 2015-06-05
2015-06-05 8584
8584ЛЕКЦИЯ 9
Тема «КИП и автоматика холодильной машины»
Цель: Изучить устройство и принцип действия контрольно-измерительных приборов и приборов автоматики холодильных машин вагонов
1. Холодильные машины и установки конддиционированяе воздуха. Пигарев В.Е., Архипов П.Е. М., Маршрут, 2003.
2. Обучающая контролирующая программа «Кондиционирование воздуха в пассажирском вагоне».
План лекции:
1. Принципы автоматизации холодильных установок.
2. Основные понятия об автоматическом регулировании
3. Классификация и основные элементы
приборов автоматики.
4. Регуляторы заполнения испарителя хладагентом.
Принципы автоматизации холодильных установок
Параметры окружающей среды — температура, влажность, направление и сила ветра, осадки, солнечная радиация непрерывно изменяются в течение суток, а также вследствие быстрого перемещения вагона. Соответственно изменяется и тепловая нагрузка на вагон. Чтобы в этих условиях поддерживать стабильные параметры воздуха внутри вагона, необходимо непрерывно изменять производительность системы охлаждения (летом) или отопления (зимой), а если это необходимо, то и производительность системы вентиляции. Следовательно, как бы совершенны ни были сами по себе системы вентиляции, отопления, охлаждения и электроснабжения и как бы хорошо ни были согласованы их параметры между собой и с тепловыми нагрузками на вагон, установка кондиционирования воздуха не сможет обеспечить комфортных условий в вагоне, если её управление не будет автоматизировано, а холодильная машина обеспечивать требуемую тепловую обработку скоропортящегося груза и поддерживавать заданный температурный режим охлаждаемого помещения. На рефрижераторном подвижном составе применяются холодильные установки, автоматизированные полностью или частично. Степень автоматизации холодильной установки выбирается в зависимости от ее конструкции, размеров и условий эксплуатации. В полностью автоматизированных установках пуск, отключение машин и регулирование холодопроизводительности осуществляются автоматически без вмешательства обслуживающего персонала. Такими установками оборудованы АРВ и секции ZB -5. Для полной автоматизации требуются большие первоначальные затраты и последующие расходы на обслуживание сложных аппаратов и приборов. Однако полная автоматизация холодильных установок АРВ позволила отказаться от сопровождения вагонов в пути следования обслуживающим персоналом и перейти на периодическое их техническое обслуживание на специализированных пунктах (ПТО АРВ).
При эксплуатации частично автоматизированных холодильных установок необходимо постоянное дежурство обслуживающего персонала. Наличие персонала позволяет отказаться от автоматизации включения и выключения холодильной машины, процесса оттаивания воздухоохладителя и др. В результате достигается значительное снижение первоначальных затрат. Защитная же автоматика в таких машинах должна предусматриваться в полном объеме, как и для полностью автоматизированной установки.
Из частично автоматизированных установок условно выделяют полуавтоматизированные установки, в которых включение и выключение оборудования выполняет вручную механик, а поддержание установленного режима работы осуществляют приборы автоматики. К полуавтоматизированным холодильным установкам относятся установки 5- вагонной секции БМЗ.
Автоматизированные холодильные установки всегда работают в оптимальном режиме. Это позволяет сократить время достижения требуемой температуры в грузовом помещении, увеличить за счет этого межремонтные сроки эксплуатации оборудования и снизить расход электроэнергии. Автоматизированная холодильная установка точнее поддерживает заданный температурный режим в охлаждаемом помещении, чего невозможно достигнуть при ручном регулировании. Это позволяет сохранить качество перевозимых грузов и уменьшить их потери при транспортировке. Система автоматизации надежно защищает холодильную установку от опасных режимов работы, увеличивая срок ее службы и обеспечивая безопасность для обслуживающего персонала. Автоматизация повышает культуру производства, улучшает и облегчает условия труда обслуживающего персонала. Практически обязанности поездной бригады сводятся к периодическим осмотрам и проверкам режима работы оборудования и к устранению выявленных неисправностей. Естественно, системы автоматики различны. Применительно к системам автоматики установки кондиционирования воздуха можно классифицировать по трем признакам: по регулируемым параметрам воздуха: по температуре или по влажности, или по обоим этим параметрам, т.