2014-02-03
2014-02-03 884
884Рис.67
Рис.66
Рис.65
Дадим системе какое-нибудь возможное перемещение. Все точки ее получат перемещения  ,
,  ,
,  ,…,
,…,  .
.
Затем вычислим работу всех сил на этих перемещениях.
Так как силы, приложенные к каждой точке уравновешиваются и  , то сумма работ этих сил на перемещении
, то сумма работ этих сил на перемещении  будет равна нулю:
будет равна нулю: 
 . Значит и сумма работ всех сил, приложенных ко всем точкам, будет равна нулю
. Значит и сумма работ всех сил, приложенных ко всем точкам, будет равна нулю
 .
.
Если связи идеальные, то вторая сумма всегда равна нулю. Значит,
 (1)
(1)
Этот результат, уравнение работ, называют общим уравнением статики.
При равновесии материальной системы с идеальными и стационарными связями сумма работ всех активных, задаваемых, сил на любом возможном перемещении системы из положения равновесия равна нулю.
Конечно, если у системы есть неидеальные связи, например, с трением, или упругие, вроде пружины, то в уравнение работ надо добавить возможную работу реакций этих связей.
Принцип возможных перемещений можно записать в другой форме.
Если возможные перемещения точек определить с помощью возможных скоростей:  где время
где время  - произвольная бесконечно малая величина, то уравнение работ (1) запишется так
- произвольная бесконечно малая величина, то уравнение работ (1) запишется так  , а, поделив его на получим
, а, поделив его на получим
 , (2)
, (2)
где  – углы между направлениями сил и направлениями векторов возможных скоростей точек приложения сил.
– углы между направлениями сил и направлениями векторов возможных скоростей точек приложения сил.
Равенство (2) можно назвать принципом возможных скоростей, уравнением мощностей. Оно иногда бывает более удобным, так как используются конечные величины скоростей, а не бесконечно малые перемещения.
Этот принцип, общее уравнение статики, позволяет решать задачи на исследование равновесного состояния системы, в частности – находить неизвестные реакции связей. Естественно, при этом возникает вопрос: как же так, ведь реакции идеальных связей не входят в уравнение работ? Выход прост – надо сделать тело свободным, реакции отнести к разряду активных сил и затем назначать такие возможные перемещения, чтобы эти неизвестные силы совершали работу.
Общее уравнение статики – довольно эффективный метод и применять его, конечно, надо для исследования равновесия сложных систем; хотя и при решении обычных задач статики он оказывается тоже выгодным.
Пример 20. Какую силу F надо приложить к желобу с грузом весом Р, чтобы удержать его в равновесии (рис.66)?
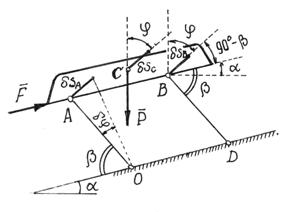
Эту задачу можно решить известными методами статики, составляя уравнения равновесия. Но при этом придется прежде отыскать усилия в стержнях. Принцип возможных перемещений позволяет найти силу F проще, с помощью общего уравнения статики.
Показываем активные силы  и
и  . Даем системе возможное перемещение, повернув стержень АО на угол
. Даем системе возможное перемещение, повернув стержень АО на угол  (рис.66). Так как желоб совершит поступательное движение, то перемещения всех его точек будут одинаковы:
(рис.66). Так как желоб совершит поступательное движение, то перемещения всех его точек будут одинаковы:

где  .
.
Составляем уравнение работ:  . Угол
. Угол  .
.
Поэтому получим  Отсюда
Отсюда  .
.
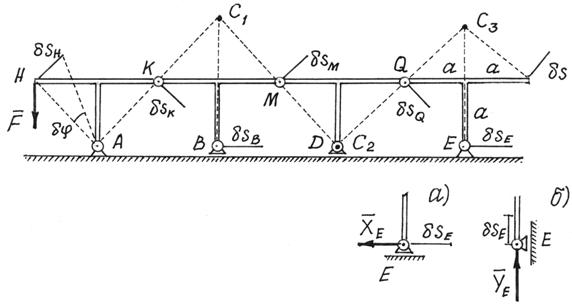
Пример 21. На рис.67 изображена конструкция, состоящая из четырех одинаковых Т-образных рам, соединенных шарнирами К, М, Q. Опоры А и Е – шарнирно-неподвижные, В и D – шарнирно-подвижные. Определим горизонтальную составляющую  реакции опоры Е, вызванную силой , приложенной к левой раме.
