 2015-05-06
2015-05-06 593
593При встрече рабочего органа ЗТМ с тяжёлым твёрдым препятствием в результате перегрузки двигателя скорость машины может довольно быстро снизиться до полной остановки (стопорения).
Динамические нагрузки в элементах трансмиссии привода хода, например, бульдозера могут быть определены с помощью упрощённых двухмассных расчётных схем (12.1,а), где c1 – суммарная жёсткость препятствия cпр и рабочего оборудования cр.о; c2 – суммарная приведённая жёсткость элементов трансмиссии; m1 – масса рабочего оборудования и трактора; m2 – суммарная приведенная масса вращающихся элементов двигателя, маховика, трансмиссии и движителей трактора; R – сопротивление передвижению машины до встречи с препятствием; P д (t) – приведенное движущее усилие двигателя.
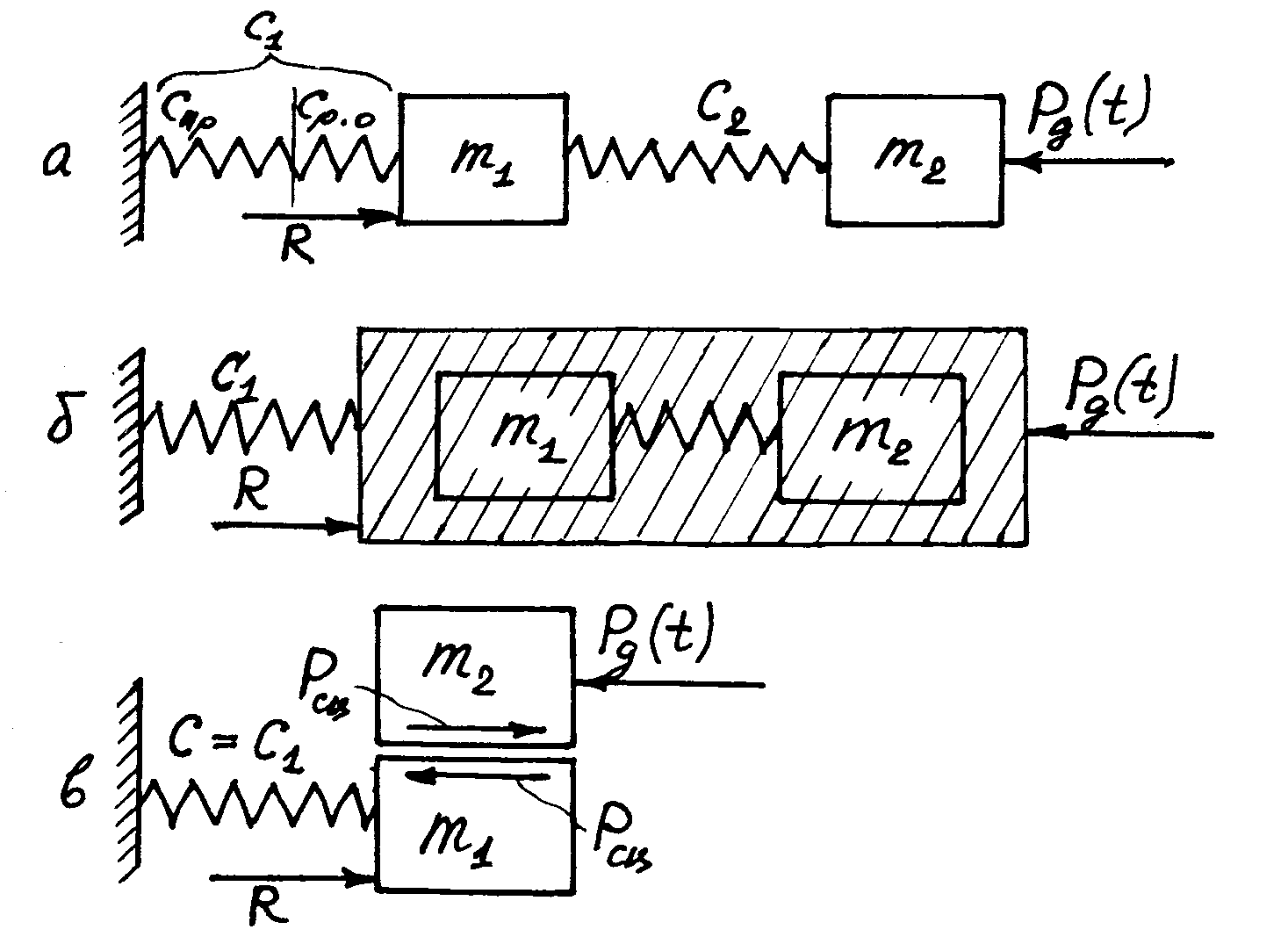
Рисунок 12.1 - Расчётные схемы ЗТМ при стопорении: а – для расчёта нагрузок в элементах трансмиссии; δ – для расчёта нагрузок на рабочее оборудование при неограниченном запасе сцепления движителя с грунтом;
в – для расчёта нагрузок на рабочее оборудование при буксовании движителя.
Данная схема получена приведением всех масс к поступательно движущимся массам, а жёсткостей – к линейной жёсткости.
Расчётные схемы могут быть упрощены до вида, показанного на рис.12,б или рис.12,в. На этих схемах c1 – суммарная приведенная жёсткость рабочего оборудования и препятствия.
В схеме, приведенной на рис.12.1,а под величиной cпр понимается жёсткость массива грунта при резком заглублении рабочего органа. В расчётной схеме (см. рис.12,б) под массой mп понимают сумму поступательно движущихся масс машины и приведённых масс двигателя, маховика и т.д. В третьем случае (см. рис.12,в) масса mп разделена на две части m1 и m2, находящиеся по разные стороны фрикционной связи движителей с грунтом.
