 2014-02-02
2014-02-02 881
881Требования к системам автоматического регулирования
Задачи теории автоматического регулирования
С помощью методов ТАР решаются две основные задачи: задача анализа САР и задача синтеза САР. В задаче анализа известны математическое описание САР и законы изменения во времени возмущающих и управляющих воздействий. Требуется найти закон изменения во времени регулируемой величины. В задаче синтеза известны законы изменения во времени возмущающих и управляющих воздействий и требования к поведению регулируемой величины. В ряде случаев известно также математическое описание объекта регулирования. Требуется найти математическое описание регулятора с целью его технической реализации (построения, настройки и эксплуатации). Очевидно, что вторая задача значительно сложнее первой уже в силу своей неоднозначности, поскольку одинаковое поведение регулируемой величины может быть обеспечено различными регуляторами.
С чисто теоретических позиций требования к САР сводятся к требованиям точности соответствия фактического значения регулируемой величины её требуемому (заданному) значению во всех возможных условиях работы. В общей форме эти требования таковы.
1.САР должна быть как можно менее чувствительной к действию возмущений. Это означает, что при действии возмущений регулируемая величина должна как можно меньше отклоняться от её требуемого (заданного) значения.
2.САР должна как можно лучше реагировать на управляющее воздействие. Это значит, что при поступлении на неё сигналов управления она должна обеспечить быстрый и точный переход регулируемой величины к новому заданному значению.
Очень часто одновременное удовлетворение этих требований либо весьма затруднительно, либо вообще невозможно. Поэтому нередко приходится принимать определённые компромиссные решения.
Система автоматического регулирования может находиться в одном из двух режимов работы: статическом либо динамическом.
Статический, или установившийся, режим имеет место тогда, когда воздействия на систему (как возмущающие, так и управляющие) не изменяются во времени. При этом на объекте регулирования наблюдается равенство подвода и отвода энергии либо вещества, обусловливающее неизменность во времени регулируемой величины. Типичный пример – работа САР частоты вращения вала главного судового двигателя при движении в штилевых условиях и неизменном положении органов управления. Частота вращения вала при этом постоянна.
Свойства САР в статике принято иллюстрировать с помощью статических характеристик. Это зависимости регулируемой величины от возмущения (статическая характеристика режима возмущения) и от управляющего воздействия (статическая характеристика режима управления), снятые на различных установившихся режимах:
y = f (z); y =f (u).
Типичный вид такой характеристики показан на рис.1.11.
 |
Рис.1.11 Статическая характеристика САР
Важной величиной, содержащейся в статической характеристике и несущей информацию о точности САР установившихся режимах, является неравномерность регулирования
Δ = ymax - ymin.
Это диапазон изменения регулируемой величины, соответствующий полному диапазону изменения возмущения. Чем меньше эта величина, тем точнее работает САР в статике. Часто используется отношение неравномерности регулирования к среднему значению регулируемой величины
d = D / у ср ,
которое называется степенью неравномерности и обычно выражается в процентах. В зависимости от конкретной системы степень неравномерности может быть больше или меньше, может быть и равной нулю. В последнем случае система на всех установившихся режимах поддерживает строго одно и то же значение регулируемой величины. Такие САР называют астатическими в отличие от статических, которым свойственно ненулевое (хотя, может быть, и весьма малое) значение степени неравномерности. Несмотря на то, что астатические САР в отношении точности поддержания регулируемой величины в статике превосходят статические, последние широко применяются по причине их простоты и меньшей стоимости.
Динамический режим, иначе называемый переходным процессом, возникает тогда, когда воздействие на систему изменяется во времени. При этом на объекте регулирования возникает небаланс подвода и отвода энергии либо вещества и, как следствие, происходит изменение во времени регулируемой величины. Пример – работа САР частоты тока судовой электростанции при включении дополнительных потребителей электроэнергии.
Динамической характеристикой САР (рис.1.12) называется зависимость регулируемой величины от времени при некоторых заранее оговоренных формах внешних воздействий y = f (t).
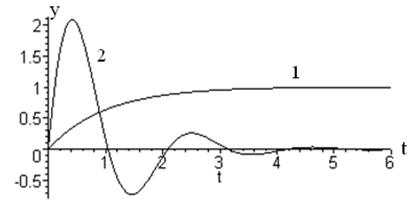
Рис. 1.12 Динамические характеристики САР.
1 – статической САР,
2 – астатической САР.
Эта характеристика несёт дополнительную информацию о динамических свойствах системы, которая часто играет определяющую роль. Именно здесь проявляется роль регулятора, тогда как в установившемся режиме, когда нет причины изменения регулируемой величины, достаточно вручную задать объекту регулирования желаемый режим работы.