е. по теплосодержанию; по характеру процесса обработки воздуха: мокрые камеры увлажнения и осушки с непосредственным разбрызгиванием и фильт189 рацией паровоздушной смеси, или камеры со смачиванием поверхности и также непосредственным тепломассообменом, или камеры с применением теплообмена через холодную (или горячую) стенку, охлаждаемую холодной водой или рассолом (нагреваемую горячей водой или рассолом), или камеры с воздухоохладителями непосредственного охлаждения, или камеры с твердыми или жидкими влагопоглотителями — адсорбентами; по схеме обработки воздуха: прямоточные камеры (без использования рециркуляции), или камеры с постоянной или переменной величиной первичной рециркуляции, или камеры с двойной рециркуляцией постоянной или переменной. Специальное устройство для регулирования влажности (специальная осушка воздуха осуществляется более глубоким его охлаждением, чем необходимо для поддержания температурного режима с последующим подогревом) в вагонных установках кондиционирования воздуха не применяется. Летом, когда требуется осушка воздуха, она выполняется одновременно с процессом его охлаждения в воздухоохладителе. Зимой, когда необходимо увлажнение воздуха, оно осуществляется за счет влаговыделения пассажиров. Таким образом, по первому признаку процесс автоматического регулирования работы вагонных установок кондиционирования является наиболее простым и сводится к поддержанию температуры в помещениях вагона в заданных пределах. Мокрые камеры, твердые и жидкие адсорбенты, теплообмен с помощью водяного или рассольного охлаждения в пассажирских вагонах не применяются. Из этого следует, что и по второму признаку системы автоматики вагонных кондиционеров довольно просты. Ни переменная, ни тем более двойная рециркуляция как постоянная, так и переменная, в вагонах не применяется. Наличие рециркуляции с постоянным соотношением наружного и рециркуляционного воздуха усложняет лишь систему вентиляции, не внося каких-либо из-менений в систему автоматического управления. Таким образом, и по третьему признаку, а значит, и в целом системы автоматики установок кондиционирования пассажирских вагонов по сравнению с системами автоматики других кондиционеров как комфортных, так и технологических, являются относительно простыми. Для поддержания температуры в охлаждаемом помещении в заданном интервале приходится регулировать холодопроизводительность установки, рассчитанную на максимальную потребность в холоде. Регулиро-вание может быть плавным или позиционным (ступенчатым).
Плавное регулирование можно выполнить: плавным изменением частоты вращения вала компрессора; перепуском (байлансированием) пара из нагнетательной линии во всасывающую; изменением рабочего объема компрессора (в винтовых компрессорах); открытием всасывающего клапана на части хода поршня и др. Многие из перечисленных выше способов применяются редко из-за сложности их конструкционного осуществления или из-за значительных энергетических потерь.
Позиционное регулирование можно выполнять изменением коэффициента рабочего времени, т.е. изменением продолжительности работы холодильной установки за цикл. Этот способ широко применяется в системах с большой тепловой аккумулирующей способностью. Позиционное регулирование выполняется также ступенчатым изменением частоты вращения коленчатого вала компрессора, используя многоскоростные электродвигатели. Частоту вращения вала электродвигателя изменяют переключением полюсов статора. На рефрижераторном подвижном составе применяется регулирование холодопроизводительности изменением коэффициента рабочего времени. Цикличная работа холодильной установки достигается периодическими ее включениями и выключениями. Отношение времени работы холодильной установки р к общей продолжительности цикла называется коэффициентом рабочего времени: b = р / .
Коэффициент рабочего времени можно также определить как отношение теплопритоков в охлаждаемое помещение Q т к холодопроизводительности установки Q 0, т.е. b = Qт / Q 0.
Температуру в охлаждаемом помещении рефрижераторных вагонов обычно регулируют периодическими включениями и отключениями холодильной установки с помощью двухпозиционного автоматического прибора — термостата (реле температуры). При цикличной работе температура в охлаждаемом помещении не остается постоянной, а изменяется в определенных пределах, которые зависят от настройки дифференциала термостата. При увеличении дифференциала продолжительность цикла и пределы колебания температуры увеличиваются. Когда температура в охлаждаемом помещении достигнет верхнего установленного предела, термостат включит холодильную установку. После того как температура в охлаждаемом помещении достигнет нижнего предела, термостат подает электрический импульс на отключение установки. При увеличении теплопритоков в вагон продолжительность работы установки повышается.
