 2015-02-04
2015-02-04 2821
2821ния
Эта схема (рис. 103, б) отличается от рассмотренной выше наличием второго по-
ста управления, состоящего из кнопок SB3 «Пуск» и SB4 «Стоп».
Следует обратить внимание, что контакты обеих кнопок «Пуск» включены парал-
лельно друг другу, а кнопок «Стоп» - последовательно.
Такое включение кнопок позволяет включить двигатель при нажатии любой кноп-
ки – SB1 или SB3, и остановить двигатель нажатием кнопки SB2 или SB4.
Местное и дистанционное управление электроприводами. Правила Регистра
Местным называется управление электроприводом при помощи кнопочного поста
управления, находящегося в непосредственной близости от электропривода.
Дистанционным называется управление электроприводом при помощи кнопочно-
го поста управления, находящегося на некотором удалении от электропривода.
Управление с двух постов применяют для электроприводов ответственных прием-
ников электроэнергии – рулевых приводов, некоторых насосов и вентиляторов.
Например, по Правилам Регистра, пуск и остановка электродвигателей привода
руля должны осуществляться из румпельного отделения (местное управление) и из руле-
вой рубки (дистанционное управление).
В некоторых случаях пост дистанционного управления может состоять только из
одной кнопки «Пуск» или «Стоп».
Например, электродвигатели погружных осушительных и аварийных пожарных насосов должны иметь устройства дистанционного пуска, расположенные выше палубы переборок. Значит, пост дистанционного управления состоит из кнопки «Пуск». Этот
пост может находиться в рулевой рубке.
В то же время электродвигатели топливных и маслоперекачивающих насосов и се-
параторов топлива и масла должны отключаться дистанционно из мест, находящихся вне помещений этих насосов и вне шахты машинного отделения, но в непосредственной близости от этих помещений. Такой пост дистанционного управления состоит из кнопки «Стоп». Этот пост обычно располагается в коридоре при входе в машинное отделение.
Такое расположение постов дистанционного управления:
1. сводит к минимуму время, необходимое для включения или отключения электро-
привода (не надо спускаться в машинное отделение) и тем самым способствует повыше-
нию живучести судна при затоплении судовых помещений или пожаре в машинном отде-
лении;
2. исключает необходимость нахождения человека в машинном отделении, у поста местного управления, в условиях пожара в этом отделении или его частичного затопле-
ния.
18. Прочитать и объяснить работу структурной схемы авторулевого;
Отклонение судна от заданного курса воспринимается гирокомпасом ГК (рис. 10.32), который через датчик повернет ротор сельсина-приемника курса СП.
Последний через необратимую передачу НП поворачивает вал механического дифференциала МД. На второй вал механического дифференциала от штурвала подает-
ся заданное значение курса α  . На выходном (третьем) валу МД получается разность между заданным и истинным значениями курса, которая характеризуется углом откло-
. На выходном (третьем) валу МД получается разность между заданным и истинным значениями курса, которая характеризуется углом откло-
нения отзаданного курса α.
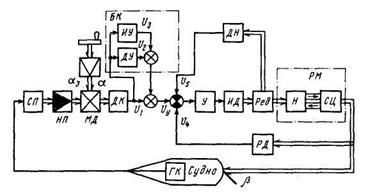
Рис. 10.32. Структурная схема авторулевого
Выходной вал МД поворачивает датчик курса ДК, который вырабатывает напряже
ние
U  = k α (10.11),
= k α (10.11),
пропорциональное углу рассогласования судна по курсу. Это напряжение являет-
ся основным управляющим сигналом.
Два других управляющих сигнала вырабатываются в блоке коррекции БК, вклю-
чающем в себя дифференцирующее ДУ и интегрирующее ИУ устройства.
Дифференцирующее устройство вырабатывает сигнал
U  = k d α/ d t (10.12),
= k d α/ d t (10.12),
пропорциональный скорости отклонения от заданного курса. Сигнал этого устройства
предназначен для компенсации энергии поворота судна, т. е. для уменьшения его инер
ции путем отрицательной закладки руля.
