 2015-05-06
2015-05-06 6284
6284б) Относительно оси:
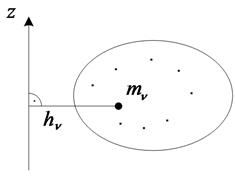
Рис. 8
 (35)
(35)
в) Относительно плоскости:
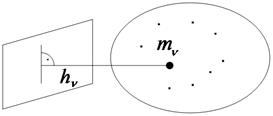
Рис. 9
 (36)
(36)
2.3.3 Моменты инерции абсолютно твердого тела.
Для сплошных тел роль материальной точки имеет элементарный объем  массы
массы  .
.
а) Относительно полюса:
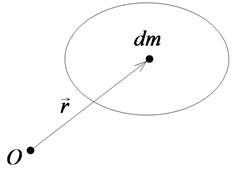
Рис. 10
Моментом инерции твердого тела относительно полюса называется интеграл вида:
 (37)
(37)
б) Относительно оси:
Рис. 11
 (38)
(38)
в) Относительно плоскости:
Рис. 12
 (39)
(39)
Здесь dm=ρdV, где ρ – плотность тела, V - объем тела. Моменты инерции одинаковых по форме тел, изготовленных из различных материалов, отличаются друг от друга.
2.3.4 Моменты инерции однородных тел.
Однородным называется тело, если плотность тела во всех его точках одинакова.
а) Момент инерции однородного стержня
Имеем однородный стержень длиной «l» и массой «m». Центр масс стержня точка «с».
Вычислим момент инерции стержня относительно оси СZ, проходящей через центр масс стержня и перпендикулярной к нему (рис.13)
Рис. 13
Согласно формуле (38), момент инерции тела относительно оси вычисляется по формуле: .
Если разделить стержень на отрезки длиной dx, то соответствующий элемент массы будет пропорционален dx,, а если бы dx составляло длину всего стержня, то его масса была бы равна m. Поэтому
 (40)
(40)
тогда
 (41)
(41)
Таким образом, момент инерции однородного стержня относительно центра масс вычисляется по формуле:
 (42)
(42)
б) Момент инерции цилиндра, масса которого распределена по ободу ( т.е. полый цилиндр) или кольца
Имеем цилиндр, масса которого распределена по ободу, его радиус «R» и масса «m». Центр масс расположен на оси вращения.
Вычислим момент инерции стержня относительно оси СZ, проходящей через центр масс стержня (рис.14)
Рис. 14
 (43)
(43)
в) Сплошной однородный цилиндр
Пусть радиус цилиндра равен R, его масса m, высота H. Построим цилиндрическую трубку радиуса r толщина dr (r<R)высотой H толщиной dr и длина 2  r (Рис.15). За элемент массы dm возьмем массу этой трубки. Объем равен dV=2 rHdr, а ее масса dm=ρdV =ρ 2 rHdr, где ρ = m/V – плотность. Объем всего цилиндра V= R2H. Следовательно,
r (Рис.15). За элемент массы dm возьмем массу этой трубки. Объем равен dV=2 rHdr, а ее масса dm=ρdV =ρ 2 rHdr, где ρ = m/V – плотность. Объем всего цилиндра V= R2H. Следовательно,
 (44)
(44)
Рис. 15
По определению:
 (45)
(45)
Получили для сплошного однородного цилиндра (диска или шкива):
 (46)
(46)
2.3.5 Радиус инерции.
Характеристикой, не зависящей от массы тела, является радиус инерции. Радиус инерции измеряется в метрах и имеет простой физический смысл. Если данное тело превратить в материальную точку той же массы, то для того чтобы момент инерции оставался таким же как у исходного тела, эту точку следует поместить на расстояние от оси, равное радиусу инерции.
Зная радиус инерции тела можно определить момент инерции тела по формуле для материальной точки.
 (47)
(47)
где  - радиус инерции.
- радиус инерции.
Пример:
Определить радиус инерции для полого цилиндра:
 (48)
(48)
 (49)
(49)
 ;
;
 (50)
(50)
Радиус инерции используется обычно в задачах для неоднородных тел. Определяются радиусы инерции неоднородных тел экспериментальным путем.