реакции опоры Е, вызванную силой , приложенной к левой раме.
Методы статики дадут довольно сложное и длинное решение, так как придется рассматривать равновесие четырех рам и решать систему из 12 уравнений с 12-ю неизвестными.
Принцип возможных перемещений дает более простое и короткое решение.
Надо изменить конструкцию опоры Е. Сделаем ее подвижной, а чтобы система осталась в равновесии, приложим к опоре силу , ту силу, которую нужно определить (рис.67, а).
Даем затем системе возможное перемещение, повернув левую раму вокруг опоры А на угол . С помощью мгновенных центров скоростей С1, С2 и С3 каждой рамы, обнаруживаем, что  а
а  или
или  Составляем уравнение работ, общее уравнение статики,
Составляем уравнение работ, общее уравнение статики,  или
или  . Отсюда
. Отсюда  .
.
Чтобы определить вертикальную составляющую  реакции опоры Е, ее надо вновь переделать (рис. 67, б), дать системе соответствующее возможное перемещение и составить уравнение работ.
реакции опоры Е, ее надо вновь переделать (рис. 67, б), дать системе соответствующее возможное перемещение и составить уравнение работ.
По принципу Даламбера материальную систему, движущуюся под действием некоторых сил, можно рассматривать находящейся в равновесии, если ко всем точкам системы приложить их силы инерции. Значит можно воспользоваться и принципом возможных перемещений.
В уравнение работ (1) добавится еще сумма работ сил инерции точек на их возможных перемещениях:
 (3)
(3)
Или по принципу возможных скоростей (2):
 (4)
(4)
Эти уравнения называют общим уравнением динамики. Оно позволяет решать большой класс задач на исследование движения довольно сложных материальных систем.
Уравнения (3) и (4) показывают, что в любой фиксированный момент времени сумма элементарных работ активных сил и сил инерции на любых виртуальных перемещениях равна нулю при условии, что на систему наложены идеальные и удерживающие связи.
Силы инерции точек и твердых тел, составляющих систему, определять уже умеем.
Стоит подчеркнуть еще одно важное достоинство этого метода, общего уравнения динамики, – реакции связей (идеальных) исключаются при исследовании движения системы.
Иногда это уравнение можно использовать для исследования движения механических систем и в тех случаях, когда не все связи являются идеальными, например, когда имеются связи с трением. Для этого следует к активным силам добавить те составляющие реакций, которые обусловлены наличием сил трения.
Рассмотрим процедуру использования уравнения (3) для составления дифференциальных уравнений движения систем с двумя степенями свободы:
1. Изобразить механическую систему в произвольный момент времени.
2. Показать на рисунке активные силы и моменты, а также силы и моменты, соответствующие неидеальным связям (например, силы трения).
3. Определить главные векторы и главные моменты сил инерции.
4. Выбрать обобщенные координаты в числе, равном числу степеней свободы системы.
5. Дать виртуальное перемещение, соответствующее одной из степеней свободы системы, считая при этом виртуальные перемещения, соответствующие остальным степеням свободы, равными нулю.
6. Вычислить сумму элементарных работ всех сил и моментов (см. п. 2 и 3) на соответствующих виртуальных перемещениях и приравнять эту сумму нулю.
7. Повторить п. 4 - 6 для каждого независимого движения системы.
При применении общего уравнения динамики к системам с двумя и большим числом степеней свободы, в связи с громоздкостью выкладок, можно использовать следующие рекомендации:
1. Сделать предположение о направлении ускорений точек системы.
2. Направить на рисунке силы инерции в стороны, противоположные выбранным направлениям соответствующих ускорений.
3. Определить знаки элементарных работ сил инерции в соответствии с их направлениями на рисунке и избранными направлениями виртуальных перемещений точек системы.
4. Если искомые ускорения оказываются положительными, то сделанные предположения о направлениях ускорений подтверждаются, если отрицательными, то соответствующие ускорения направлены в другую сторону.
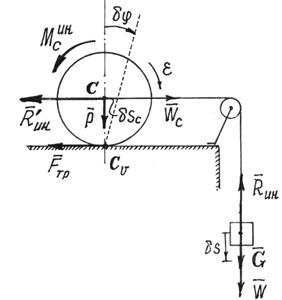
Пример 22. Определим ускорение груза G (рис.68). Вес цилиндра – Р, радиус – r. Цилиндр катится по плоскости без скольжения.