Сигнал, вырабатываемый интегрирующим устройством, пропорционален инте
гралу от угла отклонения судна по времени
U  = k
= k  (10.13),
(10.13),
Этот сигнал возникает при появлении внешних несимметричных сил (волны, ветра) и делает кладки пера руля несимметричными. Тем самым компенсируется снос судна с курса в результате действия односторонних сил.
Таким образом на входе усилителя У суммируются 3 сигнала (пропорциональный углу отклонения судна, его производной и интегралу), образуя напряжение управления
U  = k α+ k d α/ dt + k (10.14),.
= k α+ k d α/ dt + k (10.14),.
Поэтому закон регулирования напряжения U в сокращенном виде записывают так ПИД. Это означает, что напряжение управления имеет 3 составляющие - пропорциональ
ную (П) в виде напряжения U , интегральную (И) в виде напряжения U , идифферен
циальную (Д) в виде напряжения U .
Напряжение управления U подается на вход усилителя У, откуда усиленный сиг-
нал поступает на исполнительный двигатель ИД, который поворачивает управляющий орган насоса Н рулевой машины РМ.
Насос рулевой машины в соответствии с положением управляющего органа при
водит в движение поршни силовых цилиндров СЦ, которые будут поворачивать руль на угол β.
При повороте руля приходит в движение рулевой датчик РД, имеющий механи-
ческую связь с баллером, вырабатывающий сигнал отрицательной обратной связи
U  = k β (10.15),.
= k β (10.15),.
Этот сигнал вычитается из управляющего сигнала, а поэтому ограничивает угол перекладки руля и вместе с сигналом U обеспечивает удержание судна на заданном кур
се (по закону незатухающих колебаний).
Исполнительный двигатель ИД связан с управляющим органом насоса через исполнительный механизм. В зависимости от типа РМ в комплект авторулевого может входить исполнительный механизм ИМ-1 или ИМ-2.
В приборе ИМ-1 выходной валик имеет вращательное движение на некоторый угол ε, а в приборе ИМ-2 выходной валик совершает поступательное перемещение на некоторую величину l.
Значение смещения определяет подачу насоса, а соответственно и скорость пере
кладки руля. Таким образом,
ε = kdβ/dt (10.16) ,,
поэтому датчик ДН обратной связи по насосу, механически связанный с ИД, выра
батывает сигнал
U  = k kdβ/d (10.17),
= k kdβ/d (10.17),
Этот сигнал отрицательной обратной связи вычитается из управляющего сигна-
ла и служит для уменьшения автоколебаний пера руля.
Процесс управления судном для удержания его на заданном курсе можно представить следующим образом.
При отклонении судна от заданного курса выработанный авторулевым управля-
ющий сигнал поступает через усилитель на ИД. Последний приводит в движение управ-
ляющий орган и датчик ДН, вырабатывает сигнал U , который вычитается из управляю-
щего сигнала усилителя.
Когда при определенном смещении управляющего органа насоса значение сигна-
ла отрицательной обратной связи станет равным управляющему сигналу на входе уси-
лителя, разность напряжений станет равной нулю, а следовательно, и напряжение, подаваемое на ИД, тоже станет равным нулю.
Двигатель остановится, а управляющий орган насоса будет повернут на опреде-
ленный угол. Насос рулевой машины в соответствии с управляющим органом приведет в движение поршни СЦ рулевой машины, которые будут поворачивать руль.
При повороте руля рулевой датчик РД вырабатывает сигнал U , который вычитается из управляющего сигнала усилителя.
Поскольку в рассматриваемый момент разность сигналов на усилителе была рав-
на нулю, то под действием сигнала обратной связи РД усилитель будет вырабатывать напряжение противоположной фазы, ротор ИД будет вращаться в обратную сторону и перемещать управляющий орган насоса к нулевому положению.
При этом сигнал U обратной связи датчика ДН насоса будет соответственно уменьшаться.
