 2014-02-09
2014-02-09 1188
1188Простой механизм, состоящий из одного подвижного звена, образующего с неподвижным звеном низшую кинематическую пару, называется механизмом I класса ( рис. 9.4 ).

Рис. 9.4
Группой Ассура называется плоская кинематическая цепь, присоединение которой к другой кинематической цепи не изменяет числа степеней свободы последней, т. е. группа Ассура имеет нулевую степень свободы.
Степень подвижности W плоских механизмов определяется по формуле Чебышева W = 3 n – 2 P 5 – P 4,
где: n – число подвижных звеньев;
Р 5, Р 4 – число кинематических пар 4, 5 классов;
1, 2, 3 – число исключаемых степеней свободы.
Класс группы Ассура определяется числом внутренних кинематических пар, образующих наиболее сложный замкнутый профиль.
Порядок группы Ассура определяется числом внешних кинематических пар, которыми она может быть присоединена к другой кинематической цепи.
Классификация механизмов по группам Ассура возможна, если выполняются следующие три требования:
– число ведущих звеньев равняется числу степеней свободы механизма;
– ведущее звено образует кинематическую пару с неподвижным звеном;
– все кинематические пары относятся к пятому классу.
Звено, находящееся в пространстве и не связанное с другими звеньями, имеет шесть степеней свободы: три поступательные движения вдоль осей oX, oY, oZ и три вращательные движения вокруг этих осей.
Кинематическая пара накладывает ограничения, т.е. связи, на относительное движение звеньев, связанных этой кинематической парой.
Обозначим S - число связей, накладываемых кинематической парой.
При S=6 звенья теряют относительную подвижность в пространстве, а при S=0 исчезает кинематическая пара. Следовательно, для пространственной системы 1 ≤ S≤5.
Таблица 9.1
| Пространственная система | Плоская система | |
| Число связей кинематической пары S | 5 4 3 2 1 | 2 1 |
| Класс кинематической пары | V IV III II I | II I |
| Число степеней свободы звена Н | Н=6-S 1 2 3 4 5 | Н=3-S 1 2 |
| Подвижность кинематической пары | одно- 2-х 5-ти подв. подв. подв. ……….. | одно- 2-х подв. подв. |
На плоскости свободное звено имеет три степени свободы: два поступательных движения вдоль осей oX, oY и одно вращательное движение вокруг оси, перпендикулярной плоскости XoY. В этом случае число связей, накладываемых кинематической парой на относительное движение связанных звеньев может быть 1 ≤ S≤2.
Кинематические пары делятся на классы, которые соответствуют числу накладываемых связей (табл.9.1).
Число степеней свободы звена кинематической пары равно разности числа степеней свободы звена, не связанного кинематическими парами, и количества наложенных связей.
Подвижность кинематической пары равна числу степеней свободы звена, связанного этой кинематической парой.
Структурными формами называются закономерности, связывающие число степеней свободы Н кинематической цепи механизма с числом звеньев и числом и видом его кинематических пар.
Для определения числа степеней свободы пространственного механизма применяется структурная формула Сомова-Малышева:
W = 6n-5p5-4p4-3p3-2p2-p1 ,
где W – число степеней подвижности;
n – число подвижных звеньев;
p5 – число кинематических пар 5 класса;
p4 - число кинематических пар 4 класса;
p3 - число кинематических пар 3 класса;
p2 - число кинематических пар 2 класса;
p1 - число кинематических пар 1 класса.
Эта формула служит для определения степени подвижности пространственной кинематической цени. Пример: карточка.
Кулачковым механизмом называется механизм, в состав которго входит кулачок (звено, рабочая поверхность которого имеет переменную кривизну) (рис.9.5).
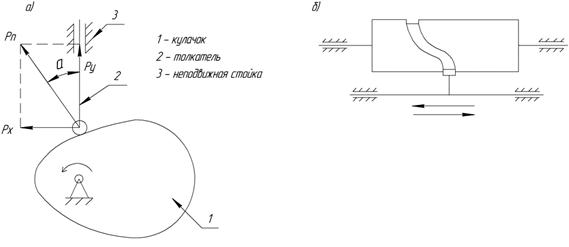
Рис. 9.5