2.3.6 Физический смысл моментов инерции.
Ввёл понятие момента инерции Гюйгенс при изучении математического маятника. Термин «момент инерции» ввел Леонард Эйлер. Физический смысл момента инерции аналогичен физическому смыслу массы, т.к. выражаются через массу. Масса – это мера инертности тела по отношению к поступательному движению. Масса характеризует способность тела препятствовать изменению скорости, т.е. способность тела сохранять свою скорость неизменной.
Аналогично момент инерции характеризует меру инертности тела по отношению к вращательному движению. Момент инерции характеризует способность тела сохранять угловую скорость неизменной, т.е. препятствует появлению углового ускорения тела. Таким образом, инерция вращающейся системы зависит не только от масс ее точек, но и от того, как они расположены по отношению к оси вращения.
2.3.7 Теорема Гюйгенса – Штейнера (теорема о моментах инерции относительно параллельных осей).
В справочниках приводят моменты инерции тел относительно осей координат, проходящих через центр масс. Если же ось вращения смещена из центра масс, то вопрос о величине момента инерции позволяет решить специальная теорема – теорема Гюйгенса-Штейнера или теорема о моментах инерции относительно параллельных осей.
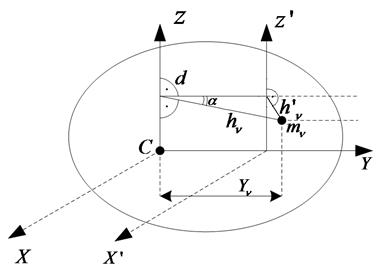
d – перпендикулярно осям.
h – перпендикулярны осям.
Рис. 16
Формулировка: Момент инерции механической системы (тела) относительно произвольной оси  равен моменту инерции этого тела относительно параллельной оси, проходящей через центр масс, и величины, равной произведению массы этой системы (тела) на квадрат расстояния (d) между осями.
равен моменту инерции этого тела относительно параллельной оси, проходящей через центр масс, и величины, равной произведению массы этой системы (тела) на квадрат расстояния (d) между осями.
Таким образом, теорема Гюйгенса – Штейнера имеет вид:
 (51)
(51)
Доказательство:
По определению момента инерции:
 (52)
(52)
 находим по теореме косинусов:
находим по теореме косинусов:
 (53)
(53)
Где «+» – для тупого угла;
«-» – для острого угла.
По определению центра масс:
 (54)
(54)
Следовательно,  ,
,
но,  так как точка С это начало координат, то
так как точка С это начало координат, то  , а это значит, что:
, а это значит, что:
 (55)
(55)
Пример:
Определить момент инерции стержня относительно оси z,, проходящей через конец стержня.
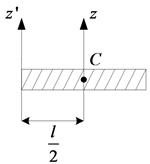
Рис. 17
По теореме Гюйгенса – Штейнера:
 (56)
(56)
Значит,  - момент инерции стержня относительно конца.
- момент инерции стержня относительно конца.
Таким образом, момент инерции относительно оси, проходящей через конец стержня в четыре раза больше, чем момент инерции стержня относительно оси, проходящей через центр масс.
Момент инерции в любой задаче надо вычислять относительно оси вращения и, если ось вращения не проходит через центр масс надо использовать теорему Гюйгенса – Штейнера. Из всех моментов инерции механической системы относительно параллельных осей самый маленький момент инерции у системы будет относительно оси, проходящей через центр масс.
2.3.8 Осевые моменты инерции в декартовых координатах.
Рис. 18
(57)
Где  - по теореме Пифагора.
- по теореме Пифагора.
Определение: осевыми моментами инерции тела в декартовых координатах называются интегралы вида:
 (58)
(58)
2.3.9 Полярный момент инерции тела в декартовых координатах.
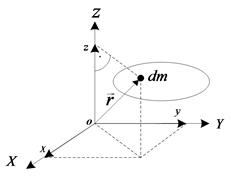
Рис. 19
Определение: полярным моментом инерции тела в декартовых координатах называется интеграл вида:
 (59)
(59)
Где  .
.