Когда управляющий орган насоса вернется в нулевое положение, рулевая маши-
на прекратит движение, руль остановится в определенном положении, сигнал датчика ДН будет равен нулю, сигнал датчика РД будет равен по значению управляющему напря
жению U и противоположен по знаку. Разность сигналов на входе усилителя опять бу-
дет равна нулю.
Под действием момента, создаваемого рулем, судно начнет возвращаться на за-
данный курс и в связи с этим значение управляющего напряжения U уменьшается. Это приводит к нарушению равенства сигналов и под действием напряжения, определяемого полярностью сигнала U рулевого датчика, ИД начинает смещать регулирующий орган насоса в противоположную сторону.
В результате обеспечивается возврат руля в диаметральную плоскость, когда судно оказывается на заданном курсе.
19. Прочитать и объяснить работу обобщенной разомкнутой системы ручного управления РЭГ-приводом;
Изменение направления подачи масла от насоса на рулевую машину, необходимое для перекладки руля, производится специальным управляющим устройством – сервомеханизмом.
В РЭГ-приводах с насосами постоянной подачи оконечный каскад сервомеханизма представляет собой дросселирующий золотник, посредством которого насос связывается с рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через промежуточный гидроусилитель.
В приводах с насосами переменной подачи сервомеханизм включает в себя электрический двигатель - серводвигатель, связанный через кинематическую передачу с манипулятором насоса.
Весьма часто в состав управляющей кинематики включают гидроусилитель, что существенно снижает мощность электрического серводвигателя.
Напомним, что при простом управления в качестве органов управления используют кнопки «Лево руля», «право руля» или рычаг управления («джостик»).
Руль перекладывается все то время, пока нажата одна из кнопок или рычаг вы
веден из нейтрального положения. Перекладка прекращается, если отпустить кнопку или вернуть рукоятку поста в исходное - нулевое положение.
Об угловом состоянии руля в каждый момент времени судят по рулевому указателю - аксиометру.
Обобщенная разомкнутая схема ручного управления рулем по времени показана на рис. 10.17.
Здесь представлены: РМ - рулевая машина; Н - насос переменной подачи (ГЗ - гидрозолотник в системе управления с насосом нерегулируемой подачи); ГУ – гидроусили
тель; СР - серводвигатель; У - электрический усилитель.
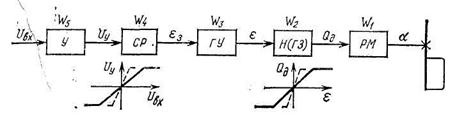
Рис. 10.17. Обобщенная разомкнутая система ручного управления РЭГ-приводом
При простом управлении рулем контур регулирования разомкнут. При подаче управляющего напряжения U  последовательно отрабатывают все звенья и начинается перекладка руля.
последовательно отрабатывают все звенья и начинается перекладка руля.
Шток поршня гидроусилителя ГУ жестко связан с манипулятором насоса Н. Перемещение манипулятора ограничено. Поэтому пропорциональность между движением золотника гидроусилителя и ходом его поршня характерна только при сравнительно малых перемещениях.
При снятии управляющего напряжения U серводвигатель СР останавливается, но подача насоса Н не прекращается.
Для остановки руля необходимо, чтобы серводвигатель включением в обратную сторону сместил манипулятор насоса в исходное положение. Таким образом, разовая перекладка руля содержит четыре операции:
1. включение серводвигателя;
2. его остановку;
3. включение серводвигателя в обратном направлении;
4. его остановку.
Поворот руля на заданный угол описанным способом даже опытному оператору (например, рулевому матросу) выполнить практически невозможно.
Для нормальной работы требуется, чтобы при снятии входного управляющего сигнала U = 0 серводвигатель занимал исходное положение, что соответствует прекращению подачи масла на рулевую машину.
В некоторых современных отечественных схемах управления (АТР, АИСТ) это делается специальным пружинным нуль-установителем, задача которого вернуть серводвигатель или, точнее, золотник гидроусилителя ГУ в нулевое положение (е  = 0) после отключения.
