 2014-02-02
2014-02-02 1343
1343Рис. 2.38
Механическая характеристика реальных гистерезисных микродвигателей не абсолютно жесткая. Изменение гистерезисного момента в функции угловой скорости ротора, (скольжения) объясняется в основном тремя факторами.
Во-первых, при неравенстве угловых скоростей ротора и поля в роторе наводятся вихревые токи, которые во взаимодействии с вызвавшим их полем Φ1 создают момент Mв, являющийся, по существу, моментом асинхронного двигателя (пунктирная линия на рис. 2.36, б).
Во-вторых, при конденсаторной схеме включения двухфазного гистерезисного двигателя (см. рис. 2.24, б) в однофазную сеть форма вращающегося магнитного поля статора, а значит, и момент Мг.а (штрихпунктирная линия на рис. 2.36, б) зависят от угловой скорости ротора. При изменении угловой скорости ротора меняются частота перемагничивания, потери в роторе и соответственно ток в обмотках статора. Происходит перераспределение напряжений между конденсатором и обмоткой; при этом поле, круговое при одном скольжении (например, при s = 0), становится эллиптическим при другом.
 В-третьих, влиянием моментов высших гармоник поля. В синхронном режиме магнитное поле статора и ротор вращаются с одинаковой угловой скоростью и перемагничивания материала ротора не происходит. Магнитный поток ротора Ф2ост сохраняется вследствие остаточного магнетизма и вращается вместе с ротором с синхронной угловой скоростью. Поток тем больше, чем выше значение остаточной индукции Вт. Микродвигатель работает как обычный синхронный микродвигатель с постоянными магнитами на роторе. Отличие состоит только в том, что угол отставания оси поля ротора, принимаемой за его продольную ось, от оси поля статора гистерезисного микродвигателя γ не может превысить угла гистерезисного запаздывания γг, так как в противном случае начинается перемагничивание ротора.
В-третьих, влиянием моментов высших гармоник поля. В синхронном режиме магнитное поле статора и ротор вращаются с одинаковой угловой скоростью и перемагничивания материала ротора не происходит. Магнитный поток ротора Ф2ост сохраняется вследствие остаточного магнетизма и вращается вместе с ротором с синхронной угловой скоростью. Поток тем больше, чем выше значение остаточной индукции Вт. Микродвигатель работает как обычный синхронный микродвигатель с постоянными магнитами на роторе. Отличие состоит только в том, что угол отставания оси поля ротора, принимаемой за его продольную ось, от оси поля статора гистерезисного микродвигателя γ не может превысить угла гистерезисного запаздывания γг, так как в противном случае начинается перемагничивание ротора.
Следовательно, наибольшее значение момента Мг.с, развиваемое гистерезисным двигателем в синхронном режиме, равно Мг.а. При моменте сопротивления на валу, превышающем Мг.а, ротор выходит из синхронизма. У гистерезисных микродвигателей угол γг обычно не превышает 20 – 25°.
Из сказанного следует, что синхронный гистерезисный микродвигатель развивает вращающий момент и при асинхронной, и при синхронной угловой скорости ротора. Режим его работы зависит от значения и характера статического момента сопротивления Мст на валу ротора (см. рис. 2.36, а). Если во всем диапазоне скольжений от 1 до 0 момент сопротивления (прямая 1) меньше гистерезисного момента, то двигатель работает в синхронном режиме. Ось поля ротора отстает от оси поля статора на угол γ, при котором соблюдается равновесие моментов Мг.с = Мст. Если момент сопротивления меняется по прямой 2, то равновесие моментов наступит при скольжении sa, соответствующем точке а, т. е. двигатель будет работать в асинхронном режиме (Мг.а = Мст). Однако использование гистерезисных микродвигателей в асинхронном режиме неэкономично вследствие больших потерь на перемагничивание ротора, особенно при больших скольжениях.
Синхронные гистерезисные микродвигатели обладают весьма ценными качествами. Они развивают большой пусковой момент и способны входить в синхронизм при большом моменте инерции нагрузки. Ротор гистерезисного двигателя входит в синхронизм плавно, без рывков благодаря практически постоянному значению пускового гистерезисного момента на протяжении всего периода пуска от s = l до s = 0. Потребляемый гистерезисным двигателем ток незначительно (на 20 – 30%) изменяется при изменении режима работы от короткого замыкания (пуск) до холостого хода, что позволяет эффективно использовать гистерезисные двигатели в повторно-кратковременном режиме. Гистерезисные микродвигатели просты по конструкции и надежны в эксплуатации.
Энергетические показатели гистерезисного микродвигателя не особенно высоки, так как поток ротора является вторичным, т.е. наведенным рабочим потоком статора, и режим работы такого двигателя соответствует режиму синхронной машины с недовозбуждением. Однако у гистерезисных микродвигателей в синхронном режиме существует возможность изменения намагничивающего тока и соответственно к.п.д. и cos φ.
Это можно проследить на примере зависимости тока I1 гистерезисного микродвигателя в синхронном режиме от напряжения возбуждения U1 при снижении последнего от значения U1п, при котором происходит пуск (U-образная характеристика на рис. 2.38). Значение возбужденной м.д.с. ротора определяется напряжением пуска U1п, а значение результирующего потока двигателя уменьшается пропорционально U1. Значит, при уменьшении U1/U1п возрастает роль м.д.с. ротора в создании результирующего магнитного поля и меняются значение и характер тока статора. Индуктивная намагничивающая составляющая тока статора (φ > 0) постепенно уменьшается до нуля (φ = 0) и затем появляется размагничивающая емкостная составляющая (φ < 0). Эта зависимость по физической сути аналогична U-образной характеристике синхронного двигателя с электромагнитным возбуждением.
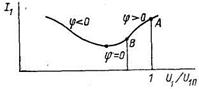
В рабочем режиме гистерезисного микродвигателя при синхронном вращении ротора к.п.д. и cos φ можно повысить путем подмагничивания ротора с помощью кратковременного (на 2 – 3 периода) повышения значения магнитного потока статора за счет увеличения подводимого к статору напряжения. Подмагниченный ротор, как и ротор с постоянными магнитами синхронного микродвигателя, начинает активнее участвовать в создании основного рабочего магнитного потока и тем самым разгружать обмотку статора от реактивного намагничивающего тока. Это соответствует смещению рабочей точки характеристики двигателя из точки А в точку В на рис. 2.38.
ПРИМЕНЕНИЕ СИНХРОННЫХ МИКРОДВИГАТЕЛЕЙ; ШАГОВЫЕ МИКРОДВИГАТЕЛИ
Синхронные микродвигатели выпускают для работы в системах как с постоянной частотой напряжения питания, так и с переменной.
Первые применяются в таких приборах и установках (звукозаписи, телевидения и т.д.), где требуется постоянная угловая скорость при изменении момента сопротивления в определенных пределах. Изменение синхронной угловой скорости ротора этих двигателей возможно только переключением обмоток статора на другое число пар полюсов. Следует отметить, что свойством полисинхронизма, т.е. способностью одного и того же двигателя работать при различном числе полюсов обмотки статора, среди синхронных обладают только гистерезисные микродвигатели. У них число полюсных зон на роторе автоматически получается равным числу полюсов на статоре. Во всех остальных синхронных микродвигателях число полюсов на роторе фиксируется конструктивно.
Двигатели второго типа рассчитаны на плавное или дискретное регулирование синхронной угловой скорости ротора за счет изменения частоты напряжения питания. Двигатели с плавным регулированием частоты применяют в основном в системах синхронной связи.
К синхронным микродвигателям, используемым в системах звукозаписи, звуковоспроизведения и т. д., предъявляются жесткие требования по уровню создаваемых звуковых шумов. Для сравнения различных синхронных микродвигателей по этому показателю выделим основные причины шумов.
Шумы механического происхождения возникают в результате вибраций за счет динамического небаланса ротора, работы подшипников и скользящих контактов. Шумы аэродинамического происхождения появляются в результате воздушных завихрений при вращении ротора. Шумы магнитного происхождения возникают в результате вибраций магнитопровода под действием переменных электромагнитных сил, обусловленных в основном изменением магнитного сопротивления потоку вдоль окружности ротора.
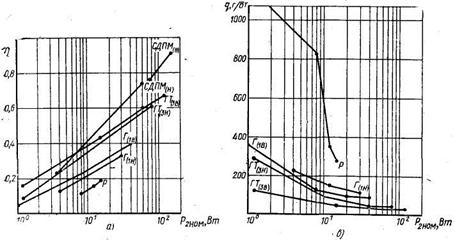
Рис. 2.39
В соответствии с изложенным наименьший уровень шумов достигается у гистерезисных микродвигателей, имеющих симметричный в механическом и магнитном отношении ротор с гладкой поверхностью. Наибольший уровень шумов наблюдается у реактивных микродвигателей с явнополюсным ротором (см. рис. 2.28, а).
Наиболее высокие энергетические показатели (к.п.д. η и коэффициент мощности cos φ) и наименьшую массу q на единицу номинальной мощности имеют микродвигатели активного типа с постоянными магнитами. При частоте напряжения питания 50 Гц в диапазоне мощностей 10 – 100 Вт η = 40÷80% (меньшие значения относятся к двигателям меньшей мощности). Затем идут гистерезисные микродвигатели, режим которых, как указывалось, соответствует режиму работы синхронной машины с недовозбуждением. При тех же условиях их к.п.д. η = 30÷50%. Наихудшие показатели имеют реактивные микродвигатели, у которых поток возбуждения ротора вообще отсутствует. В указанных условиях их к.п.д. η = 20÷40%.
ШАГОВЫЕ (ИМПУЛЬСНЫЕ) ДВИГАТЕЛИ
Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например, электронного) коммутатора.
Принцип действия. Под воздействием каждого импульса ротор двигателя совершает определенное угловое перемещение, называемое шагом. Коммутатор преобразует заданную последовательность управляющих импульсов в m-фазную систему одно- и двухполярных прямоугольных импульсов напряжения.
На рис. 2.40 изображена схема m-фазного шагового двигателя без обмотки возбуждения на роторе. Если фазы 1, 2, 3,..., m обмотки якоря рассматриваемого двигателя питаются поочередно однополярными импульсами напряжения, то ротор двигателя скачкообразно перемещается в положения, при которых его ось совпадает с осями фаз 1, 2, 3 и т.п. Следовательно, ротор имеет m устойчивых состояний, соответствующих направлению вектора МДС F1 (рис. 2.40, а) обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m.
Для увеличения результирующей МДС якоря, а следовательно, магнитного потока и синхронизирующего момента обычно одновременно подают питание на две, три и большее количество фаз.
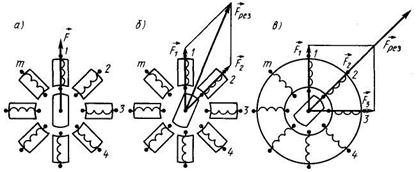
Рис. 2.40. Схемы работы шагового двигателя при питании различных фаз обмотки якоря (а – в)
Так, например, если одновременно подают питание на две фазы, то положение результирующего вектора МДС Fрез и оси ротора совпадает с линией, проходящей между осями двух соседних фаз (рис. 2.40, б). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 2.40, в). Если поочередно включают то четное (две), то нечетное (одна, три) число фаз, то ротор двигателя имеет 2m устойчивых состояния и шаг равен π/m. Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т.п., называют симметричным; поочередное включение неравных групп фаз – несимметричным.
В качестве шаговых обычно применяют синхронные двигатели без обмотки возбуждения на роторе: с постоянными магнитами, реактивные и индуктивные (с подмагничиванием). Для получения требуемых статических характеристик и динамических свойств их выполняют без пусковой обмотки, с ротором минимального диаметра и рассчитывают на большие электромагнитные нагрузки.
Применение шагового двигателя целесообразно для привода механизмов, имеющих старт-стопное движение, или механизмов с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов (лентопротяжных устройств для ввода и вывода информации, счетчиков, приводов станков с программным управлением и т.п.).
