 2015-04-23
2015-04-23 1197
1197Судно, перемещаясь по водной поверхности Земли, совершает движение в двух средах — водной и воздушной, которые также движутся относительно дна морей и океанов.
Движение судна принято делить на относительное (относительно водных масс) и абсолютное (относительно поверхности Земли).
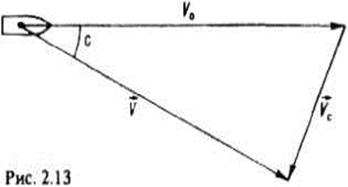
Перемещение судна под действием водных и воздушных масс, т. е. под действием ветра и течения, называют переносным движением. В векторном представлении все три вида движения представлены на рис. 2.13 в виде треугольника скоростей.
В специальной литературе вектор переносной скорости Vс обычно связывают с понятием общего сноса судна под действиемветраи течения. Таким образом, векторные формулы связи скоростей могут быть записаны так:
 | |||||
 |  |
V= V0 + Vc (2.32)



 Vс= VВ + VT (2.33)
Vс= VВ + VT (2.33)
 где V — вектор абсолютной скорости; V0 — вектор относительной
где V — вектор абсолютной скорости; V0 — вектор относительной
скорости; Vc — вектор переносной скорости; VB — вектор скорости
 сноса судна ветром; VТ — вектор скорости течения.
сноса судна ветром; VТ — вектор скорости течения.
В соответствии с типом измеряемой скорости современные лаги делят на абсолютные и относительные. В настоящее время реализованы два физических принципа измерения абсолютной скорости движения судна: по доплеровскому сдвигу частот и с помощью инерциальных систем навигации. Относительную скорость изменяют в основном двумя типами лагов: гидродинамическими и индукционными. Гидродинамические лаги работают по принципу измерения динамического давления набегающего потока воды при движении судна. Относительная скорость являетсяфункцией измеренного давления РД:
V0 = f(Рд)
Индукционные (электромагнитные) лаги работают по принципу электромагнитной индукции. Магнитное поле, создаваемое специальным устройством на днище судна, перемещается в потоке морской воды, являющейся электролитическим раствором. В ней наводится ЭДС — функция относительной скорости судна:
V0 = f(ЭДС)
К измерителям переносной скорости относят дрейфомеры и измерители течений. Таким образом, истинной илиабсолютной скоростью судна называют скоростьсуднаVотносительно Земли (дна) с учетом действия ветра и течения.
Относительной скоростьюV0 называют скорость судна относительно водных масс.
Преподаватель Нерубасский А.А.
ПЛАН
проведения практического занятия ПЗ 3.1
Тема: Определение ∆МК, ∆ГК. Расчёт ∆Л, Кл на мерной линии и с использованием РЛС.
Оснащение: Класс навигационной прокладки (репитера МК, ГК, лага), МНК, Таблицы девиации, поправок лага, Мореходные таблицы МТ-75(МТ-2000), ПЭВМ.
Цель занятия:
Знать: Терминологию и условные обозначения. Правила расчёта склонения, пользование таблицей девиации, требования Главы V СОЛАС-74 и РШСУ-98 по определению ∆МК, ∆ГК, ∆Л, Кл и методы их определения.
Уметь: Приводить МНК к году плавания, определять девиацию по таблице, по заданным исходным данным рассчитывать ∆МК, ∆ГК, ∆Л, Кл.
План проведения занятия:
-опрос знания курсантами терминологии, условных обозначений согласно РШСУ-98, правил и методов определения ∆МК, ∆ГК;
-опрос знания курсантами требований к оборудованию мерной линии и методов определения ∆Л и Кл на мерной линии и с использованием РЛС;
-инструктаж о порядке выполнения расчётов;
-выдача индивидуальных заданий для выполнения расчётов в аудитории и для домашних заданий.
Литература:
1. Ю.К. Баранов «Навигация». Учебник для вузов. СПб. Изд. «Лань»1997- 349с.(Гл.2.4-2.8 с.39).
