 2015-04-23
2015-04-23 1593
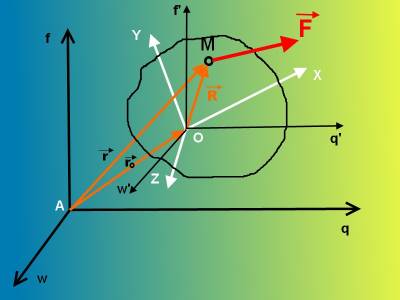
1593Представим инерциальную систему координат которую будем считать неподвижной (см.рис) А q f w. Относительно нее движется система координат
O x y z, связанная с неким телом. Рассмотрим движение материальной точки М массой m, на которую действует сила F. Для несвободной материальной точки нужно задать активную силу F и реакцию связи R. Движение этой материальной точки относительно неподвижной системы координат есть абсолютным, а относительно подвижной системы координат – относительным. Характер переносного движения устанавливается движением подвижной системы координат относительно неподвижной.
Уравнение движения несвободной материальной точки имеет вид
mwa=F+R
Абсолютное ускорение точки определим по теореме Кориолиса
wa=we+wr+wc
Подставим выражение wa в предыдущую формулу, тогда
mwe+mwr+mwc=F+R
Поскольку нас интересует уравнение относительного движения, то:
mwr=F+(-mwe)+(-mwc)+R. (1.1)
Векторы
Фe=-mwe, Фc=-mwc (1.2)
называют относительно переносной и кориолисовой силами инерции.
Если обозначения (1.1) использовать в уравнении (1.2),то оно приобретет привычную форму основного уравнения динамики (второго закона Ньютона)
mwr=F+R+Фe+Фc. (1.3.)
Из уравнения (1.3) видно, что для составления дифференциального уравнения движения материальной точки в неинерциальной системе координат в форме второго закона Ньютона необходимо к активным силам и реакциям связей, которые действуют на точку, добавить переносную и кориолисовую силы инерции.
Уравнение (1.3) называют основным уравнением динамики относительного движения материальной точки. Из этого уравнения можно сформулировать закон относительного движения:

