 2014-02-02
2014-02-02 739
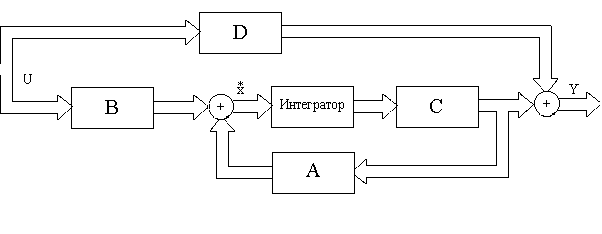
739U=(u1(t)… um(t))T
Y=(y1(t)… yp(t))T
X- вектор состояния.
x=(x1(t)… xn(t))
n – порядок дифференциального уравнения объекта.
А – матрица (nxn)
В – матрица (nxm)
C – матрица (pxn)
D – матрица (pxm)
Замечание: В рамках системы (1) чрезвычайно удобно описывать нестационарные т.е. зависящие от времени объекты. При этом матрицы A,B,C,D. Зависят от времени, что соответствует переменным коэффициентам дифференциальных уравнений.
Замечание: В системе (1), второе уравнение также можно понимать как уравнение, описывающее косвенное измерение величины x некоторым датчиком.
Системе (1) соответствует передаточная матрица, которая также пери нулевых начальных условиях может быть вычислена при помощи преобразований Лапласа.
PX=AX+BU
Y=CX+DU
(pE-A)X=BU
X=(pE-A)-1BU
Y=C(pE-A)-1BU+DU=[C(pE-A)-1B+D]U
Где [C(pE-A)-1B+D] – передаточная матрица W(p)
 |








