмущение для линеаризованной системы
Легко видеть, что эти график совпадают, что говорит о том, что линеаризация по первому выходу проведена на приемлемом уровне
Рисунок 14 – Реакция второго выхода на возмущения u1(t) полученного в пункте 1.3.1

Рисунок 13 – Реакция второго выхода на возмущения для линеаризованной системы
В данном случае имеет место погрешность которую можно связать с ошибкой вносимой кусочно – линейной аппроксимации.
Установившиеся состояния системы
Вычислить постоянное значение состояния системы в условиях


Т.к. установившееся значение предполагает отсутствие динамики, то систему можно записать в следующем виде


Идентификация многомерной математической модели по данным эксперимента