= 0) после отключения.
Иностранные фирмы часто используют сервопривод с электромагнитным управлением. Золотник такого привода всегда имеет пружинный самовозврат.
Таким образом, простое управление рулем по структурной схеме рис.10.17 принципиально возможно.
Для этого требуется только, чтобы элементы сервопривода автоматически возвращались в исходное положение после отключения серводвигателя.
20. Прочитать и объяснить работу структурной схемы следящего управления РЭГ-приводом с механической обратной связью;
Изменение направления подачи масла от насоса на рулевую машину, необходимое для перекладки руля, производится специальным управляющим устройством – сервомеханизмом.
В РЭГ-приводах с насосами постоянной подачи оконечный каскад сервомеханизма представляет собой дросселирующий золотник, посредством которого насос связывается с рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через промежуточный гидроусилитель.
В приводах с насосами переменной подачи сервомеханизм включает в себя электрический двигатель - серводвигатель, связанный через кинематическую передачу с манипулятором насоса.
Весьма часто в состав управляющей кинематики включают гидроусилитель, что существенно снижает мощность электрического серводвигателя.
Напомним, что при следящем управления в качестве органа управления используют штурвал поста управления в рулевой рубке.
При повороте штурвала на определенный угол в необходимую сторону (влево или вправо относительно нулевого положения) перо руля повернется на такой же (или пропорциональный) угол и автоматически остановится.
Иначе говоря, перо руля повторяет поворот штурвала, как бы следит за движением штурвала, отсюда название – следящее управление.
При этом угол поворота пера руля тем больше, чем больше угловое расстояние (угловой путь), описанное штурвалом, отсюда второе название – управление по пути.
Из сказанного следует, что у каждому положению штурвала после отработки соответствует определенное положение руля.
Таким образом, следящее управление является полуавтоматическим – на первом этапе управления участвует человек (поворачивает вручную штурвал), на втором этапе используются элементы автоматики (сельсин-датчик руля в румпельном отделении), обеспечивающие автоматическую (без участия человека) остановку руля.
Аксиометр является средством дополнительного контроля положения руля.
Система следящего управления может быть создана путем замыкания входа и выхода разомкнутой системы (рис. 10.16) через соответствующие преобразующие устройства.
Внутри следящего контура оказываются последовательно включенными два интегрирующих звена СР и РМ. Такие системы являются структурно неустойчивыми. Для придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой обратной связью.
Широко распространены схемы (рис. 10.18), где обратной связью охвачены два звена: рулевая машина РМ и насос регулируемой подачи.
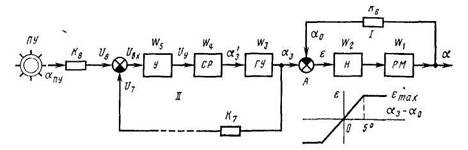
Рис. 10.18. Структурная схема следящего управления РЭГ-приводом с механической обратной связью
Образование внутреннего следящего контура превращает интегрирующее и апериодическое звенья, характерные для гидравлического привода, в обобщенное колебательное звено, передаточная функция которого имеет следующий вид:
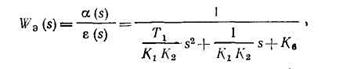
где К  — коэффициент усиления обратной связно масштабно увязывающий воздействие на подачу насоса со стороны руля и со стороны усилителя.
— коэффициент усиления обратной связно масштабно увязывающий воздействие на подачу насоса со стороны руля и со стороны усилителя.
Решение характеристического уравнения, соответствующего данной передаточной функции, показывает, что при соблюдении условия 4T K K K < 1 оба корня уравнения будут отрицательными и вещественными, поэтому движение руля при управления со стороны сервопривода будет носить апериодический характер.
При обратном соотношении в рулевом электроприводе возникают автоколебания, т.е. перо руля даже в отсутствие управляющего сигнала совершает самопроизвольные колебания влево-вправо по отношению к диаметральной плоскости судна.
