 2015-03-27
2015-03-27 2054
2054Проблема повышения защищенности от переходных помех возникает в связи с тем, что не всегда представляется возможным удовлетворить простыми средствами различные требования к системам передачи с временным разделением каналов, являющихся зачастую противоречивыми. Так, например, с целью улучшения технико-экономических показателей оконечного оборудования ЦСП ИКМ-ВРК необходимо стремиться к построению многоканальных групповых трактов на большое число каналов
В определенных пределах справедливо утверждение: чем больше число каналов в группе, тем лучше эти показатели. Решение такой задачи требует передачи в течение цикла большого числа сигналов, что, в свою очередь, приводит к уменьшению защитных временных интервалов между канальными импульсами (отсчетами). Если не принять специальных мер, то переходные помехи могут оказаться недопустимо большими.
Известны следующие способы уменьшения переходных помех, возникающих в групповых АИМ трактах ЦСП ИКМ-ВРК:
- расширение полосы пропускания тракта;
- увеличение защитного временного интервала между каналами при
помощи разделения их на подгруппы;
- увеличение защитного интервала путем уменьшения длительности
отсчетов;
- применение пассивных схем, создающих эффект компенсации пере
ходных помех;
- применение активных компенсационных схем.
Достоинства и недостатки первых трех способов, их возможность и область применения вполне очевидны. Рассмотрим два последних способа: применение пассивных и активных компенсационных схем.
С целью получения эффекта взаимной компенсации (автокомпенсации) переходных влияний можно использовать то обстоятельство, что помехи 1 и 2-го рода имеют противоположные знаки. Это показано на рис. 1.9. Очевидно, что в интервале времени t\ - 12 будет происходить некоторая взаимная компенсация переходных помех. Следовательно, варьируя величинами  , можно несколько улучшить защищенность соседних каналов от переходных помех.
, можно несколько улучшить защищенность соседних каналов от переходных помех.
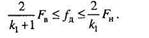
Компенсацию переходных помех можно выполнить применением различных схем синхронных фиксаторов уровня. Идеализированная схема синхронного фиксатора показана на рис. 1.10. Наиболее опасными являются переходные помехи 2-го рода. Поэтому рассмотрим работу схемы применительно к этому виду помех и искажений, полагая, что другие искажения не имеют места или ими можно пренебречь.
При поступлении на вход схемы искаженного импульса влияющего канала (рис. 1.10) ключ А" разомкнут, поэтому импульс проходит на выход схемы. В какой-то момент времени происходит замыкание ключа К, и конденсатор С заряжается до напряжения, равного и обратного по знаку напряжению выброса импульса влияющего канала. В следующий момент времени ключ К размыкается, поэтому поступивший импульс соседнего канала, искаженный воздействием переходов, пройдет через конденсатор на выход схемы, но при этом из напряжения импульса вычитается напря-
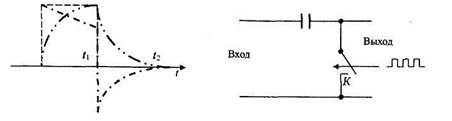
| Рис. 1.9. Принцип взаимной компенсации переходных помех 1 и 2-го рода |
Рис. 1.10. Принцип работы синхронного фиксатора уровня как корректора искажений
жение на конденсаторе. Следовательно, на выходе схемы появится неискаженный импульс соседнего канала.
Оптимальными условиями работы схемы рис. 1.10 являются минимальное внутреннее сопротивление источника отсчетов и максимальное сопротивление нагрузки. При этих условиях время заряда  конденсатора при замыкании ключа К будет минимальным, а время разряда конденсатора при размыкании ключа
конденсатора при замыкании ключа К будет минимальным, а время разряда конденсатора при размыкании ключа  , определяемое величиной сопротивления нагрузки, максимальным. Если в схеме синхронного фиксатора уровня реализованы неравенства
, определяемое величиной сопротивления нагрузки, максимальным. Если в схеме синхронного фиксатора уровня реализованы неравенства  - защитный интервал) и
- защитный интервал) и  -
-
длительность отсчета), то работа реальной схемы приближается к идеальной. С увеличением  работа схемы ухудшается, так как из-за неполного заряда конденсатора за время, равное защитному интервалу, компенсация искажений будет неполной.
работа схемы ухудшается, так как из-за неполного заряда конденсатора за время, равное защитному интервалу, компенсация искажений будет неполной.
1.2.4. Дискретизация групповых сигналов
Мы рассмотрели процессы дискретизации сигналов, у которых отношение  , условно называемых широкополосными. Несколько по-иному определяется значение частоты дискретизации
, условно называемых широкополосными. Несколько по-иному определяется значение частоты дискретизации  для сигналов с отношением
для сигналов с отношением  , которые называются узкополосными. Примерами таких сигналов являются сигналы трехканальной предгруппы с полосой частот 12,3...23,4 кГц, первичной группы с полосой частот 60... 108 кГц, вторичной группы с полосой частот 312...552 кГц и др. систем передачи с частотным разделением каналов.
, которые называются узкополосными. Примерами таких сигналов являются сигналы трехканальной предгруппы с полосой частот 12,3...23,4 кГц, первичной группы с полосой частот 60... 108 кГц, вторичной группы с полосой частот 312...552 кГц и др. систем передачи с частотным разделением каналов.
Будем считать, что импульсные несущие для амплитудно-импульсной модуляции узкополосных сигналов представляют собой периодическую последовательность прямоугольных импульсов (ПППИ) весьма малой длительности. Спектр амплитуд такой ПППИ можно считать равномер-
ным, а интенсивность всех боковых АИМ сигнала - одинаковой. Обозначим произвольную гармонику частоты дискретизации через  Для того, чтобы боковые полосы этой гармоники не совпадали по спектру с исходным сигналом
Для того, чтобы боковые полосы этой гармоники не совпадали по спектру с исходным сигналом  , необходимо выполнить два условия (см.
, необходимо выполнить два условия (см.
рис. 1.3):
1) нижняя боковая НБ-& должна располагаться по оси частот выше или
ниже исходного сигнала;
2) верхняя боковая ВБ-к также должна располагаться по оси частот
выше или ниже полезного спектра FH...FB (включая и отрицательные час
тоты).
Первое условие можно записать в виде двух неравенств, причем безразлично, какое именно из них выполняется

