 2015-03-22
2015-03-22 944
944Рассмотрим на примере:
Пусть на вход системы воздействуют случайные процессы  с корреляционной функцией
с корреляционной функцией
 и
и  с
с 
Корреляционную функцию  имеет, в частности, случайный процесс, у которого моменты изменения и уровни случайны.
имеет, в частности, случайный процесс, у которого моменты изменения и уровни случайны.
t1 t
Требуется получить квазиоптимальные передаточные функции замкнутой и разомкнутой систем регулирования из условий минимума среднеквадратичной ошибки.
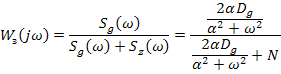
Спектральные плотности

Т.к. корреляционная функция нелинейная по времени, разделим интервал интегрирования на отрицательный (по времени) и положительный:



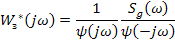
1 этап. В соответствии с методикой Боде-Шеннона на 1-м этапе осуществляют расщепление (факторизацию) знаменателя частотной характеристики на комплексно сопряженные функции.
Факторизация – представление знаменателя частотной характеристики
 в виде произведения комплексно сопряженных функций:
в виде произведения комплексно сопряженных функций:
 ,
,

 ,
,
где  ,
,  ,
,  .
.
2 этап. Разделение, или сепарирование.

Слагаемое в квадратных скобках со знаком «+» представляет собой реализуемую часть, а со знаком «-» - нереализуемую.
Для рассматриваемого примера

произведение в скобках может быть преобразовано к следующему виду:


Сравнивая числители из равенства: 
получаем уравнение для нахождения A и B.

 ,
, 

3. Отбрасывая нереализуемую часть  , получаем квазиоптимальную передаточную функцию:
, получаем квазиоптимальную передаточную функцию:
В примере отбрасываем  и получаем
и получаем

4. Чтобы найти передаточную функцию формирователя управляющего воздействия, необходимо получить передаточную функцию разомкнутой системы.
 - при отрицательной единичной обратной связи
- при отрицательной единичной обратной связи
Делим числитель и знаменатель на (1-k):
где  ,
,  .
.
Имея передаточную функцию разомкнутой системы, можно найти передаточную функцию формирователя.
Для коррелированных сигналов g и f:

Для марковских случайных процессов (таких процессов, у которых информация о возможных последующих изменениях процесса содержится только в предыдущий момент времени) теория оптимальной фильтрации в спектральной области разработана Калманом.
Для обычных случайных процессов накопление информации с ходом времени позволяет прогнозировать изменение процесса в будущем, причем с увеличением интервала наблюдения достоверность прогноза увеличивается, у марковских процессов это свойство отсутствует, примером таких процессов является «белый шум»).








