 2015-03-20
2015-03-20 536
536Для выполнения лабораторной работы используется пакет прикладных программ (ППП) Control System Toolbox. ППП предназначен для работы с LTI-моделями (Linear Time Invariant Models) систем управления.
В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде комплексной передаточной функции. Синтаксис команды, создающий LTI-систему c одним входом и одним выходом в виде передаточной функции:
TF([bm, …, b1, b0], [an, …, a1, a0])
bm, …, b1 – значения коэффициентов полинома В,
an, …, a1 – значения коэффициентов полинома A.
В пакете MatLab ЛЧХ объекта, заданного с помощью ПФ, можно получить командой
>>bode
Другим вариантом получения графиков динамических характеристик САУ является использование графического интерфейса ППП CST – LTI viewer, вызов которого осуществляется командой
>>ltiview
В которой, в качестве параметра, можно указать имя переменной, содержащей LTI-объект.
Таким образом, выполнение лабораторной работы состоит из следующих шагов:
1. Изучите теоретические сведения.
2. Запустите систему MATLAB.
3. Введите передаточную функцию w как объект tf
4. Используя соответствующую команду
>>bode(w)
Получите ЛАЧХ и ЛФЧХ.
5. Сохраните полученные графики в отчет (Edit-CopyFigure).
6. Запустите модуль LTIViewer (>>ltiview).
7. Загрузите модель w ( File – Import)(рис. 3.1).
File – Import)(рис. 3.1).
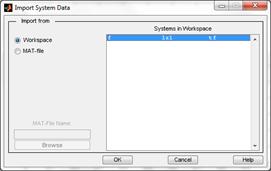 Рис.3.1
Рис.3.1
8.
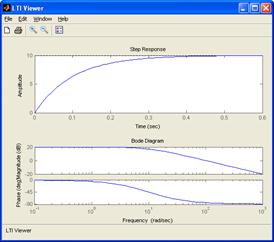
8. Постройте частотные характеристики звена ( ПКМ – Edit-Plot Configuration). Сохраните их в отчет. Результат на рис 3.2.
Рис 3.2
9. Получите семейства графиков характеристик звена при изменении:
· Коэффициента передачи K= 1…10;
· Постоянных времени звена Т= 0,1…1;
· Коэффициента демпфирования ξ= 0,1…1.
Сохраните полученные графики в отчет.
10. Проведите сравнительный анализ полученных характеристик, сделайте выводы о влиянии параметров передаточных функций звеньев на их характеристики.
11. Ответьте на контрольные вопросы.
12. Оформите отчет.