2. Основные понятия
об автоматическом регулировании
Система автоматического управления — это совокупность объекта управления и управляющего устройства, осуществляющих какой-нибудь процесс полностью или частично без вмешательства обслуживающего персонала. Объект управления — комплекс технических элементов, выполняющих основную технологическую задачу — характеризуется значениями некоторых величин на его входе и выходе. Если в качестве объекта управления рассматривать рефрижераторный вагон, то величиной на выходе будет температура в грузовом помещении t ваг, а величиной на входе — холодопроизводительность холодильной машины Q 0. Величину на выходе, которую требуется поддерживать в определенном интервале, называют регулируемым параметром и обозначают X 0. Величина на входе объекта — это параметр, с помощью которого управляют значением величины на выходе. Внешнее воздействие на объект управления, вызывающее отклонение регулируемого параметра от исходного значения Х 0, называется нагрузкой. В данном случае это будут теплопритоки в вагон Q н. Действительное значение регулируемого параметра X под воздействием нагрузки Q н отклоняется от заданного значения X 0. Такое отклонение называется рассогласованием: Х=Х – X 0. Воздействие на объект, которое уменьшает рассогласование Х, является регулирующим воздействием. В нашем примере это будет холодопроизводительность машины Q 0. Если Q 0 = Qн, то Х = 0, а регулируемый параметр не изменяется: Х 0 — const.
Устройство, воспринимающее рассогласование АХ и воздействующее на объект для уменьшения рассогласования, называется автоматическим регулятором, или просто регулятором.
Объект и регулятор образуют систему автоматического регулирования (рис. 1).
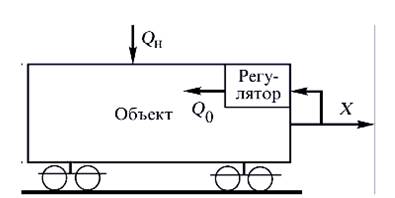
Рис. 1. Система автоматического регулирования
Регулирование может выполняться по нагрузке и рассогласованию. В первом случае регулятор
воспринимает изменение нагрузки и на столько же изменяет регулирующее воздействие, поддерживая равенство Q 0 = Qн. Однако проще следить за отклонением регулируемого параметра Х 0, т.е. изменять регулирующее воздействие Q 0 в зависимости от значения Х.
Системы автоматизации различаются по своему назначению: управления, сигнализации, защиты, регулирования и комбинированные. Между собой они отличаются составом элементов и связями между, ними. Структурная схема автоматической системы определяет, из каких звеньев она состоит. Например, в систему автоматического регулирования входят объект регулирования и автоматический регулятор, состоящий из нескольких элементов — чувствительного элемента, задающего устройства, элемента сравнения, регулирующего органа и т.д. На рис. 2 показана простая одноконтурная система автоматического регулирования, широко применяющаяся при автоматизации холодильных установок. Работа объекта характеризуется параметром X на выходе, по которому ведется регулирование. На объект воздействует внешняя нагрузка Q н. Управление осуществляется регулирующим воздействием Q 0. Автоматический регулятор должен так изменять величину Q 0, чтобы значение X. соответствовало заданному Х 0. В системе имеются цепи прямой и обратной связи. Цепь прямой связи служит для формирования и передачи к объекту регулирующего воздействия Q 0; по цепи обратной связи поступает информация о ходе процесса. В цепь прямой связи входят усилитель (У), исполнительный механизм (ИМ ) и регулирующий орган (РО). В цепь обратной связи включен чувствительный элемент (ЧЭ ).
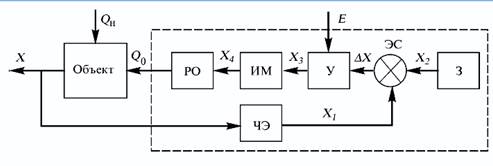
Рис. 2. Структурная схема автоматического регулирования
Обе цепи замыкаются элементом сравнения (ЭС). В регуляторе могут не применяться отдельные элементы (усилитель, исполнительный механизм). Некоторые детали могут выполнять функции нескольких элементов.
Система работает следующим образом. Чувствительным элементом регулятор воспринимает регулируемый параметр X и преобразует его в величину Х 1, удобную для дальнейшей передачи.
Эта преобразованная величина поступает в элемент сравнения, на другой вход которого подается сигнал Х 2, представляющий собой задание регулятору от устройства 3. В элементе сравнения производится операция вычитания, в результате которой получается рассогласование Х = X – Х 0.
Сигнал Х заставляет работать остальные элементы схемы. В усилителе его мощность повышается до Х 3 и воздействует на исполнительный механизм, который преобразует этот сигнал в удобный для использования вид энергии X 4 и изменяет положение регулирующего органа. В результате изменяется поток энергии или вещества, подводимого к объекту, т.е. изменяется регулирующее воздействие.
По взятому для примера рефрижераторному вагону можно проследить за взаимодействием элементов структурной схемы (рис. 1 и 2).
