2015-05-12
2015-05-12 520
520Динамические системы описываются линейными дифференциальными уравнениями (ДУ).
Непрерывные системы – непрерывный сигнал на входе соответствует непрерывному сигналу на выходе.
Дискретные системы – описываются разностными уравнениями.
Нелинейные системы – если есть хотя бы один нелинейный элемент.
Система непрерывного действия – (непрерывная система) непрерывному входному сигналу соответствует непрерывный выходной сигнал.
Дискретные системы (импульсная) – непрерывным выходным сигналам соответствует выходная величина в виде отдельных импульсов. Относятся также цифровые системы.
Звено, которое преобразует непрерывный сигнал в импульсный, называется - импульсным звеном. Обратное преобразование – экстраполятором. Импульсные звенья осуществляют импульсную модуляцию или квантование по времени.
Пример:
· АИМ – амплитудно-импульсная модуляция
· ЧИМ – частотно-импульсная модуляция
· ФИМ – фазо-импульсная модуляция
· ШИМ – широтно-импульсная модуляция
Существуют их комбинации.

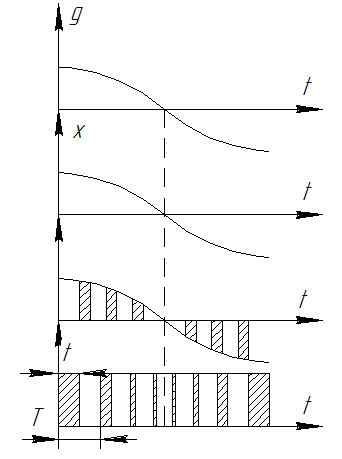
·  – скважность
– скважность
· t- ширина импульса
· T- период следования
Обыкновенные системы- системы с постоянными параметрами т.е. они описываются ДУ с постоянными коэффициентами.
Особые системы:
· системы с переменными параметрами – ДУ с переменными коэффициентами, т.е. коэффициенты являются функциями времени.
· С распределением параметрами - описываются ДУ с частными производными.
· С запаздыванием – описываются ДУ с запаздывающими аргументами.
Классификация по характеру процесса управления.
1)Стохастические
2)Детерминированные
Стохастические - или сигнал или параметры описываются случайными величинами.
Детерминированные – сигнал и параметры не являются случайными величинами.
Классификация по количеству сигналов и регулирование величин.
· Одномерные (односвязанные)
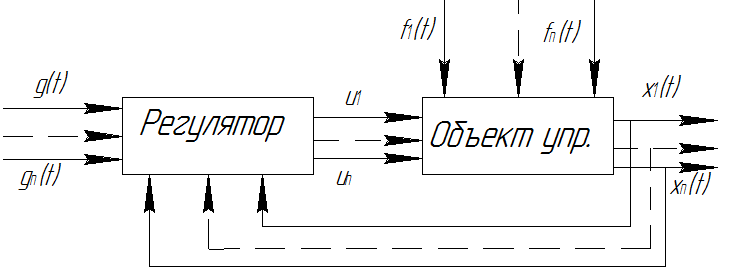
· Многомерные
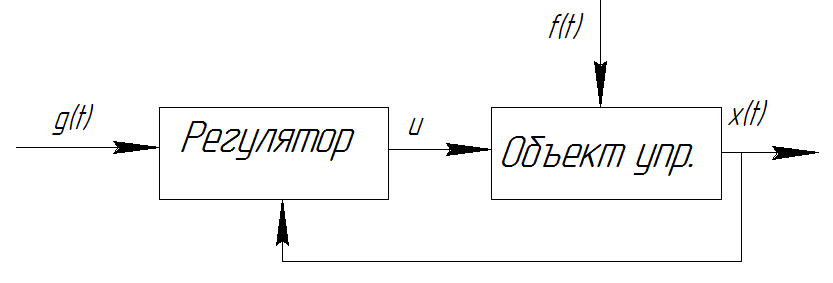
1)
2)Несколько задающих и несколько управляющих величин.
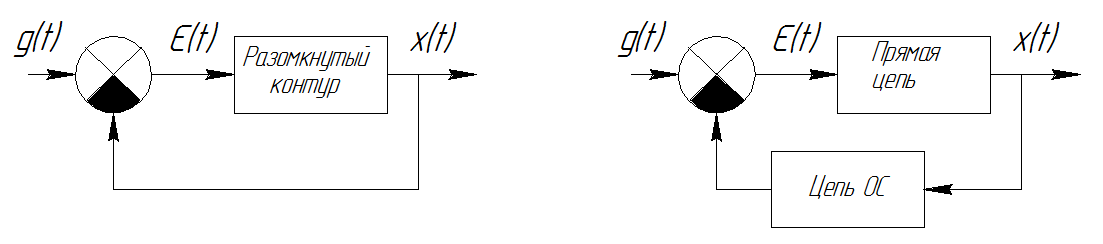
Типовая схема САР. Основная терминология.
3 вида схем:
· Функциональная – наиболее детальная, раскрытие физической реализации отдельных схем.
· Блок схема – наиболее формализованная, укрупненная.
· Структурная схема – графическое изображение математической модели системы.
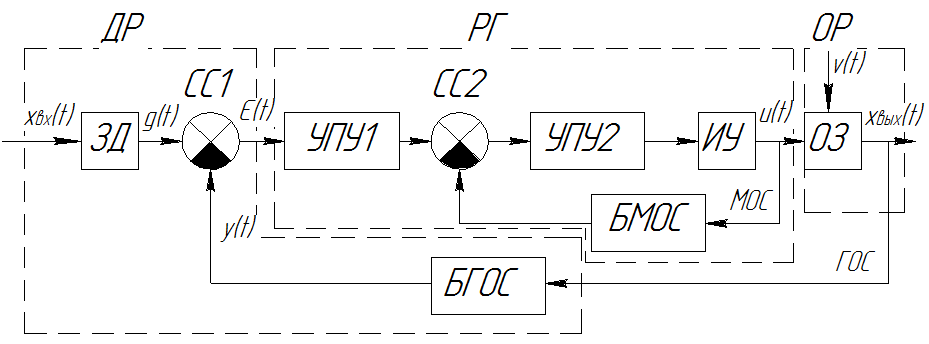
· ЗД – задатчик
· БГОС – блок главной обратной связи
· ГОС – главная обратная связь
· СС1, СС2 – схема сравнения
· ε (t) – ошибка, рассогласование
· x(t) –входное воздействие
· g(t) – задающее воздействие
· УПУ – усилительно-преобразующее устройство
· МОС – местная обратная связь
· БМОС – блок местной обратной связи
· ИУ – исполнительное устройство
· v(t) – возмущающее воздействие
· u(t) – регулирующее воздействие
· ОР – объект регулирования
· ДР – датчик рассогласования
· РГ – регулятор
В этой схеме показана местная обратная связь, в которой находиться местная обратная связь внутри главной.
Выделяется внутренний и внешний контур управления.
Такие системы называются подчиненного регулирования.
Обычно ошибка внешнего контура вправления является задающей для внутреннего контура.