Для подавления автоколебаний в схему управления рулевым электроприводом вводят отрицательную обратную связь по выходному напряжениию, при помощи которой часть сигнала (напряжения) с выхода оконечного каскада усилителя подают в противофазе на вход усилителя.
В результате коэффициент усиления усилителя по напряжению (а значит, и по мощности) уменьшается, но достигается главное – исчезают автоколебания пера руля.
При подаче сигнала α на вход суммирующего устройства А баллер руля повернется на соответствующий угол α.
Таким образом, задача следящего управления рулем превращается в задачу синфазного поворота поста управления ПУ и выходного органа сервомеханизма (СР, ГУ) α .
Общая схема следящего управления рулем распадается на два независимых замкнутых контура I и II.
Поворот поста управления ПУ на некоторый угол вызывает перемещение выхода сервомеханизма на тот же угол, что в свою очередь определит угол перекладки руля. Элементы К  и К
и К  являются преобразователями углового поворота в эквивалентные электрические сигналы.
являются преобразователями углового поворота в эквивалентные электрические сигналы.
При углах перекладки α = α -а  > 5°, поворот манипулятора насоса ограничивает-
> 5°, поворот манипулятора насоса ограничивает-
ся (ε  ).
).
Движение же задающего органа α может продолжаться из-за наличия специаль-
ной аккумулирующей пружины. Следовательно, при больших углах перекладки насос работает с максимальной подачей и начинает снижать ее за 5° до подхода к заданному положению.
При разомкнутом контуре II возможно простое управление рулем.
Постом управления непосредственно на вход усилителя подается управляющий сигнал. Серводвигатель СР через ГУ или, в случае его отсутствия, через кинематический механизм перемещает на некоторый угол α задающий элемент, угол поворота которого после отработки определит положение руля.
Контроль перекладки производится по двухстрелочному аксиометру заданного и действительного положения руля. Датчики аксиометра связаны соответственно с заданным α и фактическим α углами поворота пера руля. Отключение серводвигателя производится по достижении α требуемого значения.
21. Прочитать и объяснить работу функциональной схемы электропривода подруливающего устройства с ВРШ;
К основным деталям устройства относятся (рис. 10.34):
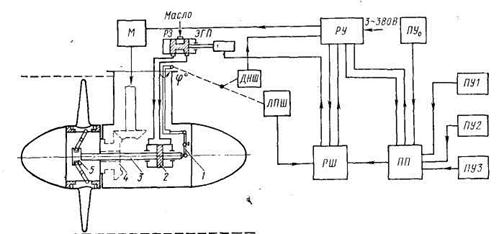
Рис. 10.34. Функциональная схема электропривода подруливающего устрой-
ства с ВРШ
ЛПШ – линейный преобразователь шага, для преобразования угла поворота лопастей винта в пропорциональное напряжение;
ДНШ – датчик нулевого шага, представляет собой конечный выключатель, контакты которого замкнуты только при нулевом шаге лопастей винта;
М – приводной электродвигатель винта, для вращения винта;
ПП – переключатель постов управления;
ПУ1- пост управления на крыле левого борта;
ПУ2 – то же, в рулевой рубке;
ПУ3- то же, на крыле левого борта;
ПУ0 – то же, в ЦПУ;
РУ – распределительное устройство (щит электропитания);
РШ – регулятор шага винта, для выработки напряжения,;
ЭГП – электрогидравлический преобразователь;
РЗ – распределительный золотник;
1 – рычаг, для передачи информации о положении лопастей в ЛПШ и ДНШ;
2 – сервомотор, для создания усилия, поворачивающего лопасти винта;
3 – шток сервомотора, для передачи усилия от поршня сервомотора 2 к кондуктору 5;
4 – коническая зубчатая передача, для передачи вращающего момента электродвигателя на ступицу винта (т.е. для вращения винта);
5 – кондуктор, устройство для непосредственного разворота лопастей винта.