Температуру в вагоне X воспринимает термочувствительная система термостата, преобразует ее в давление Х 1 и воздействует на пружину термостата ЭС, отрегулированную на определенное усилие сжатия винтом задающего устройства 3. При повышении температуры в вагоне t ваг в результате теплопритоков Q н увеличивается рассогласование X.
При определенном значении t ваг замыкаются контакты термостата, включающие электрическую систему управления холодильной машиной У, которая получает энергию Е от внешнего источника. Исполнительные механизмы ИМ электрической системы включают холодильную машину РО, которая воздействует величиной Q н на объект. Структурные схемы других автоматических устройств можно получить из рассмотренной схемы. Сигнализирующая система отличается от системы регулирования тем, что в ней нет исполнительного механизма. Цепь прямой связи разрывается, и сигнал Х3 подается обслуживающему персоналу (звонок, включение сигнальной лампы), который и должен произвести регулирование. В системе автоматической защиты вместо исполнительного механизма и регулирующего органа имеется устройство управления, которое отключает холодильную установку. В системах сигнализации и защиты сигнал Х3 изменяется скачкообразно, когда величина X достигает заданного значения. Автоматические регуляторы классифицируются по назначению: регуляторы давления, температуры, уровня и т.д. Они различаются конструкцией чувствительного элемента. Регуляторы бывают прямого и непрямого действия. Если мощность сигнала рассогласования достаточна для воздействия на регулирующий орган, регулятор считается прямодействующим. В регуляторах непрямого действия для привода регулирующего органа используется внешний источник энергии Е (электрический, пневматический, гидравлический, комбинированный), подводимой через усилитель мощности У.
В зависимости от способа воздействия на объект различают регуляторы плавного и позиционного (релейного) действия. В регуляторах плавного действия регулирующий орган может занять любое положение в пределах между максимальным и минимальным. У позиционных регуляторов регулирующий орган может занимать два или несколько определенных положений. По типу задающего элемента регуляторы бывают стабилизирующие, программные, следящие, оптимизирующие. Стабилизирующие регуляторы поддерживают регулируемую величину на постоянном заданном уровне. Программные регуляторы изменяют регулируемую величину по заранее намеченной программе, следящие — в зависимости от изменений какого-нибудь внешнего параметра, Оптимизирующие регуляторы, анализируя внешние параметры, обеспечивают оптимальное ведение процесса. В холодильных установках чаще применяются стабилизирующие регуляторы.
Система регулирования согласовывает характеристики отдельных элементов машины при изменений их холодопроизводительности.
Характеристики представляют собой зависимости холодопроизводительности, расхода энергии на работу компрессора и охлаждение конденсатора от внешних условий, т.е. от температуры окружающей среды. Они позволяют установить взаимную связь параметров компрессора, испарителя и конденсатора. Построение характеристик проводят по уравнениям теплового баланса системы «холодильная машина — охлаждаемое помещение» и энергетическим соотношениям, описывающим работу основных элементов машины с учетом изменения по времени параметров хладагента и окружающей среды. При этом балансовые и энергетические соотношения представляют в функции температуры охлаждаемого объекта (температуры кипения хладагента) и температуры окружающей среды (температуры конденсации хладагента).
Процесс регулирования машины на требуемый режим охлаждения или на заданный температурный режим теоретически может быть реализован количественным или качественным способом. Первый предусматривает изменение расхода хладагента через испаритель, второй — изменение его параметров. Однако температура охлаждаемого объекта определяется температурой кипения хладагента, которая самоустанавливается в зависимости от холодопроизводительности компрессора, испарителя и конденсатора. Поэтому процесс регулирования определяет не только баланс холодопроизводительности компрессора Q oк и испарителя Q ои, но и температурный уровень отвода или подвода теплоты. Следовательно, регулирование паровой компрессорной машины представляет собой комбинированный процесс, сочетающий количественный и качественный способы.
Исполнительным органом системы регулирования (регулятором холодопроизводительности) служит дроссельный вентиль. Рабочий режим машины, который соответствует точке пересечения характеристик компрессора и испарителя Q oк = Q ои, обеспечивают изменением проходного сечения вентиля. Схема согласования характеристик основных элементов машины при некотором постоянном значении температуры окружающей среды приведена на рис. 3.
