 2015-04-30
2015-04-30 513
513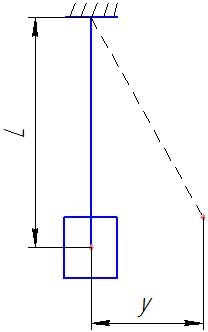
Система закреплена неподвижно на каком-то расстоянии L. Первоначально системе сообщается какой-то импульс (а затем источник сил убирается).
Под действием мгновенно-приложенной силы система отклоняется от положения равновесия на расстояние «y», за счёт сил упругости система стремится занять положение устойчивого равновесия и в какой-то момент времени она его занимает. Т.о. на систему действуют 2-е силы:
 (131)** - сила инерции;
(131)** - сила инерции;
 (132)** - сила упругости.
(132)** - сила упругости.
Обычно эти силы противоположно направлены и инерционная сила берется со знаком «-». Согласно закону Гука эти силы должны быть равны:  или
или  (133)** - линейное дифференцирование уравнение 2 порядка.
(133)** - линейное дифференцирование уравнение 2 порядка.
Для решения необходимо освободиться от коэффициента при 2-й производной:
 (134); K – коэффициент упругости.
(134); K – коэффициент упругости.
В результате решения (134) путём подбора корней Эйлера получим:  при
при 

 ( 135)
( 135)
K – коэффициент упругости зависит от способа закрепления системы.
| Наименование | Схема | Формула |
| Консольная балка | 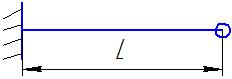
| 
|
| Консольная 2-х опорная балка | 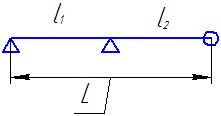
| 
|
| Консольная 2-х пролётная балка | 
| 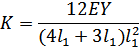
|
| 2-х пролётная,2-х опорная балка | 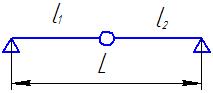
| 
|
При решение (135) при начальных условиях получим максимально-возможное отклонение системы от положения равновесия.
 (136) на практике (136) пользоваться невозможно, т.к. для великого множества механических систем, использованных в производстве невозможно определить начальные отклонения, поэтому из (137) с учётом коэффициента упругости для данного закрепления:
(136) на практике (136) пользоваться невозможно, т.к. для великого множества механических систем, использованных в производстве невозможно определить начальные отклонения, поэтому из (137) с учётом коэффициента упругости для данного закрепления:
 .
.
Величина « » называется статическим прогибом, т.е. прогибом системы при действии частоты собственных колебаний, тогда
» называется статическим прогибом, т.е. прогибом системы при действии частоты собственных колебаний, тогда  ; При
; При  см/с2:
см/с2:  ;
;  ;
;  (138)
(138)
(138) будет характеризовать критическое число оборотов вала для обеспечения минимального статического прогиба.
(138) можно было бы использовать при механических расчётах, если известна величина статического прогибы; в большинстве систем она неизвестна.