ШАГОВЫЕ ДВИГАТЕЛИ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ
Ротор двигателя (рис. 2.41) выполняют в виде постоянного магнита (звездочки) литой или составной конструкции без полюсных наконечников. Статор имеет явно выраженные полюсы, вокруг которых в полузакрытых пазах размещаются катушки обмотки якоря (двух-, трех- или четырехфазной). В многополюсных машинах число пазов на полюс и фазу q = 1, т.е. обмотку выполняют сосредоточенной. Шаговые двигатели этого типа называют также магнитоэлектрическими.
В двигателе с двухфазной обмоткой якоря при последовательной подаче импульсов напряжения на катушки полюсов ось магнитного потока скачкообразно перемещается на 90° (рис. 2.41, а – в). В результате под действием синхронизирующего момента при каждом импульсе ротор поворачивается на 90°, т.е. делает шаг, равный 90°. Возникновение синхронизирующего момента в шаговом двигателе при подаче питания на фазы обмотки якоря обусловлено теми же причинами, что и в синхронном двигателе обычного исполнения.
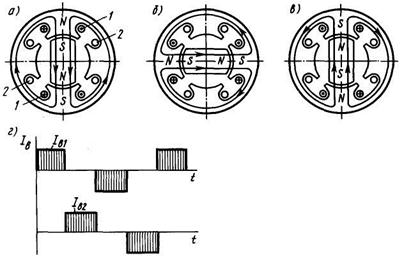
Рис. 2.41. Положения ротора шагового двигателя с постоянными магнитами при различных полярностях включения его фаз (а – в) и диаграмма изменения тока в этих фазах (г)
В рассматриваемом двигателе магнитное поле якоря может иметь четыре различных состояния, которым соответствуют различные направления тока в фазах 1 и 2 его обмотки:
1) ток в фазе 1 направлен от начала к концу; фаза 2 обесточена;
2) ток в фазе 2 направлен от начала к концу; фаза 1 обесточена;
3) ток в фазе 1 направлен от конца к началу; фаза 2 обесточена;
4) ток в фазе 2 направлен от конца к началу; фаза 1 обесточена.
Порядок переключения (коммутации) фаз 1 и 2 обмотки якоря представлен на рис. 2.41, г в виде временной диаграммы изменения токов Iв1 и Iв2 в этих фазах. Каждому импульсу тока соответствует определенное положение ротора двигателя. Рассмотренную систему переключения фаз 1 и 2 обмотки якоря называют четырехтактной разнополярной коммутацией и сокращенно обозначают следующим образом: (+1)–(+2)–(–1)–(–2)–(+1)–... Каждым четырем тактам соответствует поворот ротора на два полюсных деления. Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не изменяя очередность их коммутации. Для уменьшения шага шаговые двигатели обычно выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
 , (2.39)
, (2.39)
где k – число тактов в одном цикле; p – число пар полюсов. При четырехтактной коммутации шаг восьмиполюсного двигателя αш = 22,5°. Частота вращения ротора двигателя зависит от частоты подачи импульсов:
 . (2.40)
. (2.40)
Диапазон изменения частоты при четырехтактной коммутации обычно составляет 0...500 Гц; максимальной частоте соответствует частота вращения n2max = 2000...3000 об/мин.
В ряде случаев для лучшего использования обмоток применяют четырехтактную коммутацию с попарным включением обмоток: (+1)(+2)–(+2)(–1)–(–1)(–2)–(–2)(+1)–(+1)(+2)–.... Такое включение обмоток позволяет увеличить результирующую МДС ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в 1,5 раза.
Обычно шаговые двигатели имеют четырехфазную обмотку, которая в отличие от двухфазной может управляться однополярными импульсами напряжения; это упрощает конструкцию электронного коммутатора. При подключении к электронному коммутатору фазы такой обмотки соединяют в четырехлучевую звезду с выведенной общей точкой. Коммутацию четырехфазной обмотки обычно выполняют четырехтактной, парной: (12)–(23)–(34)–(41)–(12)–..., вследствие чего обеспечивается такое же увеличение вращающего момента, что и при попарной разнополярной коммутации двухфазной обмотки. Шаговые двигатели с трехфазной обмоткой требуют шеститактной разнополярной коммутации.
