 2015-01-22
2015-01-22 2739
2739Для получения наибольшей производительности, точности обработки или иных показателей исполнительный орган производственного механизма должен вращаться или перемещаться поступательно с соответствующей этому оптимальному режиму скоростью. В связи с этим возникает необходимость принудительного регулирования скорости исполнительного органа в соответствии с технологическими требованиями. В недалеком прошлом регулирование скорости осуществлялось с помощью коробок скоростей, механических вариаторов и т. п.
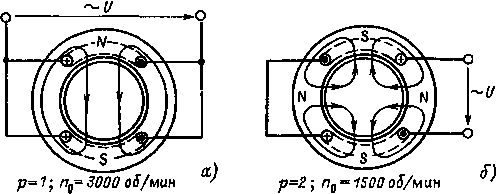
Рис. 10.25 Схема соединения обмотки статора двухскоростного асинхронного двигателя при двух ( а ) и четырех ( б ) полюсах
Перечисленные способы имеют ряд существенных недостатков, одним из которых является усложнение кинематики механизма, другим — ступенчатое регулирование и т.п. По этой причине в настоящее время стали широко использовать регулировочные свойства двигателя — регулирование скорости механизма путем изменения частоты вращения двигателя, что привело к значительному упрощению кинематики устройства и управления, удешевлению механизма, осуществлению плавного регулирования скорости.
Рассмотрим вначале возможные способы регулирования частоты вращения ротора асинхронного двигателя с короткозамкнутым ротором. Как известно, частота вращения ротора в нормальном режиме работы несколько меньше (на 2 — 8%) частоты вращения магнитного поля. Поэтому изменение частоты вращения магнитного поля вызывает изменение в той же степени и частоты вращения ротора двигателя.
Из выражения частоты вращения магнитного поля
n 0 = 60 f 1/ р
вытекают два наиболее распространенных способа регулирования частоты вращения 1) изменением числа пар полюсов р; 2) изменением частоты f 1 напряжения источника
Регулирование изменением числа пар полюсов осуществляется изменением схемы соединения обмотки статора с помощью переключателя. Обмотка каждой фазы двухскоростного асинхронного двигателя состоит из нескольких частей, которые соединяются между собой параллельно или последовательно. В результате образуются разные числа пар полюсов. На рис 10.25, а изображена обмотка одной фазы статора, имеющая две части, которые соединены между собой параллельно, на рис 10.25, б — последовательно.
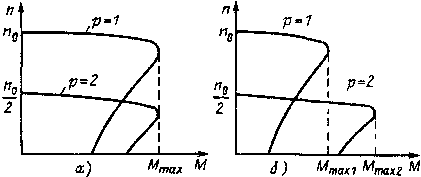
Рис. 10.26 Механические характеристики двухскоростного асинхронного двигателя с короткозамкнутой обмоткой ротора с постоянным моментом Мmax ( а ) и постоянной мощностью ( б )
Рассмотрев картины магнитного поля, созданного током обмотки одной фазы статора для какого-то момента времени, легко убедиться, что на рис. 10.25, а обмотка образует р = 1, а на рис. 10.25, б - р = 2 пар полюсов. Обмотки статора двух других фаз, сдвинутые в пространстве на электрический угол в 120°, соединяются так же, как и первая. Результирующее магнитное поле, естественно, будет иметь столько же пар полюсов, сколько и поле, созданное одной фазой обмотки. Необходимо заметить, что никаких переключений обмотки ротора не производится: ток обмотки ротора всегда образует столько пар полюсов, сколько их создано обмоткой статора. Рассмотренный способ дает возможность получить только две скорости, отличающиеся по значению в 2 раза, что является его существенным недостатком.
Отечественная промышленность выпускает двухскоростные асинхронные двигатели со следующими частотами вращения магнитных полей: 3000/1500; 1500/750; 1000/500 об/мин и др. Механические характеристики двухскоростного двигателя изображены на рис. 10.26. Значения максимальных моментов будут равными (рис. 10.26, а), если равны магнитные потоки двигателя для первого и второго способов соединения обмоток, в противном случае (рис. 10.26, б) они не равны. Как следует из выражения
U 1ф ≈ E 1ф = 4,44 w 1 f 1Ф k 01,
магнитные потоки будут равными, если остается неизменным отношение U 1ф/ f 1 для первой и второй схем соединения обмоток.
