 2015-04-23
2015-04-23 1624
1624Выработка расстояния относительными лагами производится по измеренной скорости с помощью интеграторов:
ti+ 1
S0 = ∫ V0dt
t1
Расстояние S0 от некоторого нуля фиксируется специальным счетчиком, а его мгновенное значение в данный момент называется отсчетом лага (ОЛ). Пройденное судном расстояние определяют с помощью относительного лага как разность между его последовательными отсчетами (разность отсчетов лага, РОЛ) в моменты времени ti+1 и ti снятыми со счетчика лага:
РОЛ = ОЛi+1 – ОЛi.
Лаг, как и любой прибор, определяет скорость с погрешностью. Систематическая погрешность в показаниях лага может быть скомпенсирована поправкой ΔЛ, имеющей обратный знак. Такая поправка, выраженная в процентах, называется поправкой лага.
Она рассчитана по следующим формулам и может иметь как положительный, так и отрицательный знаки (рис. 2.14):

S0 – РОЛ
 ΔЛ = 100% (2.34)
ΔЛ = 100% (2.34)
РОЛ
V0 –Vл
 ΔЛ = 100% (2.35)
ΔЛ = 100% (2.35)
Vл
где РОЛ — разность отсчетов лага, определяемая по его показаниям в последовательные моменты времени t1 и t2
РОЛ = ОЛ2 — ОЛ1; S0 — фактически пройденное судном расстояние относительно воды, которое может быть определено различными точными навигационными способами; соответственно V0 и Vл — скорости судна относительно воды ипоказанная лагом.
Необходимо четко представлять, что при отсутствии течения
S0 = S, где S —расстояние, проходимое судном относительно грунта.
В приложении 4 МТ-75 есть таблица, реализующая формулу (2.34).
Если поправка лага известна, то пройденное расстояние в море может быть получено из (2.34) так:
ΔЛ
 Sл = РОЛ(1 +) (2.36)
Sл = РОЛ(1 +) (2.36)
Теперь к обозначению расстояния добавляют индекс «л». Это означает, что оно рассчитано по показаниям лага.
Вместо поправки часто используют коэффициент лага:
ΔЛ Sл

 КЛ = 1 + = (2.37)
КЛ = 1 + = (2.37)
РОЛ
Sл = РОЛ Кл (2.38)
Скорость судна и правильность работы лага, т.е. поправка лага определяются на ходовых испытаниях. Задача определения скорости заключается в том, чтобы получить ее относительно воды, исключая скорость течения, которую не учитывает относительный лаг, а потому ветер и волнение должны быть минимальны. В соответствии со стандартными рекомендациями волнение должно быть не более трех баллов, скорость ветра - до 8 м/с, глубина моря, не менее шести средних осадок судна.
Необходимо иметь в виду, что относительный лаг учитывает продольную составляющую вектора скорости ветрового дрейфа судна VП, но сложность ее исключения из результатов измерении накладывает ограничения на силу ветра при скоростных испытаниях.
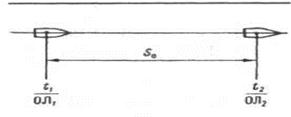
Скоростные испытания должны проводиться для всех режимовработы двигателя: полного, среднего, малого и самого малого хода. Загрузка должна быть нормальной, в полном грузу и в балласте. Определение скорости и поправки лага производится на мерной линии, которая представляет специальный полигон, оборудованный секущими, а иногда и ведущими створами. Одновременно с V0 и ΔЛ на мерной линии фиксируют количество оборотов винта N, соответствующих измеренной скорости, чтобы в море иметь дополнительный источник информации для определения относительной скорости судна по числу N.
Развив необходимую скорость, судно ложится на ИК пробега, который должен быть перпендикулярен секущим створам. При их пересечении с помощью секундомера засекаются время t1 и t2, а также отсчеты лага ОЛ1, и ОЛ2.
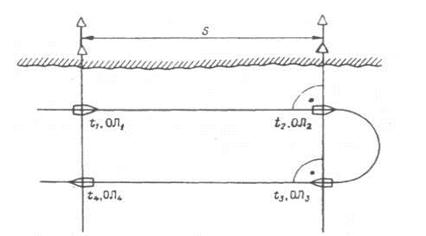 Рис. 2.15
Рис. 2.15
Небольшое рыскание в пределах 3° не окажет заметного влияния на точность результата, так как cos3° ≈ 0,999.
Скорость судна при отсутствии течения рассчитывают по известным соотношениям:
t = t2 – t1 (2.39)
S
 V = V0 = 3600 (2.40)
V = V0 = 3600 (2.40)
T
Поправку и коэффициент лага получают из формул (2.34)...(2.37), одновременно фиксируя величину N.
После пересечения второго секущего створа судно отворачивает на 10...15° в сторону моря и совершает плавную циркуляцию для выхода на обратный курс (рис. 2.15).
Промежутки времени между пробегами должны быть определены с учетом времени разгона судна, так как на циркуляции может происходить потеря скорости до 40...50%.
Теоретически при отсутствии течения для определения скорости и поправки лага достаточно одного пробега. Если же в районе испытании существует постоянное течение, то для его исключения необходимо произвести аналогичные измерения на обратном курсе.
В таком случае осреднение результатов исключает влияние течения. Предположение об отсутствии постоянного течения на мерной линии практически невыполнимо, поэтому для большей надежности испытаний рекомендуется выполнять всегда два пробега на противоположных курсах.
Покажем, что осреднение результатов действительно исключает влияние постоянного течения при двух пробегах. Для упрощения рассуждений будем оперировать скоростными треугольниками.Еcли судно выдерживает по компасу заданные направления пробегов, которые отличаются на 180°, то проекция вектора скорости постоянного течения V'Т на эту линию будет одинакова в первом и во втором случаях, (рис. 2.16). Приняв относительную скорость на пробегах V1 и V2, можно рассчитать относительную скорость:
V1 + v'T + V2 - v'T V1 + V2