Ротор реактивного шагового двигателя выполняют из магнитомягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку якоря, фазы которой получают питание от электронного коммутатора.
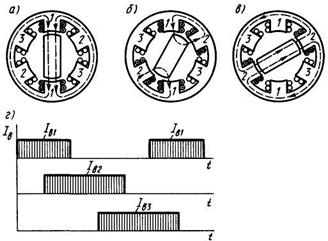
Рис. 2.42. Положения ротора реактивного шагового двигателя при различных полярностях включения фаз (а–в) и диаграмма изменения тока в этих фазах (г)
Шаговые двигатели этого типа называют также параметрическими. На рис. 2.42, а – в схематично показаны три такта работы реактивного шагового двигателя с трехфазной обмоткой якоря и шестью выступами на статоре; на роторе имеются только два выступа. Когда по фазе 1 проходит ток, ротор занимает положение, показанное на рис. 2.42, а. В следующий момент времени питание подается одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 2.42, б), соответствующее наибольшей магнитной проводимости для потока, созданного этими фазами. Далее питание с фазы 1 снимается и ротор перемещается в положение рис. 2.42, в. Таким образом, коммутация обмоток статора происходит в следующем порядке: 1–12–2–23–3–31–1..., т.е. коммутация является несимметричной, шеститактной, однополярной (рис. 2.42, г). При этом шаг двигателя αш =30°. Возможна и трехтактная коммутация по схеме: (1)–(2)–(3)–(1) или (12)–(23)–(31)–(12).... Как правило, применяют шеститактную коммутацию, которая дает меньший шаг и большую устойчивость работы двигателя.
Шаг двигателя можно уменьшить, увеличив число выступов на роторе. Например, применяя шаговый двигатель с крестообразным ротором (рис. 2.43), при той же последовательности подачи импульсов, что и для двигателя, показанного на рис. 2.42, получают шаг, равный 15°. Дальнейшее уменьшение шага, т. е. повышение точности работы двигателя, можно обеспечить увеличив число выступов на статоре и роторе, т. е. перейдя к схеме редукторного двигателя.

Рис. 2.43. Схемы, иллюстрирующие положения крестообразного ротора реактивного шагового двигателя при различных полярностях включения его фаз (а – в)
При малом шаге (5...10) применяют реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. Выпускаемые отечественной промышленностью реактивные редукторные шаговые двигатели имеют на статоре шесть полюсных выступов с гребенчатой зубцовой зоной.
ДВИГАТЕЛИ С ПОДМАГНИЧИВАНИЕМ (ИНДУКТОРНЫЕ)
По конструктивному исполнению и принципу работы рассматриваемые двигатели сходны с редукторными двигателями, имеющими радиальное возбуждение. Возбуждение может создаваться обмоткой постоянного тока или постоянным магнитом, находящимся на статоре, как и в редукторных двигателях. Однако в шаговых индукторных двигателях постоянная составляющая магнитного поля обычно образуется за счет особого способа включения обмоток якоря. Например, если питать фазы обмотки якоря однополярными импульсами, то за счет постоянной составляющей тока в машине возникает неподвижное в пространстве магнитное поле, намагничивающее ротор. Следовательно, при соответствующей схеме питания обмоток возбуждения реактивный шаговый двигатель может работать как двигатель с подмагничиванием.
Индукторные шаговые двигатели с подмагничиванием имеют несколько лучшие характеристики, чем реактивные: больший электромагнитный момент, лучшую устойчивость и т. п. Однако для них требуется более сложный электронный коммутатор, который загружается постоянной составляющей тока возбуждения. Наличие постоянной составляющей тока в обмотке якоря двигателя приводит к возрастанию электрических потерь мощности. Максимальная частота подачи управляющих импульсов тока у двигателей с подмагничиванием меньшая, чем у реактивных.








