 2015-05-06
2015-05-06 2487
2487Выясним, какие силы и моменты действуют на трактор (автомобиль), выделим из них силы движения и сопротивления: сила тяжести G (вес) машины, приложенная в центре тяжести и направленная вертикально вниз; ведущий крутящий момент Мвед, подводимый от двигателя, установленного на машине, к оси ведущих колёс; момент сопротивления качению ведомых колёс Мfвм; момент сопротивления качению ведущих колёс Мfвщ; сила сопротивления перекатыванию Pf машины, параллельная направлению движения; касательная сила тяги Ркφ ведущих колёс машины; нагрузка Ркр на крюке, которая изменяется в зависимости от скорости движения и других факторов.
Уравнение движения трактора (автомобиля) напишем в форме Лагранжа:
где t – время; К – кинетическая энергия машины, движущейся со скоростью v; q – обобщённая координата; Qоб - обобщённая сила; Qоб = δА/δх.
Здесь δА – сумма работ всех заданных сил и моментов; δх – возможное перемещение.
Кинетическая энергия машины
К = mv2/2+Jпр ·ωk2/2,
где m – масса поступательно движущихся частей машины; Jпр – приведенный к оси ведущих колёс момент инерции вращающихся масс двигателя и трансмиссии; ωk – угловая скорость вращения ведущих колёс.
Значение Jпр можно определить по формуле
Jпр=J д ·iтр2 ·ηтр+Σ Jх · iх2 · ηх+Jk (13.1)
где Jg, Σ Jх и Jk - моменты инерции вращающихся масс соответственно трансмиссии и от рассматриваемых шестерён до оси ведущих колёс; ηтр и ηх - КПД данных передач.
Здесь iтр = ω д / ωk, ix = ωx/ ωk; ω д и ωх – угловые скорости вращения соответственно коленчатого вала двигателя и шестерён трансмиссии.
На рис.13.1 условно показаны вращающиеся массы двигателя и трансмиссии машины, обозначены их моменты инерции и угловые скорости вращения.