 V0 = = (2.41)
V0 = = (2.41)
2 2
Результат говорит о том, что при скоростных испытаниях необходимо пользоваться компасом для удержания направления движения, а не ведущими створами.
Соответственно поправка лага при двух пробегах рассчитается и
как средняя поправка:
ΔЛ1 + ΔЛ2
 ΔЛ = (2.42)
ΔЛ = (2.42)
где ΔЛ1, ΔЛ2 — поправки, включающие погрешности от не исключенного вектора скорости постоянного течения.
Так же рассчитывают и средние обороты винта для данного режима работы двигателя:
N1 + N2
 N = (2.43)
N = (2.43)
Постоянство вектора скорости течения легко проверяется третьим пробегом. Критерий проверки: РОЛ1 = РОЛ3, или t1 + t3.
При постоянном ускорении течения рекомендуется выполнять три пробега и использовать для осреднения следующие формулы:
V1 + 2V2 + V3
 V0 = (2.44)
V0 = (2.44)
ΔЛ1 + 2 ΔЛ2 + ΔЛ3
 ΔЛ = (2.45)
ΔЛ = (2.45)
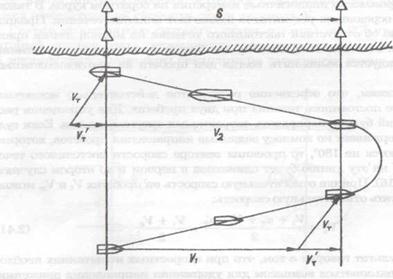
Рис. 2.16
Четыре пробега дадут возможность частично скомпенсировать непостоянство вектора ускорения течения, тогда расчет производится по следующим формулам:
V1 + 3V2 + 3V3 + V4
 V0 = (2.46)
V0 = (2.46)
ΔЛ1 + 3ΔЛ2 + 3ΔЛ3 + ΔЛ4
 ΔЛ = (2.47)
ΔЛ = (2.47)
После измерений определяются средние значения N и КЛ по аналогичным зависимостям. Применение формул (2.44)...(2.47) не обеспечивает полное исключение вектора скорости течения, но остаточная систематическая погрешность поглощается случайными погрешностями измерений, поэтому на практике они работоспособны.
Точность определения скорости на мерной линии можно получить из формулы V0 = S/t стандартным приемом вычисления среднейквадратичной погрешности функции (операция взятия математического ожидания) при условии, что погрешности, оставшиеся от исключения течения, пренебрежимо малы:
 (2.48)
(2.48)
Как видим, тV0 зависит от длины пробега S.
Полагая, что в (2.48) можно принять тs= 0, так как расстояниеизмеряют с карты с высокой точностью, относительная погрешность измерения скорости
mV0
 = 0,5%
= 0,5%
V0
а mt = 1,5 c, получим выражение для оптимальной длины пробега в милях при данных условиях и скорости судна в узлах:
V0
 S = (2.49)
S = (2.49)
Формулу точности определения поправки лага, %, получим из формулы:
ΔЛ Sл

