 2014-02-24
2014-02-24 3263
3263Глава 1. Геометрия на плоскости
Прямая, на которой указано направление, начало отсчета и масштаб называется числовой осью. Прямоугольная (декартова) система координат на плоскости состоитиз двух взаимно перпендикулярных числовых осей, пересекающихся в точке O – начале системы координат. Горизонтальную ось называют осью абсцисс, а вертикальную - осью ординат.
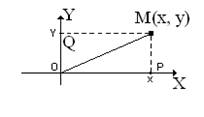
Каждой точке плоскости M сопоставляется ориентированный отрезок OM (радиус-вектор с началом в точке О и концом в точке M. Спроектируем точку М на оси координат (рис.1.1). Каждой точке плоскости M сопоставляется упорядоченная пара чисел (х,y), которые называются декартовыми координатами точки М(х,у). В любой системе координат существует взаимнооднозначное соответствие между точкой и ее координатами. На плоскости расстояние d между двумя точками M(хi,yi) и N(xj,yj) измеряется по прямой и вычисляется по формуле длины вектора
d2 = (xi - xj)2 + (yi - yj)2
или (1.1)
 .
.
Пример. Найти расстояние d между двумя точками M(-3,4) и N((5.2). Согласно формуле (1.1) имеем
 .
.
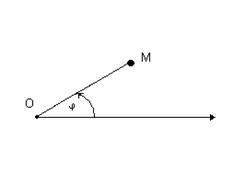
Полярная система координат. Выберем на плоскости фиксированную точку O, называемую полюсом, и исходящую из нее полуось OP, называемую полярной осью. На полярной оси указываем единицу масштаба. В этой системе координат (рис.1.2) положение точки M задается ее расстоянием r до полюса (т.е. длиной отрезка OM, называемого полярным радиусом точки M) и углом j, который составляет полярный радиус с полярной осью (положительный отсчет угла идет против часовой стрелки), причем -p < j  p или 0 j <2p. Числа r и j называются полярными координатами точки М(r, j).
p или 0 j <2p. Числа r и j называются полярными координатами точки М(r, j).
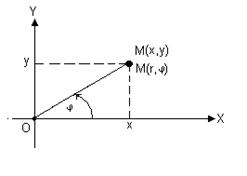
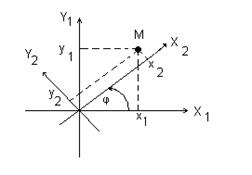
Если на плоскости заданы прямоугольная и полярная системы координат, причем начало координат и положительная часть оси абсцисс совпадают с полюсом и осью полярной системы координат (рис.1.3), то декартовы и полярные координаты точки М связаны м соотношением
х = r cosj y = r sinj. (1.2)
Формулы (1.2) выражают координаты точки M в прямоугольной системе через ее же координаты в полярной системе. Отсюда
х2 + y2 = r2(cos2j+ sin2 j)= r2  . (1.3)
. (1.3)
tgj =  . (1.4)
. (1.4)
|
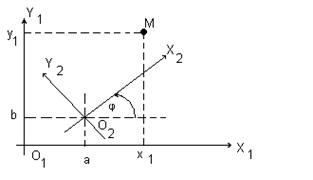
Преобразование системы координат. Пусть даны две прямоугольные системы координат X1Y1 и X2Y2 (рис.1.4 а). Найдем связь координат точки M(x1,y1) в одной из систем координат с ее же координатами (x2,y2) в другой системе. Для этого вначале совместим начала координат, сохраняя старые направления осей (рис.1.4 б), потом одну из систем повернем так, чтобы оси совпали направления координат.
Параллельный перенос системы координат. В первой системе координат точка O1 имеет координаты (0,0), точка O2 - (а,b), а точка M - (x1,y1). Рассматривая проекции этих точек на оси координат первой системы имеем
х1 = а + x2, y1 = b + y2. (1.5а)
|
Чтобы получить координаты во второй системе, необходимо провести обратные действия. Это приведет к зависимостям
x2 = x1 - a. y2 = y1- b. (1.5 б)
Поворот системы координат с совмещенной точкой начала. Пусть оси OX1 и OX2 повернуты на угол j. Из рис. 1.4 б следуют соотношения
x1 = x2cosj - y2 sinj (1.6)
y1 = x2 sinj - y2 cosj.
В общем случае связь между координатами точки в различных прямоугольных системах координат выражается линейными соотношениями
х1 = х2cosj - y2 sinj + a
y1 = x2 sinj + y2 cosj + b (1.7)
или
x2 = x1 cosj + y1 sinj - a
y2 = -x1 sinj + y1 cosj - b.
Пример. Как изменятся координаты точки M(-2,3), если система будет повернута на 300 и сдвинута вверх на две единицы?
Применяя формулы (1.7) для x1= -2, y2 = 3, угла j = 300, а =0 и b = 2, имеем
x2 = -2cos300 + 3sin300 = -2  + 3
+ 3  =
=  -
- 
y2 = 2sin300 +3cos300 - 2 = 2 + 3 -2 =  - 1
- 1