Так как q = x, т.е. это перемещение машины по оси х, а ωk= v/rk, то  .
.
Здесь rк – радиус ведущего колеса.
K= mv2/2 + Jпр · v2/(2rk2) = (mv2/2)[1+ Jпр/m rk2)] = δвр · mv2/2,
ðk/ðx=0,
где δвр – коэффициент учёта вращающихся масс:
δвр=1+ Jпр/(m rk2)  1,05…1,25.
1,05…1,25.
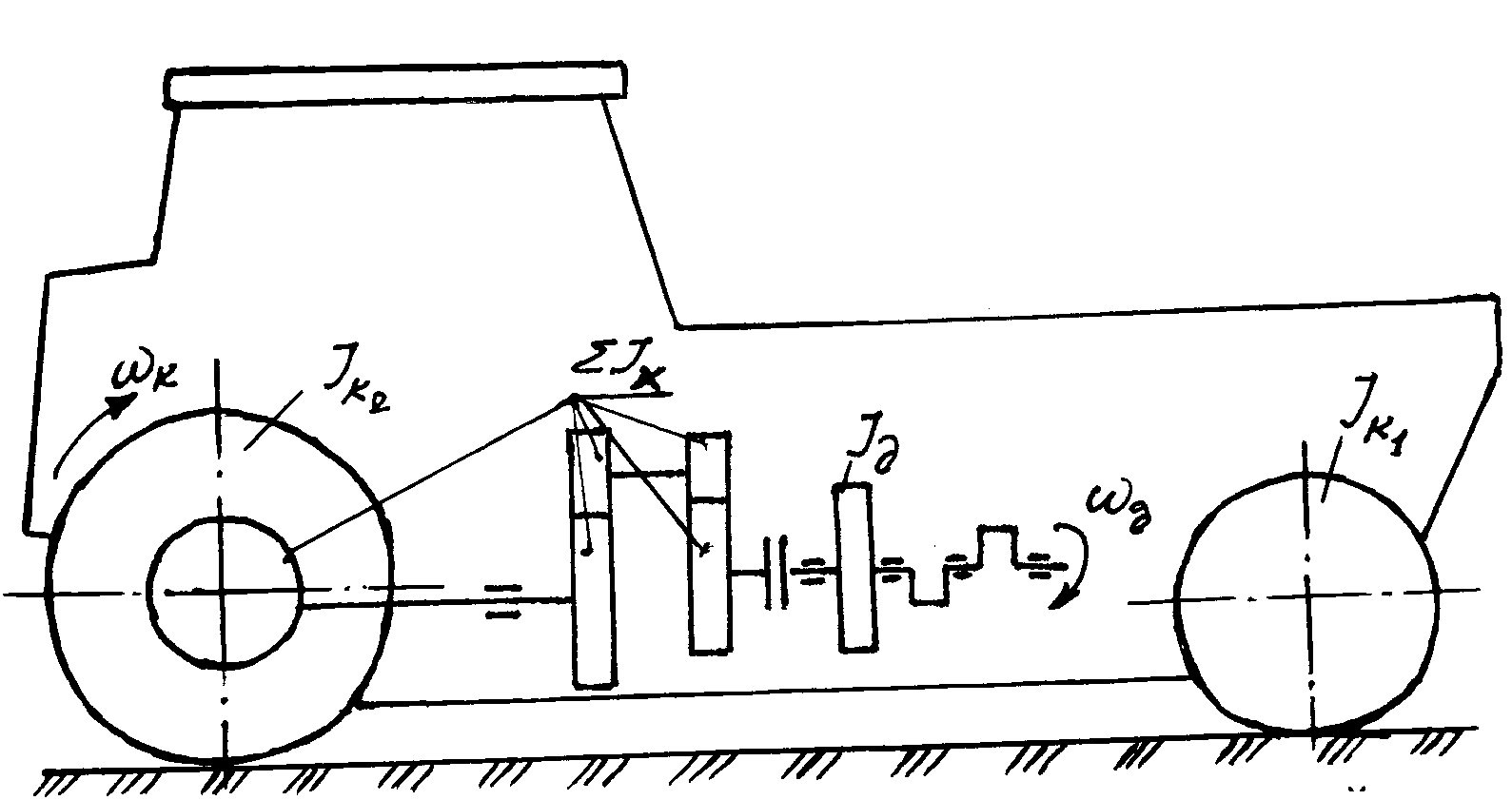
Рисунок 13.1 - Динамическая схема вращающихся частей трактора (автомобиля)
Подставив эти выражения в уравнение (13.1), получим
 [
[  (δвр·mv2/2)] = Qоб или δвр·mdv/dt = Qоб. (13.2)
(δвр·mv2/2)] = Qоб или δвр·mdv/dt = Qоб. (13.2)
Дифференциальное уравнение движения трактора (автомобиля) в общем виде получим после соответствующих подстановок в уравнения (13.2)
δвр·m  = Pkφ –
= Pkφ –  Pсопр или
Pсопр или  (13.3)
(13.3)
где  =Pf + Pкр ·cosγкр+ Pω+ G ·sinα – сумма сил сопротивления движению машин.
=Pf + Pкр ·cosγкр+ Pω+ G ·sinα – сумма сил сопротивления движению машин.
Здесь Pf, Pкр, Pω, G – силы соответственно перекатыванию, сопротивления воздуха, на крюке, тяжести машины; α – угол подъема дороги; γкр – угол наклона силы на крюке Pкр к горизонтали.
Из уравнения движения (13.3) получим выражение для тягового баланса машины – соотношения движущих сил и сил сопротивления движению
Pkφ = Σ Pсопр ± δвр ·Pj, (13.4)
где Pj = mj – сила инерции поступательно движущихся масс; j = dv/dt – ускорение поступательно движущихся масс машины.
Основная литература [6, с. 309…311]
Дополнительная литература [13, с.17…20]
Контрольные вопросы:
1. От каких параметров зависит приведенный к оси ведущих колёс момент инерции вращающихся масс двигателя и трансмиссии трактора (автомобиля)?
2. Напишите выражение дифференциального уравнения движения трактора (автомобиля) в общем виде.
3. Напишите выражение для тягового баланса машины.