Характеристика испарителя Q oк = f (T 0) (T 0 — температура кипения хладагента) отвечает изменению теплопритоков охлаждаемого помещения, характеристика компрессора Q ок = f (T 0) — регулированию его производительности, расходная характеристика дроссельного вентиля Q дв = f (T 0) устанавливает степень его закрытия или открытия. Характеристики перечисленных элементов машины при изменении режима ее работы показаны штриховыми линиями. Точка А определяет рабочую точку системы «машина — охлаждаемое помещение» как объекта регулирования при переходе с одного режима работы на другой. При этом точка А ′соответствует рабочему режиму в процессе регулирования компрессора, а точка А ′′ — при изменении характеристики испарителя. Регулирование холодопроизводительности машины с поршневым компрессором осуществляют плавным или ступенчатым (позиционным) регулированием его производительности. В машинах малой и средней мощности получили распространение следующие способы плавного регулирования с помощью внешних или встроенных конструктивных устройств: перепуск хладагента со стороны нагнетания на всасывание (балансирование), который осуществляют регулирующими вентилями, управляемыми от датчика давления или температуры; дросселирование на всасывании с переводом компрессора на работу при пониженном давлении всасывания; изменение объема мертвого пространства подключением к нему дополнительного внешнего объема; изменение частоты вращения вала компрессора.
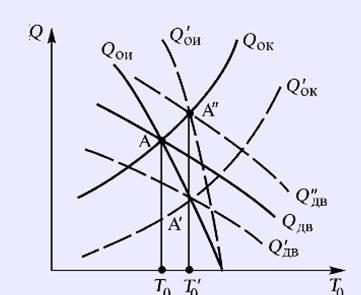
Рис. 3. Характеристики основных элементов холодильной машины
Ступенчатое регулирование в машинах малой и средней холодопроизводительности в основном выполняют способом «пуск-остановка» с предельной частотой циклов до 5-6 в 1 ч; для многоступенчатых компрессоров эффективно используют отключение отдельных цилиндров путем отжатия всасывающих клапанов с помощью механических толкателей. Управление движением толкателей производят гидравлическими, пневматическими или электромагнитными приводами. Внедряется система электронного регулирования производительности с воздействием на всасывающие клапаны электромагнитного поля.
Примером ступенчатого пропорционального регулирования является регулирование температуры воздуха в вагоне летом, когда с увеличением теплопритока в вагон увеличивается холодопроизводительность холодильной установки (увеличиваются частоты вращения вала компрессора или включается большее количество его цилиндров). В этом случае импульсом, сигнализирующим необходимость увеличения холодопроизводительности, является дальнейшее повышение температуры воздуха в вагоне.
Пример пропорционального плавного регулирования — регулирование температуры воздуха в вагоне зимой, когда с увеличением теплопотерь вагона плавно увеличивается температура воды в котле водяного отопления. В этом случае импульсом, сигнализирующим необходимость повышения температуры воды в котле, является изменение температуры наружного воздуха. Наиболее совершенным, но и наиболее сложным видом пропорционального регулирования является изодромное регулирование, основанное на применении чувствительной и гибкой обратной связи, благодаря которой регулируемый параметр изменяется в очень узких пределах или даже держится на практически постоянном уровне. Первоначально изодромное регулирование применялось для обеспечения постоянной скорости вращения деталей машин, откуда и получило свое название (по-гречески изо — постоянный, равный; дромос — бег, скорость). В настоящее время оно применяется в самых различных процессах, например, для автоматического вождения морских кораблей по заданному курсу.
Вследствие сложности аппаратуры, трудных условий ее работы при вибрации и тряске, а главное из-за отсутствия практической необходимости в предельно точном регулировании температуры воздуха, в установках кондиционирования воздуха вагонов изодромное регулирование не применяется.
При выборе способа регулирования необходимо учитывать начальные и эксплуатационные затраты, технологичность и надежность конструкции. Для оценки энергетической эффективности системы регулирования используют отношение холодопроизводительности компрессора при заданной степени регулирования к номинальной: =qop/qон = f(T 0 ). Показатели сравнительной эффективности основных способов регулирования производительности поршневых компрессоров приведены на рис. 4. Для способов пуск-остановка (линия 1) и отжатие впускных клапанов (линия 2) характерны малые энергетические потери и практическая независимость от режима работы. При дросселировании на всасывании (линия 3) наблюдается резкое падение эффективности с ростом температуры кипения хладагента, поэтому этот способ применяют в компрессорах, которые работают в узком диапазоне давлений кипения. Балансирование (линия 4) — наименее эффективный вариант регулирования, так как он связан с потерями энергии сжатого пара при его перепуске, повышением температуры всасывания хладагента, а следовательно, и температуры нагнетания; энергетические потери при этом способе соответствуют степени уменьшения холодопроизводительности машины.
В холодильных машинах с винтовыми компрессорами используют следующие способы регулирования холодопроизводительности: дросселирование на всасывании, балансирование, изменение частоты вращения вала, золотниковой системой.
