 2017-12-16
2017-12-16 1264
1264(Р -СХЕМЫ)
Рассмотрим особенности построения математических схем при дискретно-стохастическом подходе к формализации процесса функционирования исследуемой системы S. Так как сущность дискретизации времени при этом подходе остается аналогичной рассмотренным в § 2.3 конечным автоматам, то влияние фактора стохастичности проследим также на разновидности таких автоматов, а именно на вероятностных (стохастических) автоматах.
Основные соотношения. В общем виде вероятностный автомат (англ. probabilisticautomat) можно определить как дискретный потактный преобразователь информации с памятью, функционирование которого в каждом такте зависит только от состояния памяти в нем и может быть описано статистически.
Применение схем вероятностных автоматов (P-схем) имеет важное значение для разработки методов проектирования дискретных систем, проявляющих статистически закономерное случайное поведение, для выяснения алгоритмических возможностей таких систем и обоснования границ целесообразности их использования, а также для решения задач синтеза по выбранному критерию дискретных стохастических систем, удовлетворяющих заданным ограничениям.
Введем математическое понятие P-автомата,используя понятия, введенные для F-автомата. Рассмотрим множество G,элементами которого являются всевозможные пары  , где
, где  и
и  — элементы входного подмножества X и подмножества состояний Z соответственно. Если существуют две такие функции φ и ψ,то с их помощью осуществляются отображения G→Z и G→Y,то говорят, что F= <Z, X, Y, φ, ψ> определяет автомат детерминированного типа.
— элементы входного подмножества X и подмножества состояний Z соответственно. Если существуют две такие функции φ и ψ,то с их помощью осуществляются отображения G→Z и G→Y,то говорят, что F= <Z, X, Y, φ, ψ> определяет автомат детерминированного типа.
Введем в рассмотрение более общую математическую схему. Пусть Ф — множество всевозможных пар вида  , где
, где  — элемент выходного подмножества Y. Потребуем, чтобы любой элемент множества G индуцировал на множестве Ф некоторый закон распределения следующего вида:
— элемент выходного подмножества Y. Потребуем, чтобы любой элемент множества G индуцировал на множестве Ф некоторый закон распределения следующего вида:
Элементы из Ф …  ...
...  ... …
... … 

 …
… 
 …
… 

При этом  , где
, где  — вероятности перехода автомата в состояние
— вероятности перехода автомата в состояние  и появления на выходе сигнала ,если он был в состоянии
и появления на выходе сигнала ,если он был в состоянии  , и на его вход в этот момент времени поступил сигнал .Число таких распределений, представленных в виде таблиц, равно числу элементов множества G. Обозначим множество этих таблиц через В. Тогда четверка элементов P = <Z, X, Y, В> называется вероятностным автоматом (P-автоматом).
, и на его вход в этот момент времени поступил сигнал .Число таких распределений, представленных в виде таблиц, равно числу элементов множества G. Обозначим множество этих таблиц через В. Тогда четверка элементов P = <Z, X, Y, В> называется вероятностным автоматом (P-автоматом).
Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y и Z,что можно представить соответственно в виде:
Элементы из Y … 
 …
… 

 …
… 
 …
… 

Элементы из Z …  …
… 

… …
При этом  и
и  , где и
, где и  — вероятности перехода P-автомата в состояние и появления выходного сигнала
— вероятности перехода P-автомата в состояние и появления выходного сигнала  при условии, что P-автомат находился в состоянии и на его вход поступил входной сигнал .
при условии, что P-автомат находился в состоянии и на его вход поступил входной сигнал .
Если для всех  и
и  имеет место соотношение
имеет место соотношение  , то такой P-автомат называется вероятностным автоматом Мили. Это требование означает выполнение условия независимости распределений для нового состояния P-автомата и его выходного сигнала.
, то такой P-автомат называется вероятностным автоматом Мили. Это требование означает выполнение условия независимости распределений для нового состояния P-автомата и его выходного сигнала.
Пусть теперь определение выходного сигнала P-автомата зависит лишь от того состояния, в котором находится автомат в данном такте работы. Другими словами, пусть каждый элемент выходного подмножества Y индуцирует распределение вероятностей выходов, имеющее следующие вид:
Элементы из Y … … 

