 2015-01-30
2015-01-30 1374
1374Допущения:
- лопатку рассматриваем как закрученный стержень переменного сечения;
- отсутствует связь изгибных и крутильных колебаний;
- ось лопатки проходит через центры тяжести всех сечений и нерастяжима;
- при колебаниях все сечения остаются плоскими и перпендикулярными упругой линии (гипотеза Кирхгофа – Лява).
Примем систему координат OXYZ, начало которой O расположено в центре тяжести корневого сечения, оси X и Y совпадают с главными центральными осями инерции корневого сечения (пусть  ), ось Z направлена по оси лопатки. Оси вспомогательной системы координат
), ось Z направлена по оси лопатки. Оси вспомогательной системы координат  параллельны осям главной системы координат, начало
параллельны осям главной системы координат, начало  находится в центре тяжести текущего сечения. Выделим в лопатке бесконечно малый элемент высотой dz (рис. 14.1).
находится в центре тяжести текущего сечения. Выделим в лопатке бесконечно малый элемент высотой dz (рис. 14.1).
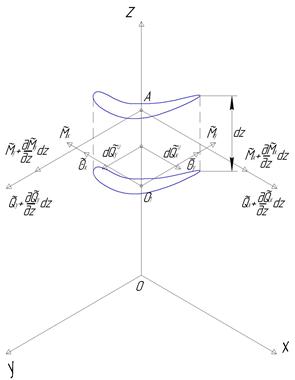
Рис.14.1. Бесконечно малый элемент лопатки
и динамические силы, приложенные к нему при изгибных колебаниях
Рассмотрим условия равновесия элемента с учетом сил инерции
 и
и
 ,
,
где  и
и  - упругие смещения в направлении осей X и Y. Знак волны над переменной означает то, что она зависит от времени.
- упругие смещения в направлении осей X и Y. Знак волны над переменной означает то, что она зависит от времени.
В направлении оси 
 , откуда
, откуда
 (14.1)
(14.1)
Из условия равновесия в направлении оси  аналогично получаем
аналогично получаем
 (14.2)
(14.2)
Вокруг оси :
 .
.
Приводя подобные и пренебрегая бесконечно малыми второго порядка, получаем
 . (14.3)
. (14.3)
Вокруг оси :
 .
.
Приводя подобные и пренебрегая бесконечно малыми второго порядка, получаем
 . (14.4)
. (14.4)
Установим связь моментов и углов поворота сечений. В плоскости OXZ (рис. 14.2)
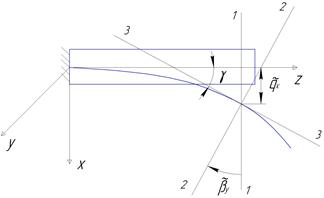
Рис.14.2. Изгиб оси лопатки в плоскости OXZ
1 – положение сечения в равновесном состоянии; 2 - положение изогнутой оси лопатки;
3 - касательная к изогнутой оси лопатки в месте расположения сечения.
Из рис. 14.2 видно, что

С учетом знаков момента и угла поворота
 (14.5)
(14.5)