Таким образом, полярный момент инерции в декартовых координатах имеет вид:
 (60)
(60)
Сложив почленно осевые моменты инерции, получим:

 (61)
(61)
Учитывая, что полярный момент инерции определяется по формуле:
 (62)
(62)
Получим формулу взаимосвязи между моментами инерции:
 (63)
(63)
2.3.10 Центробежные моменты инерции.
Осевые моменты инерции не полностью характеризуют поведение тела при его вращении. В механике в качестве характеристик, учитывающих несимметричность в распределении масс, вводят центробежные моменты инерции.
Определение: Центробежными моментами инерции тела называются моменты инерции, вычисляемые по формулам:
 (64)
(64)
Центробежные моменты инерции могут иметь не только положительные и нулевые значения, но и отрицательные. В этом их отличие от осевых моментов инерции.
2.3.11 Главные оси инерции.
Определение: Главными осями инерции называются такие оси, для которых все центробежные моменты инерции равны нулю.
Симметрия в расположении масс относительно оси (например, Х) характеризуется обращением в нуль двух центробежных моментов инерции.
Если  , значит ось «Х» есть главная ось инерции.
, значит ось «Х» есть главная ось инерции.
Если  , то все оси «X, Y, Z» являются главными осями инерции.
, то все оси «X, Y, Z» являются главными осями инерции.
2.3.12 Главные центральные оси инерции.
Определение: Главными центральными осями инерции называются такие главные оси инерции, которые проходят через центр масс.
Если в теле есть ось симметрии, то эта ось всегда является одной из главных центральных осей инерции, так как центр масс лежит на этой оси, но не все главные оси инерции являются осями симметрии.
Если тело имеет плоскость симметрии, то любая прямая перпендикулярная этой плоскости и проходящая через центр масс является одной из главных осей симметрии для точки пересечения этой оси с плоскостью.
Через любую точку тела можно провести, по крайней мере, три взаимно перпендикулярных главных осей инерции.
Понятие о главных осях инерции играет важную роль в динамике твердого тела. Если главные оси инерции выбрать в качестве декартовых осей координат, то все центробежные моменты инерции обращаются в нули и соответствующие уравнения или формулы оказываются значительно проще, чем в других системах координат.
2.3.13 Моменты инерции относительно оси любого направления.
Рис. 20
Пусть:  - направляющие косинусы оси L.
- направляющие косинусы оси L.
Определение: Моментом инерции тела относительно произвольной оси «L» называется момент инерции, вычисляемый по формуле:

 (65)
(65)
Если оси «X, Y, Z» являются главными осями инерции, то  и формула (56) будет иметь вид:
и формула (56) будет иметь вид:
 (66)
(66)
2.3.14 Тензор инерции.
Определение: Тензором инерции называется такой тензор, элементами которого являются моменты инерции (осевые и центробежные).
 (67)
(67)
Это симметричный тензор, т.к. тензор называется симметричным, если он не изменяется при перестановке индексов  .
.
Тензор называется антисимметричным, если при перестановке индексов он меняет знак  .
.
Тензор инерции симметричный тензор, т.к.  .
.
Тензор инерции позволяет компактно записывать моменты инерции и легко производить математические операции с ними.
2.3.15 Эллипсоид инерции.
Рис. 21
Знаем, что:
(68)
Выберем на оси «L» точку «M» такую чтобы  , тогда направляющие косинусы оси «L» имеют вид:
, тогда направляющие косинусы оси «L» имеют вид:
 (69)
(69)
Подставим (60) в формулу (59):
 (70)
(70)
Разделив на  , получим эллипсоид инерции в произвольной системе координат:
, получим эллипсоид инерции в произвольной системе координат:
 (71)
(71)
Если оси «X, Y, Z» являются главными осями инерции, то  и эллипсоид имеет вид:
и эллипсоид имеет вид:
 (72)
(72)
Канонический (простейший) вид эллипсоида инерции.
 (73)
(73)
где полуоси эллипсоида инерции:
 (74)
(74)
Смысл эллипсоида инерции в том, что он характеризует распределение масс в теле.
Рис. 22
3. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ МАТЕРИАЛЬНОЙ ТОЧКИ И