2. М.И. Гаврюк «Задачник по навигации и лоции». М.;Транспорт, 1984-312с. (Гл.2.5 с.34; 2.7 с.38)
3. РШСУ-98.Приложение 2.с.73, Приложение 5. с.84.
Методы определения остаточной девиации, поправок магнитных и гиро- компасов, контроль за их работой.
Основными достоинствами магнитного компаса являются простота его устройства, высокая степень автономности и надежности. Главным недостатком — невысокая точность определения направлений. Погрешности могут достигать 2...4°, особенно при качке. Источники погрешностей:магнитное склонение, девиация, инерционность инедостаточная чувствительность системы магнитных стрелок к магнитному полю Земли. Необходимо иметь в виду, что картушка магнитного компаса после маневрирования судна приходит в меридиан через 3...4 мин, поэтому его использование в этот интервал времени недопустимо.
На судне обычно устанавливают два магнитных компаса: главный компас для определения места судна и путевой — для управления судном. Главный компас устанавливают в ДП судна, в месте, обеспечивающем круговой обзор и максимальную защищенность от судовых магнитных полей. Обычно — это верхний мостик судна.
Важным для судовождения является точное знание девиации магнитного компаса. Большая девиация недопустима на судне, так как в этой ситуации компас перестает реагировать на магнитное поле Земли и становится просто бесполезным.
Девиация магнитного компаса уничтожается при нормальных условиях плавания не реже одного раза в 6 мес. специальными способами, изучаемыми в курсе девиации. Остаточная же девиация подлежит определению навигационными способами и не должна превышать нескольких градусов.
Девиация магнитного компаса определяется:
- не реже одного раза в год;
- после ремонта, докования, размагничивания судна, а также после погрузки и выгрузки грузов, меняющих судовое магнитное поле;
- при значительном изменении магнитной широты;
- при расхождении фактической девиации с табличной более чем на 1° для главных компасов и на 2° для путевых;
- перед дальним рейсом.
Все способы определения остаточной девиации построены на использовании формулы:
МП = КП + δ
Так как девиация зависит от курса судна, то обычно ее определяют на 8 равноотстоящих компасных курсах, а промежуточные значения находят линейнойинтерполяцией.
Предполагают также, что судовое магнитное поле симметрично относительно ДП судна, т.е. девиация симметрично распределена относительно магнитного меридиана, поэтому среднее значение компасных пеленгов, взятых на какой-либо удаленный ориентир на равноотстоящих курсах, можно принять за оценку магнитного пеленга Формулу для определения магнитного пеленга можно записать так:
∑ КПi
i = 1
 МП = + А
МП = + А
Где А — некоторая поправка за систематическую погрешность, которая должна быть известна на каждом судне для конкретного компаса.
Все измерения должны проводиться, как минимум, двумя наблюдателями.
Рассмотрим основные методы определения девиации.
1. По створу (рис. 2.10).
Это наиболее точный метод. Судно пересекает створ на 8 равноотстоящих компасных курсах, и штурман определяет КПi створа. Компасные курсы отстоят друг от друга на 45°.
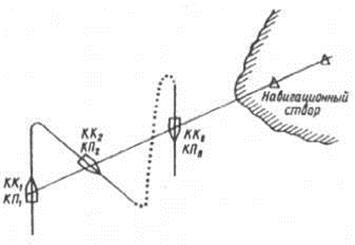

Магнитный пеленг рассчитывают по формуле:
МП = ИП – d (2.20)
ИП снимают с карты, d должно быть приведено к году плавания, а при маневрировании в окрестности створа необходимо учитывать инерционные характеристики магнитного компаса.
Если магнитное склонение неизвестно, то можно использовать формулу:
∑ КПi
i = 1
 МП = + А
МП = + А
и составляют таблицу или график девиации как функцию компасного курса.
Для удобства применения таблицу составляют через 10° по компасному курсу.
При пользовании таблицей девиации в задаче «перевод румбов» штурман не имеет компасного курса, а поэтому в таблицу входят с рассчитанным магнитным курсом и получают приближенное значение КК'. Если необходимо, то делают второеприближение, используя КК' для входа в таблицу.