Дросселирование обеспечивают автоматическим перекрытием дроссельного клапана, установленного на входе в компрессор. Эффективность этого способа ограничена снижением производительности до 70% от номинальной; при более глубоком дросселировании существенно снижается экономичность.
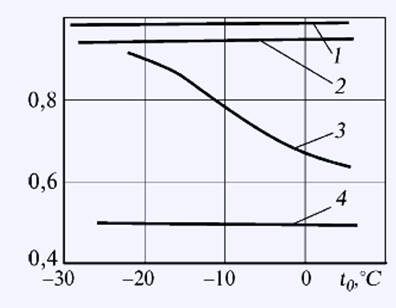
Рис. 4. Энергетическая эффективность основных способов регулирования производительности поршневых компрессоров
Балансирование осуществляют перепуском части хладагента через безопасный клапан со стороны нагнетания на всасывание.
Применение такого способа обычно ограничивают компрессорами сухого сжатия.
Наиболее экономичное регулирование путем отключения в процессе сжатия части объема рабочих полостей обеспечивает золотниковая система. Несмотря на усложнение конструкции компрессора, такая система открывает дополнительные схемные возможности усовершенствования паровых холодильных машин.
Автоматизация работы холодильной машины позволяет с высокой точностью поддерживать требуемый уровень параметров процесса охлаждения, отвечающий оптимальному технологическому режиму, а также частично или полностью исключить участие обслуживающего персонала в эксплуатации холодильного оборудования.
В паровых компрессорных машинах объектами автоматизации являются теплообменные аппараты, в частности степень заполнения испарителя жидким хладагентом и давление процесса конденсации. Объективным и технически наиболее удобным показателем, отражающим степень заполнения испарителя, служит перегрев пара
на выходе из него. Действительно, когда часть теплопередающей поверхности испарителя обеспечивает перегрев паров хладагента, уменьшение его подачи приводит к снижению степени заполнения, а следовательно, к росту перегрева. При этом повышение температуры перегрева сверх расчетного уровня ухудшает энергетические показатели машины и надежность ее работы. Подача хладагента в испаритель в количестве, превышающем возможности процесса теплопередачи, связана с переполнением испарителя и снижением перегрева. Последнее приводит к снижению холодопроизводительности машины, а в ряде случаев к работе компрессора на влажном паре, что может привести к гидравлическому удару.
Системы автоматического регулирования степени заполнения испарителя по перегреву паров хладагента выполняют плавными и позиционными (обычно двухступенчатыми). В качестве автоматического регулирования в плавных системах широко используют терморегулирующие вентили (ТРВ), в которых величину перегрева паров хладагента получают в виде разности между температурой пара, выходящего из испарителя, и температурой кипения хладагента. Терморегулирующие вентили, обеспечивающие процесс дросселирования хладагента от давления конденсации до давления испарения, устанавливают на линии между конденсатором и испарителем.
Принципиальная схема автоматического регулирования уровня хладагента в испарителе с помощью ТРВ, используемая в хладоновых машинах РПС, приведена на рис. 5. Чувствительный элемент измерительной головки 1 терморегулирующего вентиля, выполненный в виде мембраны 2 или сильфона, находится под воздействием разности давлений перегретого пара, соответствующего температуре перегрева, и хладагента на выходе из испарителя 7, отвечающего температуре кипения. Перегретый пар, который образуется в термосистеме, состоящей из термобаллона 6 и капилляра 3, поступает в пространство над мембраной; пространство под мембраной связывают уравнительной трубкой 4 с всасывающей линией компрессора 5. При этом уравнительную трубку присоединяют к всасывающей линии в месте установки термобаллона. В некоторых конструкциях в термобаллон вводят твердый поглотитель и всю термосистему заполняют газом.
Перемещение штока 12 в результате деформации чувствительного элемента при изменении температуры перегрева обеспечивает открытие или закрытие запорного клапана 11, регулирующего поступление жидкого хладагента из конденсатора в испаритель по линии 10. С помощью регулировочного винта 8 изменяют силу затяжки пружины 9 и, следовательно, необходимую величину температуры перегрева. В процессе автоматического регулирования ТРВ должен обеспечить оптимальный уровень заполнения испарителя и устойчивость системы во всем требуемом диапазоне изменения холодопроизводительности, что особенно важно для холодильных машин рефрижераторного подвижного состава. Практически устойчивая работа системы ТРВ начинается при перегреве (3 6) К. Для расширения диапазона регулирования и повышения его устойчивости в системе может быть использовано несколько ТРВ.
