 2015-02-14
2015-02-14 1377
1377Метод конечных элементов предусматривает задание форм перемещений не по всей длине стержня, а лишь на отдельных участках длины h (Рис. 3.1), на которые разбивается стержневая система:
Рис. 3.1. Выделение элемента длины h.
В пределах каждого участка для случая для случая изгиба стержня формы перемещений задаются кубическим полиномом:
 (3.1)
(3.1)
Рис. 3.2. Нумерация перемещений в пределах элемента
Учитывая, что:



Если выразить  через прогибы и углы поворота на краях рассматриваемого элемента, то получим:
через прогибы и углы поворота на краях рассматриваемого элемента, то получим:




Подставляя  в выражение (3.1) имеем
в выражение (3.1) имеем

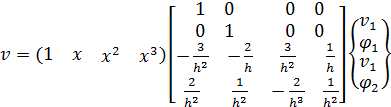
Вынесем обобщенные координаты за скобки как общие множители и сформируем произведение матриц
 , (3.2)
, (3.2)
В компактной форме

где q – вектор-столбец обобщенных перемещений, которыми являются перемещения узловых точек на границе элементов по ортогональным направлениям

- одномерные функции Эрмита:
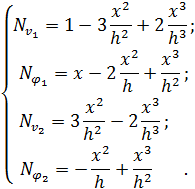
Функции Эрмита удовлетворяют следующим условиям:

 ;
;  ;
;  ;
;

 ;
;  ;
;  ;
;

 ;
;  ;
;  ;
;

 ;
;  ;
;  ;
;
Каждая из функций Эрмита определяет изгиб жестко заделанной балки, которая получила единичное смещение по соответствующему направлению. Эти единичные смещения показаны на рисунке 3.3.
Выражения (3.2) можно представить в виде
 ;
;
Обозначим
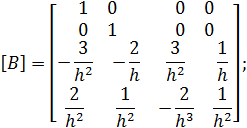
Тогда
 (3.3)
(3.3)
Рис. 3.3. Единичные смещения по обобщенным перемещениям
Равновесие элемента в обобщенных координатах имеет вид

где
 - обобщенные силы от внутренних сил упругости элемента,
- обобщенные силы от внутренних сил упругости элемента,
 - обобщенные силы от внешних активных сил.
- обобщенные силы от внешних активных сил.
Чтобы получить обобщенные силы от внутренних сил упругости и матрицу жесткости для балочного элемента, запишем выражение потенциальной энергии внутренних сил элемента:
 ; (3.4)
; (3.4)
где
 (3.5)
(3.5)
E- модуль упругости материала балки, I- момент инерции сечения элемента.

Обобщенные силы от внутренних сил упругости выражаются через потенциальную энергию

Обозначим как матрицу жесткости элемента
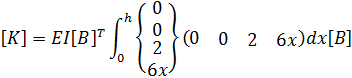
После вычисления интеграла и подстановки матрицы  получим
получим

После перемножения матриц имеем:
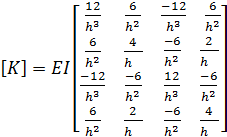 (3.6)
(3.6)
Обобщенные силы от внутренних сил упругости примут вид
 (3.7)
(3.7)
где  – вектор-столбец обобщенных перемещений.
– вектор-столбец обобщенных перемещений.
Обобщенные силы от внешних активных воздействий на элемент определим через возможную работу на обобщенных перемещениях
 (3.8)
(3.8)
где в соответствии с (3.3) вариация поперечного перемещения
 ,
,
а проекция распределенной нагрузки на поперечное направление к оси элемента при линейном законе распределения выражается через ее узловые значения  :
:
 , (3.9)
, (3.9)
при
 ,
,
 .
.
 (3.10)
(3.10)
где
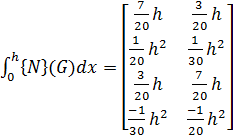 ,
,
Рис. 3.4. Интенсивность воздействия распределенных сил на рамный (балочный) конечный элемент
Тогда
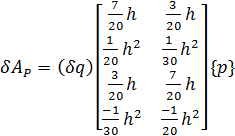 . (3.11)
. (3.11)
Коэффициенты в выражении возможной работы при соответствующих вариациях обобщенных координат  называются обобщенными силами, то есть
называются обобщенными силами, то есть
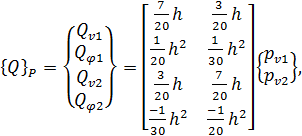 (3.12)
(3.12)
где  - значения распределенной нагрузки в узловых точках.
- значения распределенной нагрузки в узловых точках.
В выражение (3.12) необходимо добавить сосредоточенные узловые активные силы, в проекции на направление обобщенных перемещений.
Вернемся к условию равновесия в обобщенных координатах, представив его в виде
 ,
,
Тогда для конечного элемента оно выглядит так:
 (3.13)
(3.13)
При решении динамической задачи уравнения составляем на основе уравнений Лагранжа второго рода:
 (3.14)
(3.14)
где T – кинетическая энергия механической системы, которую необходимо выразить через обобщенные координаты:
 ,
,
где m – масса единицы длины стержневого элемента.
Выразим скорости точек элемента через обобщенные координаты и функции Эрмита, получим:
 (3.15)
(3.15)
Под интегралом в выражении (3.15) стоит квадратная матрица:
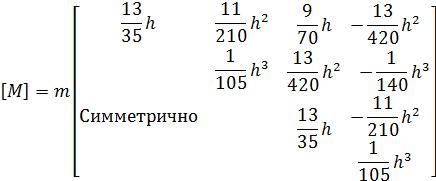
После вычисления интеграла получаем выражение кинетической энергии через произведение обобщенных скоростей и матрицы масс [ M ] размером 4  4.
4.
 , (3.16)
, (3.16)
где 
Вычисляя производные в левой части уравнений Лагранжа второго рода (3.14), получим:

и с учетом соотношения (3.7) запишем
 (3.17)
(3.17)
Уравнение (3.17) определяет модель движения упругой динамической системы под действием внешних переменных сил.