Экспериментально установлено, что основная часть процесса взаимодействия рабочего оборудования бульдозера с препятствиями происходит на режиме полного буксования, когда ускорения достигают максимальной величины, скорость падает до нуля и происходит основная часть деформации металлоконструкции и препятствия.
На первом этапе принимают ускорение в начальный момент буксования jmax  0, а скорость vнач.. Тогда максимальное ускорение, возникающее в момент остановки,
0, а скорость vнач.. Тогда максимальное ускорение, возникающее в момент остановки,
jmax - vнач  (12.1)
(12.1)
где cпр – приведённая жёсткость; m – масса бульдозера.
Динамическая нагрузка на рабочий орган бульдозера
Pдин= mjmax= vнач (12.2)
а результирующая нагрузка на рабочий орган
Pр.о= Тφ – Ро + Рдин, (12.3)
где Тφ – сила сцепления; Ро – начальное сопротивление движению машины.
Очевидно, к снижению динамических нагрузок, возникающих под действием случайных нагрузок, приводит уменьшение жёсткости навесного оборудования ЗТМ. Снижение жёсткости металлических конструкций рабочего оборудования может быть осуществлено путём введения специальных упругих элементов: пружин, торсионов и др.
Жёсткость упругого элемента можно определить по зависимости:
cу.э= c·cмк/(cмк- c), (12.4)
где c – общая приведенная жёсткость металлоконструкции с упругим элементом; cмк – жёсткость металлоконструкции.
Основная литература [2, с.121…129]
Дополнительная литература [13, с. 85…88]
Контрольные вопросы:
1. С какой целью составляют упрощённые расчётные схемы ЗТМ при стопорении?
2. Напишите формулу для определения динамической нагрузки на рабочий орган бульдозера при буксовании.
3. От каких параметров зависит жёсткость упругого элемента, вводимого в конструкцию рабочего оборудования ЗТМ?
Лекция 13