и
(1.16)

Второе условие можно записать в виде двух неравенств, одно из которых обязательно должно выполняться
(1-17)

и
(1.18)

Отметим, что условия (1.16) и (1.18) выполняются всегда. Очевидно, что неравенства (1.18) не могут выполняться на практике ни для одного значения к, если FB > FH, а выполнение неравенств (1.17) является обязательным для любого значения к. Рассмотрим теперь условия (1.15) и (1.16). Условия (1-16) не могут выполняться для всех значений к. Пусть кх - максимальное значение к, для которого соотношения (1.16) еще выполняются. Тогда для всех к = кх + 1, должны выполняться условия (1.15). Сказанное можно записать в виде двух неравенств, которые должны выполняться одновременно:  или в другой форме
или в другой форме
(1.19)
Очевидно, что выполнение этих условий возможно лишь тогда, когда правая часть больше левой или равна ей, т.е.
Решив последнее неравенство относительно к\, получим
 |
(1-20)
В этом уравнении значение к] может быть любым целым числом в пределах от 1 до к\ = ent(FJAF). Здесь ent(x) означает, что от отношения FJAF берется только целое число. Из решения неравенств (1.19) и (1.20) можно найти минимально возможную частоту дискретизации/, мин
 |
(1.21)
Нижняя граничная частота дискретизации равна удвоенной ширине спектра дискретизируемого сигнала и достигается лишь в том случае, когда отношение  является целым числом. В остальных случаях частота дискретизации должна превышать удвоенную ширину спектра исходного сигнала.
является целым числом. В остальных случаях частота дискретизации должна превышать удвоенную ширину спектра исходного сигнала.
Эту методику определения частоты дискретизации полосового сигнала целесообразно применять при  Если
Если  , то частоту дискретиза-
, то частоту дискретиза-
ции следует выбирать согласно теореме Найквиста-Котельникова 
Восстановление сигнала из последовательности его отсчетов можно осуществить с помощью полосового фильтра (ПФ). Частота дискретизации при этом выбирается такой, чтобы обеспечить минимальные значения полос расфильтровки ПФ с симметричными или несимметричными характеристиками затухания.
Для иллюстрации вышесказанного рассмотрим пример определения частоты дискретизации для полосового сигнала.
Пример. Требуется определить минимальное значение частоты дискретизации /д сигнала трехканальной предгруппы, для которой FH = 12,3 кГц и FB = 23,4 кГц.
Решение. Ширина полосы пропускания сигнала равна AF = Fe - FH = = 23,4 - 12,3 = 11,1 кГц. Отношение  = 12,3 / 11,1 = 1, 108. Подста-
= 12,3 / 11,1 = 1, 108. Подста-
вив значения  в (1.21), получим
в (1.21), получим