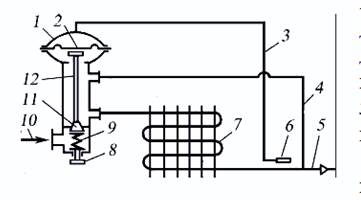
Рис. 5. Схема автоматического регулирования уровня хладагента в испарителе с помощью ТРВ
Процесс автоматического регулирования давления конденсации хладагента в машинах с конденсаторами воздушного охлаждения осуществляют изменением скорости или расхода охлаждающего воздуха.
Технически его обеспечивают системой жалюзи или поворотных заслонок, использованием вентиляторов с изменяемым углом установки направляющих лопаток, применением двухскоростных электродвигателей, а также периодическим выключением вентиляторов. Изменение скорости или расхода охлаждающего воздуха приводит к изменению коэффициента теплопередачи конденсатора, а следовательно, к
изменению температуры и давления процесса конденсации.
В ряде случаев повышения температуры конденсации добиваются частичным подтоплением поверхности конденсатора жидким
хладагентом.
Приборы автоматического регулирования, помимо контроля параметров испарителя и конденсатора, поддерживают заданную температуру воздуха в охлаждаемом помещении, обеспечивают своевременное удаление инея («снеговой шубы») с поверхности испарителя, регулируют уровень масла в маслоотделителях и т.д. Работу системы регулирования сочетают с автоматической защитой, которая включает комплекс мер по безопасной эксплуатации холодильных машин и предупреждает аварийные режимы путем отключения машины.
Система автоматической защиты включает соответствующие датчики (реле защиты и устройства для преобразования импульсов от этих реле в сигнал остановки). В ряде случаев систему защиты дополняют блокировкой, которая исключает повторный пуск машины без устранения причины, вызвавшей срабатывание защиты.
В компрессорных холодильных машинах датчики системы защиты следят за уровнем максимального давления и температуры хладагента на нагнетании компрессора, минимального давления на всасывании, за давлением и температурой масла в системе смазки, за работой электродвигателя, исключающей его перегрузку или короткое замыкание. В систему, автоматической защиты может быть введена световая или звуковая сигнализация, оповещающая о достижении предельного значения контролируемой величины или приближения к опасному режиму работы машины.
3. Классификация и основные элементы
приборов автоматики
По назначению приборы автоматики можно разделить на четыре основные группы: регулирования, защиты, контроля, сигнализации.
Приборы автоматического регулирования обеспечивают включение или выключение холодильной установки и отдельных ее аппаратов, а также управляют процессами работы. В холодильных установках подвижного состава приборы регулирования осуществляют следующие функции: правильно заполняют испаритель хладагентом (терморегулирующие вентили и др.); поддерживают температуру в охлаждаемых помещениях в заданных интервалах (термостаты, дуостаты); регулируют давление в конденсаторе в заданном интервале (прессостаты); обеспечивают своевременное оттаивание инея с испарителя (прессостаты, программные реле, термостаты); открывают или прекращают подачу жидкого или парообразного хладагента (электромагнитные вентили, обратные клапаны); ограничивают поступление хладагента в компрессор из испарителя (регуляторы давления всасывания).
Приборы автоматической защиты выключают всю холодильную установку или отдельные аппараты при наступлении опасных режимов работы: при достижении предельно допустимого давления нагнетания (прессостаты); при вакууме на стороне всасывания (прессостаты); при падении давления масла в системе смазки компрессора (релеразности давлений); при низкой температуре масла в картере компрессора (термостаты); при высокой температуре паров хладагента, сжатых в компрессоре (реле температуры); при перегрузке электродвигателя или коротком замыкании (тепловые реле, автоматические выключатели, плавкие предохранители).
Приборы автоматического контроля осуществляют измерения, а в некоторых случаях и записи определенных параметров работы холодильной установки, например температуры в охлаждаемом помещении (термограф), расхода электроэнергии (электросчетчик), времени работы оборудования (счетчики моточасов) и др. Приборы автоматической сигнализации включают световые или звуковые сигналы при достижении заданного значения контролируемой величины или при приближении к опасному режиму работы машины.
Приборы автоматики состоят из следующих основных частей: чувствительного элемента (датчика), передающего механизма, регулирующего (рабочего) органа, устройства для настройки (задатчика). Чувствительный элемент воспринимает контролируемую величину (температуру, давление, уровень жидкости и т.п.) и преобразует ее в удобный вид энергии для дистанционной передачи. Передающий механизм соединяет чувствительный элемент с регулирующим (рабочим) органом.
