2014-02-02
2014-02-02 777
777Приложение
Литература
Рис. 7.8
Пусть K 1(p) = k 1, K 2(p) = k 2, k 2 > k 1. Запишем передаточную функцию замкнутой системы:
 .
.
Передаточной функции  соответствует дифференциальное уравнение
соответствует дифференциальное уравнение
 ,
,
где А = 1 + k 1 k 2 k, B = k k 2.
При единичном ступенчатом воздействии его решением будет
 .
.
Время регулирования
 .
.
Сравним tp2 и tp1 для параметров Т = 1, k = 5, k 1 = 2, k 2 = 10.
h(∞) = B / А. Δ = 0,05 h (∞) = 0, 025.
 .
.
В замкнутой системе, по сравнению с разомкнутой, время регулирования сократилось в 100 раз.
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – СПб, «Профессия», 2004. – 752 с.
2. Егоров К.В. Основы теории автоматического регулирования. – М.: Энергия, 1967. – 648 с.
3. Востриков А.С., Французова Г.А. Теория автоматического регулирования. – М.: Высшая школа, 2004. – 365 с.
4. Дорф Р., Бишоп Р. Современные системы управления. – М.: Лаборотория Базовых Знаний, 2002. – 832 с.
ПРИЛОЖЕНИЕ 1
Таблица преобразования Лапласа для некоторых
функций
| № | Оригинал | Изображение |
| f (t) | F (p) | |
| a×f (t) | a×F (p) | |
| a f 1(t) + b f 2(t) | a F 1(p) + b F 2(p) | |
 | p×F (p) | |
 |  | |
| 1(t) |  | |
| t |  | |
| t n |   | |
 |  | |
 |  | |
 | ||
| f (t - t) |  | |
 |  | |
 |  | |
 |  | |
| sin a t |  | |
 |  | |
| cos a t |  | |
 |  | |
 |  | |
 |  | |
 |  |

Системы автоматического управления называется импульсной, если между двумя (или более) ее элементами информация передается посредством прерывистых сигналов-импульсов. Импульсные САУ в ряде случаев имеют преимущество перед непрерывными САУ. Например, при регулировании медленно протекающих процессов, таких как изменение температуры в печах, котлах, нагревателях; изменение расходов и давлений газов, жидкостей. Можно осуществлять управление несколькими объектами одним регулятором, а это упрощает САУ. Так же импульсные САУ применяются и в быстрых процессах, например в радиолокаторах, системах радиотелеуправления. На принципах импульсных САУ создается специальные цифровые системы управления, обладающие высокой точностью работы.
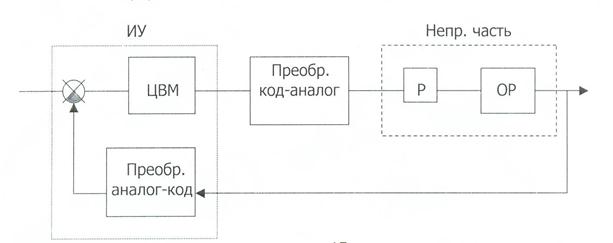
Принцип действия импульсной системы основан на совместной работе импульсного устройства с непрерывной частью. (Непрерывная часть системы работает на сигналах непрерывной формы). Для обработки импульсных сигналов ставится цифровая ЭВМ.
 Схемы соединения для разомкнутых систем показаны на рис. 8.1.
Схемы соединения для разомкнутых систем показаны на рис. 8.1.

 а. ИУ НЧ
а. ИУ НЧ


 б. НЧ ИУ НЧ
б. НЧ ИУ НЧ
в. НЧ ИУ
Рис. 8.1.
Схемы соединений без ЦВМ показаны на рис. 8.2.

 | |||
 | |||





 а. ИУ Р ОР
а. ИУ Р ОР

НЧ



 б. НЧ ИУ НЧ
б. НЧ ИУ НЧ
Рис. 8.2.
Схемы соединений для замкнутых САР следующие.
1. Импульсное устройство включается перед непрерывной частью САР:
| |||
| |||
ИУ Р ОР
непрерывная часть
Рис. 8.3.
2. Импульсное устройство включается между двух непрерывных частей САР.
НЧ ИУ НЧ
Рис. 8.4.
Если для обработки сигналов применяется цифровая вычислительная машина, требуется два преобразователя: преобразователь «аналог-код», который непрерывный сигнал кодирует для ЦВМ, и преобразователь «код-аналог», который дискретный сигнал от ЦВМ преобразует в непрерывный сигнал для непрерывной части САР.
Способы передачи сигналов можно разделить на непрерывные и дискретные. При непрерывном способе передается каждое мгновенное значение сигнала x (t), рис. 8.5. При дискретном способе передаются отдельные мгновенные значения непрерывного сигнала, рис. 8.6.

 x (t) x (t)
x (t) x (t)
 x 2 xi xn
x 2 xi xn
x 1 x 3

 0 t 0 t 1 t 2 t 3 ti tn t
0 t 0 t 1 t 2 t 3 ti tn t
Рис. 8.5. Рис. 8.6.
Представление непрерывного сигнала отдельными мгновенными его значениями называется квантованием. Непрерывный сигнал называют аналоговым. Квантование – превращение аналогового сигнала в дискретный. Осуществляют квантование по уровню, по времени, совместное. Делается это импульсными устройствами разной физической природы.
Квантование по уровню. Назначаются уровни сигнала. Непрерывный сигнал x (t) расчленяется на уровни x 1, x 2, …, как показано на рис. 8.7. И фиксируется мгновенное значение уровня сигнала в соответствующий момент времени. Промежутки времени получаются произвольными.
Квантование по времени. Назначаются промежутки времени. По истечении назначенного промежутка времени фиксируется мгновенное значение сигнала, рис. 8.8. Уровни сигнала произвольные.