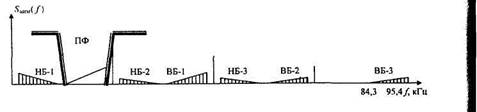
Рис. 1.11. Спектр АИМ полосового сигнала
Это минимальное значение частоты дискретизации не подходит, так как оно находится в полосе частот дискретизируемого сигнала, что недопустимо. При демодуляции такого АИМ сигнала возможны значительные искажения. Воспользуемся формулой (1.19). Положив в ней  получим
получим
(1.22)

Подставив в (1.22) значения граничных частот исходного сигнала, получим:  Выбираем значение частоты дискретизации, равное
Выбираем значение частоты дискретизации, равное 
Спектр АИМ сигнала трехканальной предгруппы для  при-
при-
веден на рис. 1.11.
Как следует из рис. 1.11, спектр АИМ сигнала состоит из: исходного сигнала 12,3...23,4 кГц; нижней (НБ-1) 0,6... 11,7 и верхней боковой (ВБ-1) 36,3...47,4 кГц около первой гармоники частоты дискретизации  ; нижней (НБ-2) 24,6...35,7 и верхней боковой (ВБ-2) 60,3...71,4 кГц около второй гармоники частоты дискретизации 2/л = 48 кГц; нижней (НБ-3) 48,6...59,7 и верхней боковой (ВБ-3) 84,3...95,4 кГц около третьей гармоники частоты дискретизации
; нижней (НБ-2) 24,6...35,7 и верхней боковой (ВБ-2) 60,3...71,4 кГц около второй гармоники частоты дискретизации 2/л = 48 кГц; нижней (НБ-3) 48,6...59,7 и верхней боковой (ВБ-3) 84,3...95,4 кГц около третьей гармоники частоты дискретизации  и т.д. Демодуля-
и т.д. Демодуля-
ция такого АИМ сигнала может быть осуществлена полосовым фильтром ПФ с симметричной характеристикой затухания (величина полосы рас-фильтровки слева  и справа,
и справа,  =
=
= 0,6 кГц равны).
Формула (1.22) с учетом коэффициента к может быть представлена в виде
 (1.23) Для рассмотренного примера, если к =1, то из (1.23) следует
(1.23) Для рассмотренного примера, если к =1, то из (1.23) следует

