 2015-05-06
2015-05-06 2277
2277Работа цепных конвейеров характеризуется пульсирующим движением цепи при постоянной скорости вращения приводной звёздочки. Причина этого заключается в изменении мгновенного радиуса набегания цепи на приводную звёздочку от R до R·  (рис.9.1).
(рис.9.1).
Динамические усилия в цепи при пуске
Sд.п = mk·D·ε/(2up), (9.1)
где mk – приводная масса конвейера; D – диаметр звёздочки; up – передаточное число редуктора; ε – угловое ускорение привода:
ε = (Mп.ср - Мс)/Jпр. (9.2)
Здесь Mп.ср – средний пусковой момент двигателя; Мс – статический момент, приведенный к двигателю; Jпр – момент инерции всех движущихся масс, приведенный к двигателю.
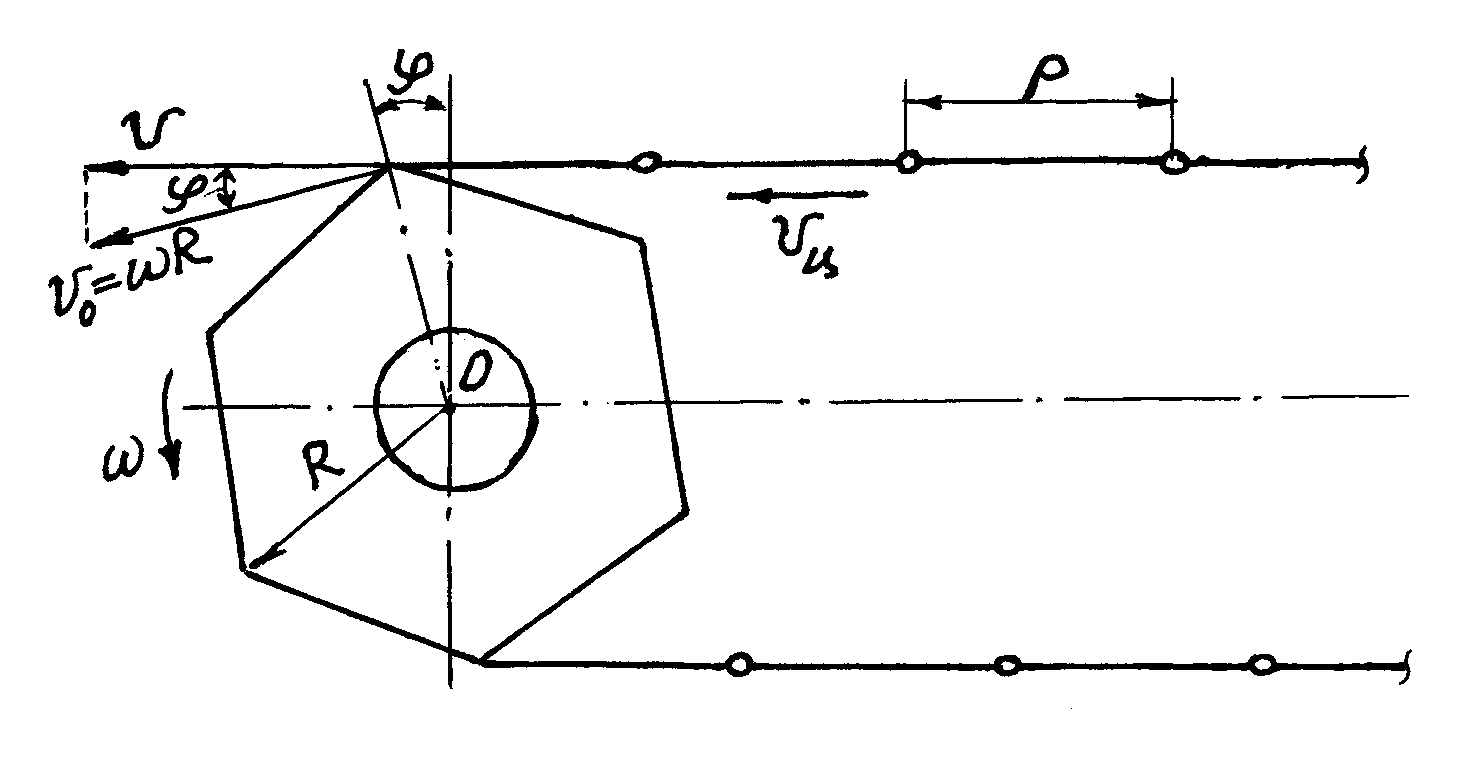
Рисунок 9.1 - Расчётная схема динамики цепного привода
Ускорение цепи при пуске
а = dυ/dt = d(ω R cosφ)/dt = - ω sinφ dφ/dt = -ω2Rsinφ.
Ускорение цепи изменяется по синусоидальной зависимости. При φ = =α/2 его максимальное значение:
amax= ±2π2·υ2/(z 02·ρ)= ± 2π2υ2/(z 02D), (9.3)
где z 0 – число зубьев звёздочки; D – её диаметр.
Наличие этого ускорения вызывает в цепи возникновение динамических деформаций, которые распространяются вдоль неё со скоростью звука υ (м/с) в данной среде, т.е. в упругом стержне, эквивалентном цепи,
υ =  ,
,
где Ец – модуль продольной упругости эквивалентного стержня; ρц – плотность упругого, эквивалентного полотну стержня.