Рис.14.3. Изгиб оси лопатки в плоскости OYZ
1 – положение сечения в равновесном состоянии; 2 - положение изогнутой оси лопатки;
3 - касательная к изогнутой оси лопатки в месте расположения сечения.
В другой плоскости из рис. 14.3 видно
 (14.6).
(14.6).
Сечение лопатки поворачивается вокруг осей X и Y. Из рис. 14.4 видно, что (с учетом знаков углов поворота) перемещение произвольной точки сечения  в направлении оси Z вследствие поворота сечения вокруг оси X составляет
в направлении оси Z вследствие поворота сечения вокруг оси X составляет
 ,
,
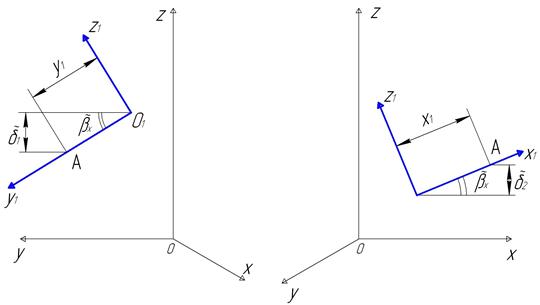
Рис.14.4. Поворот сечения лопатки в плоскостях OXZ и OYZ
вследствие поворота сечения вокруг оси Y составляет
 .
.
Есть также перемещение  в направлении оси Z сечения в целом, связанное с перемещением его центра, точки О1. Полное перемещение точки в направлении оси Z
в направлении оси Z сечения в целом, связанное с перемещением его центра, точки О1. Полное перемещение точки в направлении оси Z
 .
.
Согласно формулам Коши
 .
.
Тогда напряжение в окрестности точки
 .
.
Это напряжение создает бесконечно малые моменты вокруг осей (рис. 14.5)
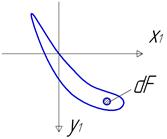
Рис. 14.5. Определение знаков моментов сил от напряжения на бесконечно малой площади dF
 ,
,
 .
.
Полный момент
В первое слагаемое входит статический момент вокруг оси . Поскольку – главная ось инерции, этот момент равен нулю. Во второе слагаемое входит момент инерции относительно оси , в третье – центробежный момент инерции. Таким образом,
Аналогично:
Поскольку деформации лопатки при колебаниях малы, будем считать, что оси главной и вспомогательной систем координат приблизительно параллельны. Тогда
 ;
;  , моменты инерции тоже приблизительно одинаковы.
, моменты инерции тоже приблизительно одинаковы.
Запишем два последних уравнения в матричной форме.
 .
.
Обозначив матрицу как [A], получим
 .
.
Пусть матрица  имеет вид
имеет вид  . Тогда
. Тогда
 (14.7)
(14.7)
 (14.8)
(14.8)
Уравнения (14.1)…(14.8) образуют систему дифференциальных уравнений, описывающих изгибные колебания лопатки:



Параметры в первых четырех уравнениях, а именно: qx; βy; My; Qx имеют отношение к плоскости OXZ, поэтому первые четыре уравнения описывают колебания в плоскости OXZ, а последние четыре – определяют колебания в плоскости OYZ. Связь между колебаниями в этих плоскостях осуществляется через коэффициент axy при Mx и My. Если лопатка не слишком закрученная, то оси и приблизительно совпадают с главными осями инерции во всех сечениях, в таком случае центробежные моменты инерции близки к нулю, коэффициент axy = 0 и связь между колебаниями в плоскостях OXZ и OYZ отсутствует. В этом случае
 ;
;  .
.
Рассмотрим колебания в плоскости OXZ, т. е. только первые четыре уравнения. Их решение будем искать в гармоническом виде (где p – собственная частота колебаний):



После подстановки в дифференциальные уравнения получаем:

Из первого уравнения  . Подставим это во второе уравнение, получим
. Подставим это во второе уравнение, получим  . Подставив в третье уравнение, получим
. Подставив в третье уравнение, получим  . Подставив в четвертое уравнение, получим
. Подставив в четвертое уравнение, получим  . Окончательно получили дифференциальное уравнение четвертого порядка
. Окончательно получили дифференциальное уравнение четвертого порядка
 .
.
Обозначим
 . Тогда
. Тогда
 ,
,
 .
.
Решение уравнения четвертого порядка - сумма четырех линейно независимых частных решений.

Частными решениями уравнения являются  ,
,  , а также гиперболические косинус и синус
, а также гиперболические косинус и синус
В решение будем подставлять их суммы, которые называются функциями Крылова.
 ,
,
 ,
,
 ,
,
 .
.
Преимущество этих функций состоит в том, что при дифференцировании они переходят друг в друга: dS/dz = V; dT/dz = S; dU/dz = T; dV/dz = U.
При этом S(0)=1; T(0) = U(0) = V(0) = 0.
Подставим решение вида  в полученные уравнения.
в полученные уравнения.
 ,
,
 ,
,
 .
.
Неизвестные постоянные С1, С2, С3, С4 определяются из граничных условий.