Всегда значение частоты дискретизации округляется до ближайшего целого кратного 4, т.е. выбираем  = 24 кГц. Если частота дискретизации
= 24 кГц. Если частота дискретизации
определена по формуле (1.23), то демодуляция АИМ сигнала осуществляется ПФ с симметричной характеристикой затухания, полоса расфильт-ровки которого равна
 (1-24)
(1-24)
Всегда стремятся к минимальному значению частоты дискретизации узкополосного сигнала, что имеет место при к=1.
Соотношения (1.22)—(1.24) для определения параметров дискретизации справедливы при  для сигналов, у которых отношение
для сигналов, у которых отношение  т.е. для узкополосных сигналов. Если
т.е. для узкополосных сигналов. Если  , то частота дискретизации
, то частота дискретизации
определяется из соотношения  . Очевидно, что в этом случае для
. Очевидно, что в этом случае для
снижения  необходимо предварительно осуществить перенос исходного спектра в область более низких частот. Так, для третичной группы с полосой частот 812...2044 кГц частота дискретизации может быть доведена, например, до величины
необходимо предварительно осуществить перенос исходного спектра в область более низких частот. Так, для третичной группы с полосой частот 812...2044 кГц частота дискретизации может быть доведена, например, до величины  = 2584 кГц. Для этого полосу частот с помощью несущей
= 2584 кГц. Для этого полосу частот с помощью несущей  = 2104 кГц переносим в полосу частот 60... 1292 кГц и далее осуществляем дискретизацию с частотой дискретизации, равной
= 2104 кГц переносим в полосу частот 60... 1292 кГц и далее осуществляем дискретизацию с частотой дискретизации, равной  Снижения частоты дискретизации с помощью преобразования частоты можно получить и для узкополосных сигналов.
Снижения частоты дискретизации с помощью преобразования частоты можно получить и для узкополосных сигналов.
1.3. Квантование
Амплитуды или уровни отсчетов дискретизированного или АИМ-2 сигнала (в том числе и группового АИМ-2 сигнала) образуют бесчисленное множество его различных реализаций. Первым шагом к уменьшению этого множества является ограничение амплитуды напряжения входных сигналов значением  , вероятность превышения которого не более
, вероятность превышения которого не более  Однако в реальном канале передачи (тракте, линии связи) в результате воздействия помех и различного вида искажений можно передать лишь конечное множество различных уровней (градаций) отсчетов. На приемной стороне всегда возникает неопределенность при обработке близких по уровню сигналов. При этом уровень отсчета даже при высокой разрешающей способности приемных устройств может быть известен с точностью до помехи, т.е. возникает ситуация, характеризующаяся неопределенностью. Следовательно, нет необходимости передавать точные значения отсчетов АИМ-2 сигнала, их можно округлять с определенной точностью. В результате такого округления бесконечное множество амплитуд отсчетов заменяется счетным множеством, содержащим определенный набор разрешенных значений уровней отсчетов-дискретов. Эти разрешенные значения отсчетов называются уровнями квантования.
Однако в реальном канале передачи (тракте, линии связи) в результате воздействия помех и различного вида искажений можно передать лишь конечное множество различных уровней (градаций) отсчетов. На приемной стороне всегда возникает неопределенность при обработке близких по уровню сигналов. При этом уровень отсчета даже при высокой разрешающей способности приемных устройств может быть известен с точностью до помехи, т.е. возникает ситуация, характеризующаяся неопределенностью. Следовательно, нет необходимости передавать точные значения отсчетов АИМ-2 сигнала, их можно округлять с определенной точностью. В результате такого округления бесконечное множество амплитуд отсчетов заменяется счетным множеством, содержащим определенный набор разрешенных значений уровней отсчетов-дискретов. Эти разрешенные значения отсчетов называются уровнями квантования.
Замена непрерывной шкалы уровней отсчетов дискретной шкалой называется квантованием по уровню. Квантование позволяет применять цифровые методы обработки отсчетов, в том числе их кодирование и регенерацию.
Диапазон непрерывных отсчетов лежит в пределах от  для двухполярных сигналов и в пределах от
для двухполярных сигналов и в пределах от  для одиополярных
для одиополярных
сигналов. В процессе квантования весь диапазон изменений отсчетов делится на отрезки (в общем случае неравные), называемые шагами квантования  При попадании отсчета АИМ-2 сигнала в пределы того или иного шага квантования производится его округление до ближайшего разрешенного уровня. Если
При попадании отсчета АИМ-2 сигнала в пределы того или иного шага квантования производится его округление до ближайшего разрешенного уровня. Если  „ значение отсчета в момент времени
„ значение отсчета в момент времени  а
а  значение квантованного отсчета в момент времени
значение квантованного отсчета в момент времени  , то раз-
, то раз-
ность
(1.25)

называется ошибкой квантования или шумом квантования.
Если шаг квантования во всем диапазоне изменений амплитуд отсчетов от  (или от 0 до
(или от 0 до  ) остается величиной постоянной
) остается величиной постоянной  , то такое квантование называется равномерным. Если шаг квантования меняется для различных диапазонов изменений значений отсчетов, то такое квантование называется неравномерным.
, то такое квантование называется равномерным. Если шаг квантования меняется для различных диапазонов изменений значений отсчетов, то такое квантование называется неравномерным.








