 2020-05-12
2020-05-12 400
400Вращательное движение – такое движение, при котором все точки тела, лежащие на некоторой прямой, неизменно связанной с телом, называемой осью вращения, остаются неподвижными в рассматриваемой системе отсчета.
При этом движении все остальные точки тела движутся в плоскостях перпендикулярных оси вращения, и описывают окружности, центры которых лежат на этой оси.
Вращательное движение характеризуется углом поворота j, угловой
скоростью w и угловым ускорением e.
Для задания вращательного движения необходимо знать угол пово- рота j в функции времени t, т.е. уравнение вращательного движения:
j = f (t ). (2.1)

|
w = dj
dt
= j. (2.2)
Угловое ускорение – величина, характеризующая изменение угловой скорости w по величине в единицу времени, [ e ]= éëc-2 ùû :
 e = dw = d 2 j = j
e = dw = d 2 j = j
 |
dt dt 2
. (2.3)
Угловую скорость и угловое ускорение удобно представлять в виде скользящих векторов w и e лежащих вдоль оси вращения (рисунок 2.2 а, б).
Вектор w направлен в ту сторону, откуда видно вращение тела (по
w), происходящее против хода часовой стрелки.
Направление вектора e определяется аналогично.
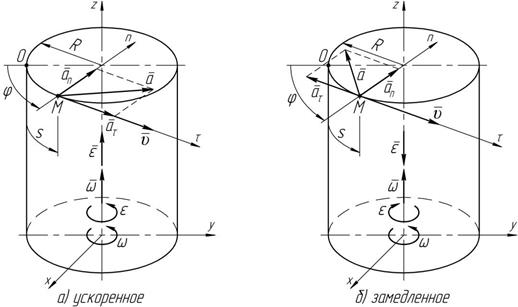
Рисунок 2.2
Если векторы w и e сонаправлены, то вращение ускоренное (рисунок 2.2 а).
Если векторы w и e противоположно направлены, то вращение
замедленное (рисунок 2.2 б).
Определение линейных скорости и ускорения точки M вращающегося тела (рисунок 2.2 а, б)
Так как s = jR, то
u = ds = d ( jR ) = dj R = wR,
dt dt dt
где R – расстояние от рассматриваемой точки вращающегося тела до оси вращения, м.
Скорость любой точки вращающегося тела равняется произведению угловой скорости тела на расстояние от этой точки до оси вращения, т.е.:
u = wR. (2.4)
a = du = d ( wR ) = dw R = e R. (2.5)
t dt dt dt
Касательное ускорение равняется произведению углового ускорения тела на расстояние от рассматриваемой точки вращающегося тела до оси вращения.
u 2 (wR)2
a = = = w 2 R. (2.6)


n r R
Нормальное ускорение равняется произведению квадрата угловой скорости тела на расстояние от рассматриваемой точки вращающегося тела до оси вращения.
Тогда полное ускорение соответственно определится:


 a = = = R . (2.7)
a = = = R . (2.7)








