 2014-02-04
2014-02-04 9131
9131Лекция 12
Задержки транспортных средств на нерегулируемых перекрёстках
На нерегулируемых перекрёстках движения по главной дороге обеспечивается без задержек. На второстепенной дороге водитель не обладает преимущественным правом проезда. Он вынужден для дальнейшего движения ожидать приемлемого для него интервала времени между ТС на главной дороге.
Есть приемлемые интервалы, и есть неприемлемые интервалы. В диапазоне минимальных значений приемлемых интервалов находится граничный интервал времени tгр. Он определяется из условия, что он с одинаковой вероятностью может быть принят или отвергнут водителями.
По данным исследований при пересечении 2-х полосной дороги tгр = 6-8 сек, при левом повороте tгр = 10-13 сек, при правом повороте tгр = 4-7 сек.
Задержка авто на второстепенной дороге зависит:
1) От продолжительности ожидания водителем приемлемого интервала
2) От степени изменения авто скорости движения
Учитывая влияние большого числа случайных факторов, потери времени обычно оценивают средней задержкой одного автомобиля.

Где  - среднее время ожидания приемлемого интервала, с.
- среднее время ожидания приемлемого интервала, с.
Средняя задержка авто на данном направлении второстепенной дороги определяется следующей формулой:

 - интенсивность ТП на главной дороге в обоих направлениях (авт/сек)
- интенсивность ТП на главной дороге в обоих направлениях (авт/сек)
 - инт. приходящаяся в среднем на одну полосу второстепенной дороги в рассматриваемом направлении (авт/сек)
- инт. приходящаяся в среднем на одну полосу второстепенной дороги в рассматриваемом направлении (авт/сек)
 ,
,  - замедление и ускорение авто (=3,4 м/с2, =1÷1,% м/с2)
- замедление и ускорение авто (=3,4 м/с2, =1÷1,% м/с2)
Среднюю задержку авто на перекрёстке на перекрёстке в целом определяют как средневзвешенное значение задержек для всех направлений второстепенной дороги.
Задержка на регулируемых перекрёстках.
На регулируемых перекрёстках возникает как на второстепенной так и на главной дорогах, появляется одна в силу запрещающих сигнала светофора величина. Величина задержки зависит от режима работы светофорной сигнализации. Задержка оценивается как в предыдущем случае средней задержкой одного авто в рассматриваемом направлении движения. Для определения задержки используют приближённую формулу:
При выводе этой формулы сделано предположение, что задержка авто, прибывающего к перекрёстку вначале запрещающего сигнала равно длительности этого сигнала; если авто прибывает в момент окончания запрещающего сигнала, то задержка равна нулю.
Приведённая формула справедлива лишь при условии прибытия авто к перекрёстку регулярно, через постоянные интервалы времени. Это характерно для высокой интенсивности движения близкой к пропускной способности. Обычно для изолированного перекрёстка прибытие авто является случайным

 - отношение длительности разрешающего сигнала к циклу
- отношение длительности разрешающего сигнала к циклу


x – степень насыщения направления движения
 ,
,  - поток насыщения в одном направлении движения и интенсивность движения
- поток насыщения в одном направлении движения и интенсивность движения
 - длительность основного такта в том же направлении.
- длительность основного такта в том же направлении.
В целом, для регулирования движения перекрёстка находят средневзвешённую задержку, которая определяется как для нерегулируемого перекрёстка.
Принципы автоматизированного регулирования
режима светофорной сигнализации
При сложной схеме организации движения на перекрёстке расчет режима светофорной сигнализации становится громоздким и трудоёмким. Эта работа ещё больше усложняется если для активного периода суток необходимо составить несколько программ управления. Подобные расчёты необходимо выполнять несколько раз и проводить анализ критерия качества управления.
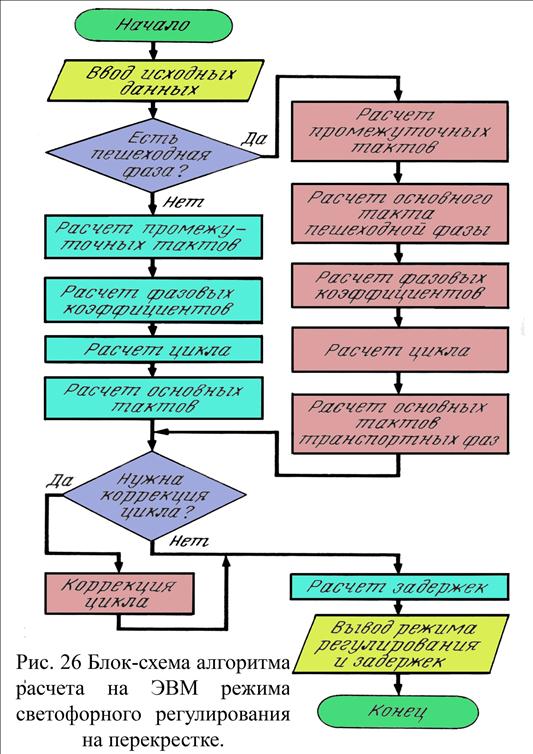
Всю эту работу можно облегчить путём применения ЭВМ, кроме того, используя ЭВМ можно осуществить автоматизированный поиск оптимальных вариантов режима светофорной сигнализации. Покажем блок-схему светофорного регулирования.
Программа расчета предусматривает ввод исходных данных:
– числа фаз регулирования и направлений движения в каждой фазе;
– интенсивность движения и потоки насыщения для каждого направления в каждой фазе;
– длины и скорости автомобилей при проезде перекрестка;
– расстояние от стоп-линии до дальней конфликтной точки;
– ширина проезжей части, пересекаемой пешеходами в каждой фазе.
При наличии трамвайного движения дополнительно необходимы длина трамвая и его скорость движения в пределах перекрестка, а так же путь движения трамвая от стоп-линии до самой дальней конфликтной точки
.
При расчёте на ЭВМ можно вести поиск наилучшей схемы организации движения, критерием при этом служит средневзвешенная задержка, она выводится на печать вместе с режимом регулирования. Критерием неудачного решения может быть появление на экране надписи «затор». Это означает, что степень насыщения рассматриваемого направления (х) больше 1. Ликвидация «заторов» и снижение задержки можно осуществить разными способами:
1) Изменением специализации полос движения на подходах к перекрёстку
2) Запретить движение в отдельном направлении какой-либо из фаз регулирования.
Алгоритм и программа решения задачи по расчету режима светофорной сигнализации были разработаны в МАДИ совместно с МПО «Атоматика».