Регулирующий орган действует по сигналу чувствительного элемента. В приборах двухпозиционного действия (реле) рабочий орган может занимать только два положения. Например, электрические контакты реле давления (прессостата) или реле температуры (термостата) могут быть замкнуты или разомкнуты, клапан электромагнитного вентиля — закрыт или открыт. В приборах плавного (пропорционального) действия каждому изменению регулируемой величины соответствует перемещение регулирующего органа (например, плавное перемещение клапана регулирующего вентиля при изменении тепловой нагрузки на испаритель). Устройство для настройки прибора устанавливает заданное значение регулируемой или контролируемой величины. Отклонение регулируемой величины, не вызывающее перемещение регулирующего органа, называется зоной нечувствительности, или дифференциалом прибора. Чувствительные элементы приборов давления выполняются в виде сильфонов и мембран. Сильфон представляет собой тонкостенную гофрированную трубку. Изготавливают сильфоны из латуни, бронзы, нержавеющей стали. При изменении давления в сильфоне длина его может значительно изменяться. Мембраны изготавливают в виде круглых эластичных пластин, закрепленных по периметру. Мембраны могут быть упругие (металлические) и мягкие (резиновые, пластмассовые, из прорезиненных тканей).
204 Температурные чувствительные элементы выполняют в виде биметаллических пластин и термочувствительных систем с различными наполнителями. В элементах, основанных на расширении твердых тел при нагревании, температура преобразуется в механическое перемещение (дилатометрические элементы). Перемещение происходит за счет неодинаковых коэффициентов линейного расширения у различных металлов. На рис. 3.6 а, б показаны элементы с двумя металлическими деталями 1 и 2 из разного материала, на рис. 3.6 в, г — чувствительный элемент из биметалла, т.е. из двух слоев металлов, сваренных между собой.
В элементах с тепловым расширением жидкостей используется зависимость изменения объема жидкости от температуры. Датчики, заполненные ртутью (рис. 3.7, а, б), используются для преобразования температуры в электрический сигнал без промежуточной механической системы. Датчик на рис. 3.7, а имеет релейную характеристику, на рис. 3.7, б — плавную. Применявшиеся ранее на рефрижераторных поездах ртутноконтактные датчики температуры оказались недостаточно надежными, так как из-за вибраций и толчков на ходу появлялись разрывы ртутного столба и нарушалась электрическая цепь. Кроме того, ртутно-контактные датчики рассчитаны на малую электрическую мощность сигнала.
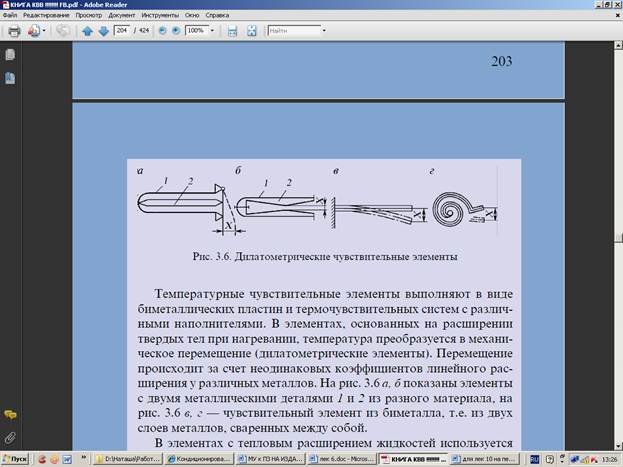
Рис. 3.6. Дилатометрические чувствительные элементы
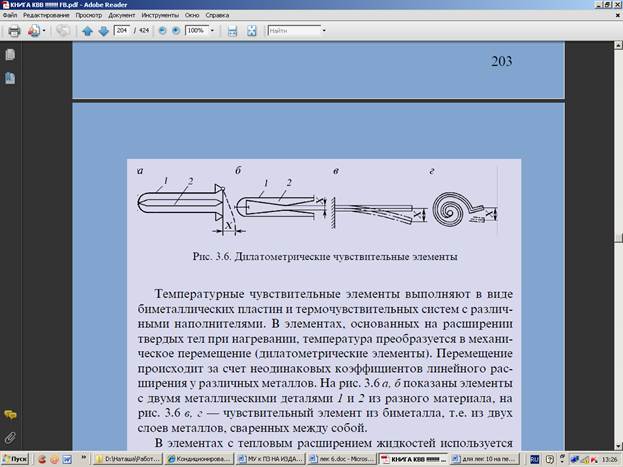
Рис. 3.7. Жидкостные
термочувствительные
элементы