 Кл = 1 + =
Кл = 1 + =
РОЛ
В результате получим:
mРОЛ
 mΔЛ = S* 100 (2.50)
mΔЛ = S* 100 (2.50)
РОЛ2
Поправку лага ΔЛ в море можно определить с помощью радиолокационной станции (РЛС) и свободно плавающего буя или вехи.
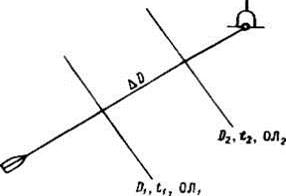
Рис. 2.17
В этом случае ложатся на курс, на плавающий ориентир, измеряют до него последовательные расстояния через 3...4 мили и фиксируют время (рис. 2.17), затем рассчитывают скорость и поправку лага:
D1 – D2 ΔD

 V0 = =
V0 = =
t2 – t1 t
Точность можно рассчитать, используя формулу (2.48), если положить mΔD = ms, а ΔD = S0:
 1
1
 mV0 = √m2ΔD + [ mt/ t *ΔD ]2
mV0 = √m2ΔD + [ mt/ t *ΔD ]2
t
Соответственно формула расчёта поправки лага, %, запишется так:
ΔD – РОЛ
 ΔЛ = * 100
ΔЛ = * 100
РОЛ
а точность расчета поправки определится формулой (2.50). Задаваясь погрешностями mΔЛ и mРОЛ и полагая, что можно принять
ΔD = S0 ≈ РОЛ, получим формулу для оценки величины ΔD:
mРОЛ
 ΔD = * 100
ΔD = * 100
mΔЛ
Например, если mРОЛ = 0,4 каб, а mΔЛ = 1%, то минимальное расстояние ΔD = 4 мили.
Для повышения точности результатов рекомендуется сделать несколько пробегов с последующим осреднением результатов. Поправка лага должна иметь точность не хуже 0,5%.
На судах, оборудованных гребными винтам регулируемого шага (ВРШ), испытания проводят при нескольких положениях лопастей для каждой скорости.
Преподаватель Нерубасский А.А.
ПЛАН
проведения практического занятия ПЗ № 4(4.1)
Тема: Ограждение навигационных опасностей плавучими предостерегательными знаками (ППЗ) по системе МАМС.
Оснащение: Класс навигационной прокладки с электрифицированным стендом для тренировок и опроса знаний ППЗ системы МАМС, Описание системы ограждения ППЗ системы МАМС. Изд. ГУНиО МО РФ Адм.№9029, Посібник «Опис системи плавучого огородження у водах України. Система МАМС. Регіон А». Видання Держгідрографії. Адм.№903.
AdmiraltyNavigationalPublicationNP735 IALAMaritimeBuoyageSystem, Edition 5 1994.
Цель занятия:
Знать: Описание ППЗ буев и вех системы МАМС, их вид, окраску, характеристику огней.
Уметь: Распознавать по окраске и характеристике огней ППЗ и их назначение. На МНК читать характеристику ППЗ.
План проведения занятия:
-опрос знания курсантами назначения, внешний вид и характеристику ППЗ системы МАМС по регионам;
-проверка знаний курсантов с помощью электрифицированного стенда.
Литература:
1. Ю.К. Баранов «Навигация». Учебник для вузов. СПб. Изд. «Лань» 1997- 349с(Гл.20.1 с.418).
2. М.И. Гаврюк «Задачник по навигации и лоции». М.;Транспорт, 1984-312с (Гл.12.1 с.232).
3. РШСУ-98.Приложение 2.с.73.
4. Ермолаев Г.Г.Морская лоция.М.:Транспорт,1982-392с. (Гл.5§17 с.68).