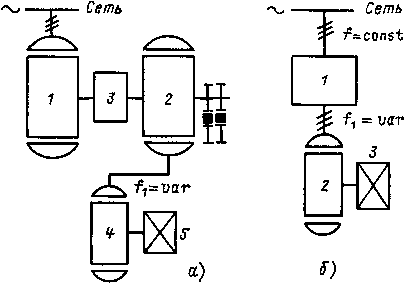
Рис. 10.27. Структурная схема частотного регулирования скорости асинхронного двигателя с короткозамкнутым ротором с машинным ( а ) и статическим ( б ) преобразователями частоты
Трехскоростные и четырехскоростные двигатели имеют по две независимые обмотки статора, одна из которых образует две скорости, а другая в трехскоростном двигателе — одну, в четырехскоростном двигателе — две скорости. Могут быть двигатели со следующими частотами вращения n 0: трехскоростные - 1500/1000/750, 1000/750/500 об/мин; четырехскоростные - 3000/1500/1000/500, 1500/1000/750/500 об/мин.
Для регулирования частоты вращения ротора изменением частоты тока статора необходимо иметь отдельный источник или преобразователь энергии с регулируемой частотой. До последнего времени в качестве источника энергии использовались синхронные, асинхронные или индукционные генераторы. При этом установка (рис. 10.27, а) состояла из нескольких машин: приводного асинхронного или синхронного двигателя 1, работающего с постоянной частотой вращения синхронного генератора 2, механического или электрического регулятора скорости 3, асинхронного двигателя 4 и исполнительного механизма 5. Частота f 1 напряжения в обмотке статора синхронного генератора равна
f 1 = рn /60.
При изменении частоты вращения синхронного генератора изменяется частота f 1 и, следовательно, частота вращения ротора асинхронного короткозамкнутого двигателя 4 и исполнительного механизма 5. На рис. 10.28 изображены механические характеристики асинхронного двигателя при частотном регулировании скорости. Предполагается, что с изменением частоты в такой же степени изменяется и напряжение, а их отношение U 1ф/ f 1остается постоянным. Такой способ позволяет получить широкий диапазон и плавное регулирование частоты вращения, однако он имеет плохие технико-экономические показатели: низкий КПД, большие капитальные вложения и т. п., поэтому применяется редко.
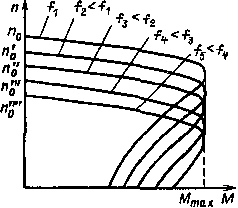
Рис. 10.28. Механические характеристики асинхронного двигателя при частотном регулировании скорости
В настоящее время разработаны статические преобразователи частоты на тиристорах, обладающих высокими технико-экономическими показателями. Структурная схема такой установки изображена на рис. 10.27, б. Здесь 1 — статический преобразователь, 2 — асинхронный двигатель, 3 — исполнительный механизм.
Существуют также другие, мало распространенные способы регулирования частоты вращения короткозамкнутого двигателя, например изменением напряжения на обмотке статора. В качестве регулятора используется индуктивное регулируемое сопротивление, включенное в цепь обмотки статора (например, силовой магнитный усилитель).
Регулирование частоты вращения ротора асинхронного двигателя с фазным ротором в большинстве случаев осуществляется путем введения в цепь обмотки ротора дополнительного сопротивления (см. рис. 10.23).
Как следует из (10.55) и (10.56), добавочное сопротивление в цепи обмотки ротора увеличивает критическое скольжение s кр и не влияет на значение максимального момента M max. Искусственные (реостатные) характеристики двигателя рассчитывают с помощью уравнения (10.62).
На рис. 10.29 сплошными линиями изображены естественные и искусственные механические характеристики асинхронного двигателя для различных значений добавочных сопротивлений в цепи обмотки ротора. Из кривых следует, что при заданном моменте на валу М с частота вращения ротора на каждой механической характеристике будет разной (п 1, n 2, n 3).
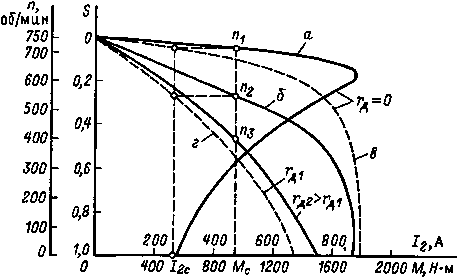
Рис. 10.29. Естественные и искусственные (реостатные) механические характеристики, а также зависимости тока ротора от скольжения асинхронного двигателя с контактными кольцами
ля выбора регулировочного и пускового реостатов по нагреву необходимо знать значения токов в роторной цепи двигателя. Для определения тока используют тот факт, что ток ротора определяется моментом двигателя и не зависит от значения добавочного сопротивления в цепи обмотки ротора. Например, моменту М с (рис. 10.29) на естественной и искусственной характеристиках соответствует один и тот же ток I 2с. Это положение можно доказать аналитически.