Поскольку сила к цепи прикладывается мгновенно, производя удар, то динамическая нагрузка на цепь составит
Sд.ц= 4mпр·аmax, (9.4)
а расчётная динамическая нагрузка будет:
Sд= 4mпр·аmax- mпр·аmax = 3mпр·аmax, (9.5)
где mпр – приведенная масса для цепного конвейера
mпр = (mг + λmk)·L.
Здесь mг и mk – погонные массы груза и движущихся частей конвейера; L – длина конвейера; λ – коэффициент, учитывающий участие массы обратной ветви в колебательном движении.
Подставив в формулу (9.5) значение аmax, получим выражение для динамического усилия:
Sд = 6(πυ/z0)2·L·mпр/ρ.
Чтобы снизить динамические нагрузки в цепных конвейерах, применяют уравнительные приводы, создающие почти равномерную скорость цепи (рис. 9.2).
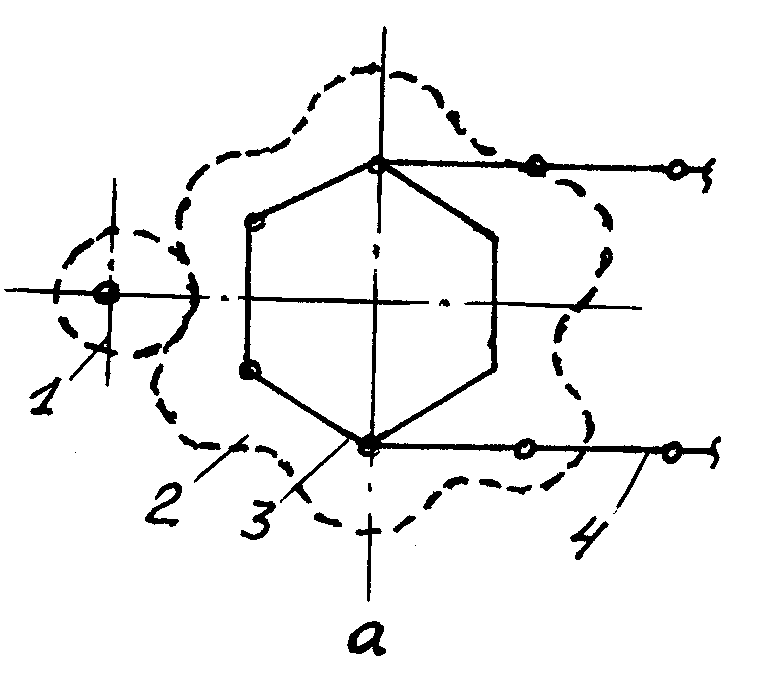
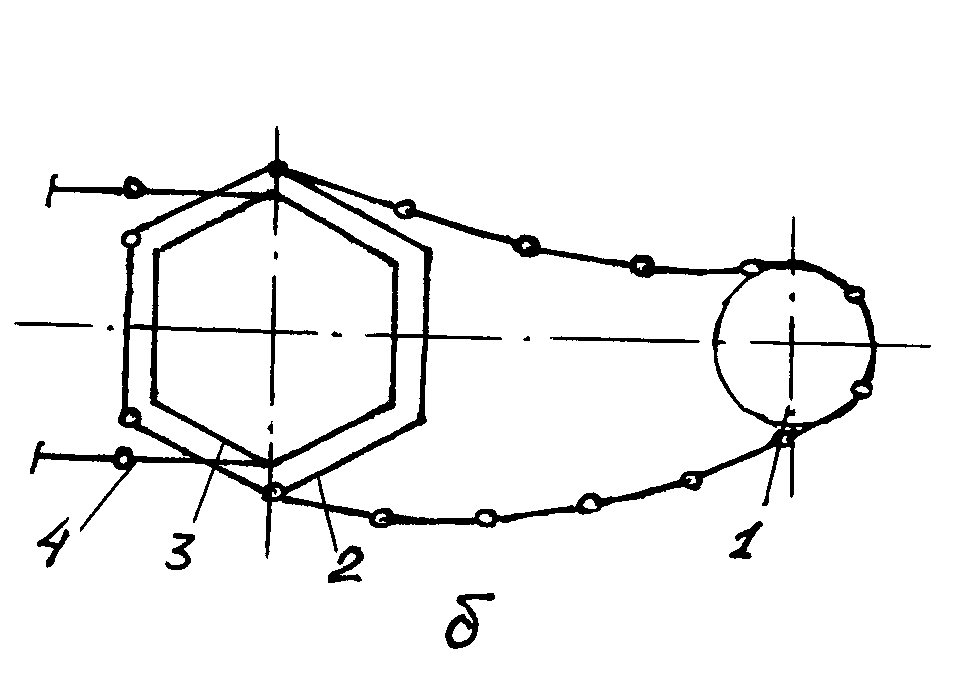
Рисунок 9.2 - Схемы уравнительных приводов
В уравнительном приводе (рис. 10.2, а) с некруглым зубчатым колесом 2 число впадин равно числу зубьев тяговой звездочки 3. Эта звёздочка вращается с переменной скоростью и обеспечивает практически постоянную скорость цепи 4 конвейера.
Уравнительный механизм с короткозвенной цепной передачей 1 (рис 9.2, б) обеспечивает скорость тяговой цепи 4, близкую к равномерной.
Основная литература [5, с. 72…74]
Дополнительная литература [10, с. 342…346]
Контрольные вопросы:
1. Назовите причину пульсирующего движения цепи в цепных конвейерах.
2. Напишите выражение для динамического усилия в цепи конвейера.
3. Какие меры предусматривают в цепных конвейерах для снижения динамических нагрузок?
Лекция 10








