 2015-05-06
2015-05-06 693
69311.1 Особенности рабочего процесса землеройно-транспортных машин (ЗТМ)
На земляных работах всё шире применяют высокоэффективные ЗТМ - бульдозеры, скреперы, автогрейдеры, грейдер-элеваторы. Общей принципиальной особенностью этих средств механизации является реализация движущей силы, необходимой для копания, в результате взаимодействия с грунтом ходовых устройств машин.
Нагрузки, действующие на ЗТМ в условиях эксплуатации, разделяют на нормальные, случайные и аварийные.
Нормальными называют нагрузки (усилия), возникающие в условиях обычной эксплуатации машин. Нормальные усилия являются основой для расчёта элементов машин на усталостную прочность.
Если установлено, что вероятность появления неблагоприятной комбинации усилий достаточно велика, то нагрузка относится к категории случайных и по ней ведётся расчёт машины на статическую прочность.
При аварийных нагрузках конструкция ЗТМ приходит в неработоспособное состояние.
Работа современных ЗТМ протекает в условиях переменных нагрузок, в значительном диапазоне скоростей, при переменных скоростях и часто при неустановившихся режимах движения. Колебания скорости, вызванные возрастанием сопротивлений, приводят к возникновению динамических нагрузок на рабочее оборудование и силовые элементы конструкции, приводящие это оборудование ЗТМ в движение.
Рассмотренные особенности рабочих процессов ЗТМ дают основание характеризовать режим их работы как тяжёлый, переменный режим.
11.2 Обоснование расчётной схемы ЗТМ
При составлении расчётных схем для определения динамических нагрузок на элементы ЗТМ необходимо знать жёсткости препятствий и рабочего оборудования. К непреодолимым препятствиям относятся: массив мёрзлого грунта или камни, балки, сваи и т.п.
Жёсткости препятствий, встречающихся при работе ЗТМ, определяются экспериментально с учётом деформации самого препятствия и грунта, в котором оно находится. Жёсткость металлоконструкций навесного рабочего оборудования определяется также экспериментально. Для бульдозера её ориентировочно можно определить по зависимости:
cмк = α·Q,
где Q – масса трактора; α – коэффициент, равный 0,9…1,0.
Жёсткость препятствия cпр и металлоконструкции cмк можно рассматривать как две последовательно соединённые жёсткости, а приведенную жёсткость cп найти из равенства
1/cп = 1/cмк+1/cпр
Приведение масс ЗТМ выполняется по общим правилам механики. В качестве центра приведения выбирается вал двигателя, вал ведущей звёздочки или колеса, а также поступательно движущаяся масса агрегата (рис.11.1).
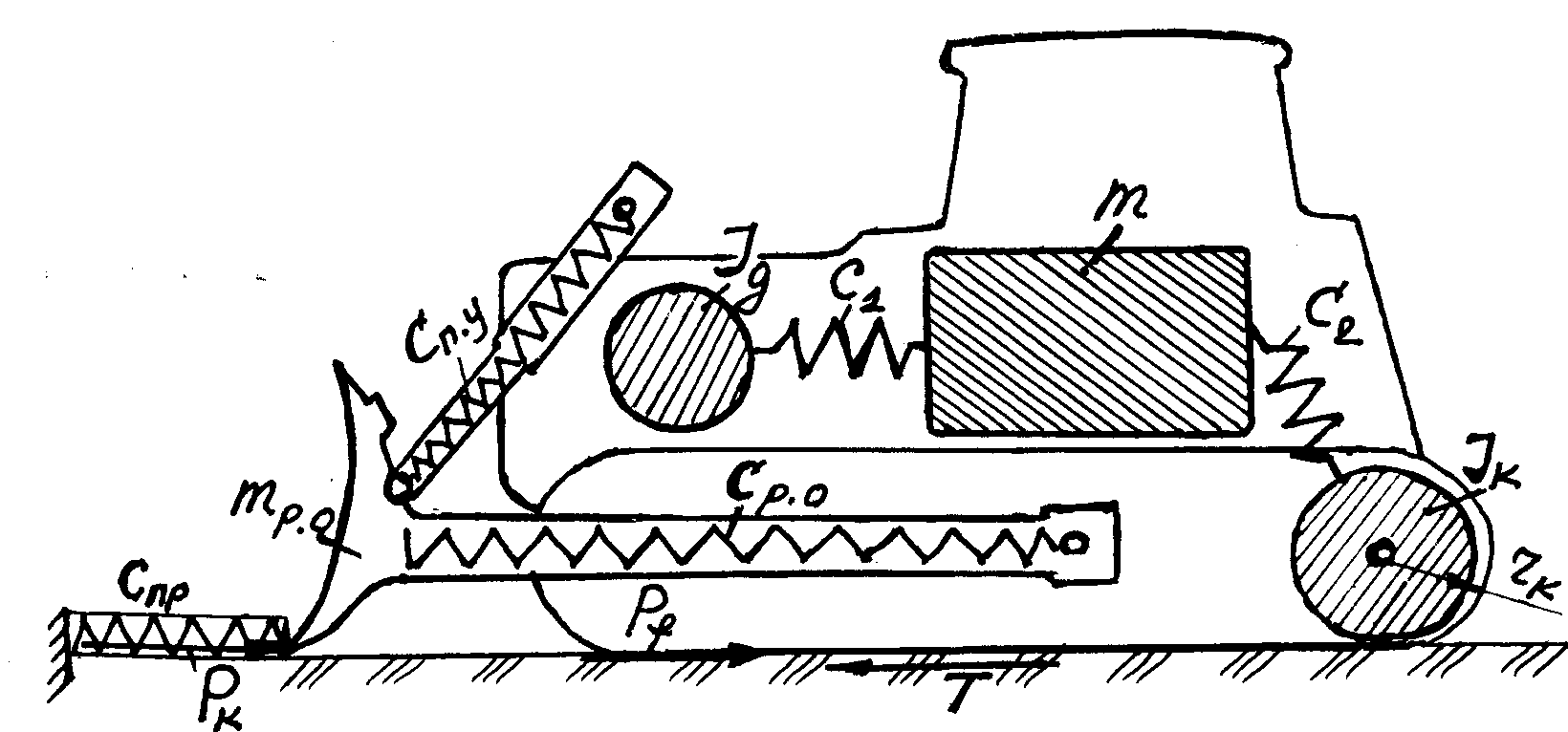
Рисунок 11.1 - Эквивалентная динамическая схема бульдозера
При приведении масс к вращающемуся валу выражение для определения суммарного приведенного момента инерции агрегата будет:
Jв =  + m
+ m  . (11.2)
. (11.2)
При приведении масс к поступательно движущейся массе выражение для определения суммарной приведенной массы агрегата имеет вид:
mпр=  + m. (11.3)
+ m. (11.3)
В формулах (11.2) и (11.3) обозначено:
n – количество деталей, вращающихся при движении агрегата; Jz – момент инерции детали относительно собственной оси вращения; m – масса поступательно движущегося агрегата; rк – радиус ведущей звёздочки или колеса; i – передаточное отношение от центра приведения до приводимого участка.
Основная литература [2, с.117…120]
Дополнительная литература [13, с. 82…84]
Контрольные вопросы:
1. Приведите характеристику нагрузок, действующих на ЗТМ в условиях эксплуатации.
2. Из какого равенства можно найти приведенную жёсткость, учитывающую жёсткость препятствия и металлоконструкции бульдозера?
3. Напишите выражение суммарной приведенной массы агрегата, полученное при приведении его масс к поступательно движущейся массе.