Момент, развиваемый двигателем, равен:
на естественной характеристике
| M = | 3 I 22 r 2 | , |
| ω0 s |
на искусственной характеристике
| M и = | 3 I 2и2(r 2 + r д) | . |
| ω0 s и |
Допустим, что М = М и = М с. Тогда
| 3 I 22 r 2 | = | 3 I 2и2(r 2 + r д) | , |
| ω0 s | ω0 s и |
или
| I 22 | = | s | (r 2 + r д) | , | |
| I 2и2 | s и | r 2 |
Выразив s/sи через сопротивления цепи ротора, получим
| I 22 | = | r 2(r 2 + r д) | = 1. |
| I 2и2 | (r 2 + r д) r 2 |
К недостаткам реостатного способа регулирования частоты вращения относятся значительные потери энергии в регулировочном реостате, малая жесткость механических характеристик: небольшое изменение момента на валу вызывает значительное изменение частоты вращения, а также невозможность получения плавного регулирования. Рассмотренный способ используется в системах, где работа на реостатных характеристиках непродолжительна.
Пример 10.2. Рассчитать и построить естественную и искусственную механические характеристики, а также зависимости тока ротора от скольжения асинхронного двигателя с фазным ротором при r д = 0,08 Ом.
Паспортные данные двигателя: Р ном = 60 кВт, n ном = 720 об/мин, Mmax /M ном = λ = 2,2, E 2к = 175 В, I 2ном = 216 А.
Решение. Естественная и искусственная механические характеристики рассчитываются и затем строятся на основании уравнений (10.57) и (10.62):
| M = | 2 Mmax | и М и = | 2 Mmax |
| s кр/ s + s / s кр | s кр,и / s и + s и/ s кр,и |
Значения Mmax, s кр , s кр,и определяются из (10.58а), (10.58), (10.65), а r 2, входящее в (10.65), — из (10.59а). После подстановки паспортных данных в указанные формулы получим Mmax = 1760 Н•м, s кр = 0,166, s кр,и = 0,88, r 2 = 0,0187 Ом, s = 0,04.
Подставляя значения s (например, 0,004; 0,1; 0,2; 0,4; 0,6; 0,8; 1) в уравнения (10.57) и (10.64), определяем соответствующие им значения М и М и. Результаты расчета сводим в таблицу.
Механические характеристики n (М), s (M), построенные по результатам расчета, изображены на рис. 10.29 сплошными линиями (а - при r = 0, б - при r д = 0,08 Ом).Зависимость I 2 от s определяется из (10.59):
| I 2 = | √ | M ω0 s | при r д = 0; I 2и = | √ | M иω0 s и | при r д ≠ 0 |
| 3 r 2 | 3(r 2 + r д) |
Подставляя в (10.59) значения s, s и соответствующие им значения М и М и из упомянутой выше таблицы определяют I 2 и I 2и. Результаты расчета заносят в таблицу. На рис. 10.29 пунктирными линиями изображены построенные по результатам расчета графики I 2 и I 2и (график в — для r = 0, график г — для r д = 0,08 Ом).
Пример 10.3. Определить сопротивление, которое нужно включить в цепь ротора, чтобы двигатель вращался с частотой n = 650 об/мин и развивал момент М = 200 Н • м.
Паспортные данные двигателя: Р ном = 22 кВт, U ном = 380/220 В, n ном = 723 об/мин, Мmax / М ном = λ = 3, E 2к = 197 В, I 2ном = 70,5 А.
Решение. Искомое значение r д определяется из (10.65):
r д = r 2(s кр,и/ s кр -1).
Значения r 2, s кр, s кр,и определяются из (10.59а), (10.58) и (10.62), в котором М и = 200 Н•м, Мmax — из (10.58а), s и = (n 0 - n и)/ n 0 , где n = 650 об/мин.
После подстановки в указанные формулы соответствующих значений паспортных данных двигателя получим: r 2 = 0,0582 Ом, s ном = 0,036, Мmax = 873 Н•м, s кр = 0,21, s и = 0,133, s кр,и = 1,15, r д= 0,26 Ом.