… 
 …
… 

Здесь  , где
, где  — вероятность появления выходного сигнала
— вероятность появления выходного сигнала  при условии, что P-автомат находился в состоянии .
при условии, что P-автомат находился в состоянии .
Возможные приложения. Если для всех и  имеет место соотношение
имеет место соотношение  ,то такой P-автомат называется вероятностным автоматом Мура. Понятие P-автоматов Мили и Мура введено по аналогии с детерминированным F-автоматом,задаваемым F=<Z, X, Y, φ, ψ>. Частным случаем P-автомата,задаваемого как Р=<Z, X, Y, В>,являются автоматы, у которых либо переход вновое состояние, либо выходной сигнал определяются детерминировано. Если выходной сигнал P-автомата определяется детерминировано, то такой автомат называется Y-детерминированным вероятностным автоматом. Аналогично, Z-детерминированным вероятностным автоматом называется P-автомат, у которого выбор нового состояния является детерминированным.
,то такой P-автомат называется вероятностным автоматом Мура. Понятие P-автоматов Мили и Мура введено по аналогии с детерминированным F-автоматом,задаваемым F=<Z, X, Y, φ, ψ>. Частным случаем P-автомата,задаваемого как Р=<Z, X, Y, В>,являются автоматы, у которых либо переход вновое состояние, либо выходной сигнал определяются детерминировано. Если выходной сигнал P-автомата определяется детерминировано, то такой автомат называется Y-детерминированным вероятностным автоматом. Аналогично, Z-детерминированным вероятностным автоматом называется P-автомат, у которого выбор нового состояния является детерминированным.
Пример 2.4. Рассмотрим Y-детерминированныйP-автомат, который задан таблицей переходов (табл. 2.6) и таблицей выходов:




В этихтаблицах  — вероятность перехода P-автомата из состояния
— вероятность перехода P-автомата из состояния  в состояние
в состояние  . При этом, как и ранее,
. При этом, как и ранее,  .
.
Первую из этих таблиц можно представать в виде квадратной матрицы размерности К x К,которую будем называть матрицей переходных вероятностей или просто матрицей переходов P-автомата. В общем случае такая матрица переходов имеет вид

Таблица 2.6
| | | ||||
| | | … | | | |
| … |   … …  |   … …  | … … … … |   … …  |   … …  |
Для описания Y -детерминированного P-автомата необходимо задать начальное распределение вероятностей вида




Здесь - вероятность, того, что в начале работы P-автомат находится в состояния . При этом  .
.
Будем считать, что до начала работы (до нулевого такта времени) f всегда находится а состоянии z,n нулевой такт времени меняет состояние в соответствии с распределением D. Дальнейшая смена состояний P-автомата определяется матрицей переходов  .Информацию о начальном состояния P-автомата удобно мести в матрицу , увеличив ее размерность до
.Информацию о начальном состояния P-автомата удобно мести в матрицу , увеличив ее размерность до  .При этом первая строка такой матрицы, сопоставляемая состоянию
.При этом первая строка такой матрицы, сопоставляемая состоянию  , будет иметь вид (0, d1, d2,..., …, dk), а первый столбец будет нулевым.
, будет иметь вид (0, d1, d2,..., …, dk), а первый столбец будет нулевым.
Описанный Y -детерминированный P-автомат можно задать в виде ориентированного графа, вершины которого сопоставляются состояниям автомата, а дуги — возможным переходам из одного состояния в другое. Дуги имеют веса, соответствующие вероятностям перехода  ,а около вершин графа пишутся значения выходных сигналов, индуцируемых этими состояниями.
,а около вершин графа пишутся значения выходных сигналов, индуцируемых этими состояниями.
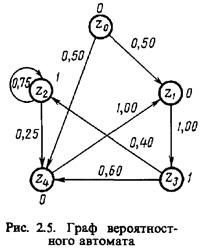
Пример 2.5. Пусть задан Y -детерминированный P-автомат
 | | | |  |  |
 |
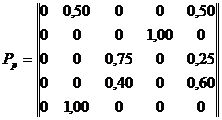
На рис. 2.5 показан граф переходов этого автомата. Требуется оценить суммарные финальные вероятности пребывания этого P-автомата в состояниях и .
При использовании аналитического подхода можно записать известнее соотношения из теории марковских цепей и получить систему уравнений для определения финальных вероятностей. При этом начальное состояние можно не учитывать, так как начальное распределение не оказывает влияния на значения финальных вероятностей. Тогда имеем
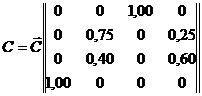


где  — финальная вероятность пребывания P-автомата в состоянии .
— финальная вероятность пребывания P-автомата в состоянии .
Получаем систему уравнений
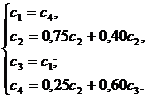
Добавим к этим уравнениям условие нормировки  . Тогда, решая систему уравнений, получим
. Тогда, решая систему уравнений, получим  ,
,  ,
,  ,
,  . Таким образом,
. Таким образом,  . Другим словами, при бесконечной работе заданного в этом примере Y -детерминированного P-автомата на его выходеформируется двоичная последовательность с вероятностью появления единицы равной 0,5652.
. Другим словами, при бесконечной работе заданного в этом примере Y -детерминированного P-автомата на его выходеформируется двоичная последовательность с вероятностью появления единицы равной 0,5652.
Подобные P-автоматы могут использоваться как генераторы марковских последовательностей, которые необходимы при построении и реализации процессов функционирования систем S или воздействий внешней среды Е.
Для оценки различных характеристик исследуемых систем, представляемых в виде P-схем, кроме рассмотренного случая аналитических моделей можно применять и имитационные модели, реализуемые, например, методом статистического моделирования.








