 2015-08-21
2015-08-21 505
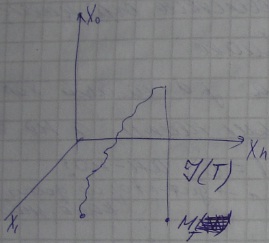
505dxi/dt = fi (x1…,xn,u(t),t), i=1,..,n; x(0)=M0 ; x(T)=MT
Требуется перевести динамическую систему из одного состояния в другое оптимальным образом, для определения критерия оптимальности рассмотрим функционал:
J=  1,..,xn,x1/,..,xn/(t),u(t))dt
1,..,xn,x1/,..,xn/(t),u(t))dt
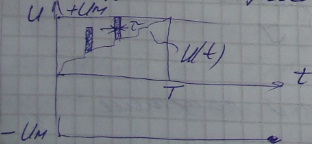
Управляющее воздействие ограничено: |u(t)| ≤ umax
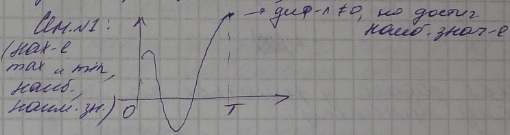
Значение функционала должно быть самым хорошим, т.е. наиб. или наим., а не то, где вариация = 0, аналогично:
Вводится вспомогательная переменная X0(t), dX0(t)/dt =F(t,X1,..,Xn/,U);
X0(t)=  => X0(0)=0, т.е. мы формируем нач. условие X0(t)=J
=> X0(0)=0, т.е. мы формируем нач. условие X0(t)=J
После ввода переменной получаем систему дифф. ур-ий:
dxi*/dt =fi(), i=0,1…, n
x*= 
Т.е. м. избавиться от t
Такая задача должна решаться по общему принципу:
если приращение ф-ла ’’-’’, то достигается наиб. знач.
Вводится понятие:
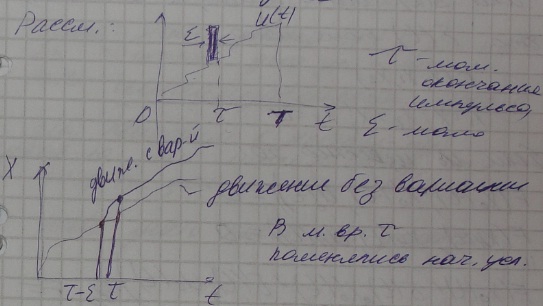
Игольчатая вариация - очень узкий импульс, площадь д.б. конечной, чтобы система могла сдвинуться с места (τ мало).
Необх. решать с-му уравнений…
Движение будет оптимальным, если X0(t) б. принимать приращение одного знака.
В принципе максимума б. наблюдать главн. мин. часть приращения. Для её выделения линеаризуем дифф. ур-е.








