2015-04-12
2015-04-12 2909
2909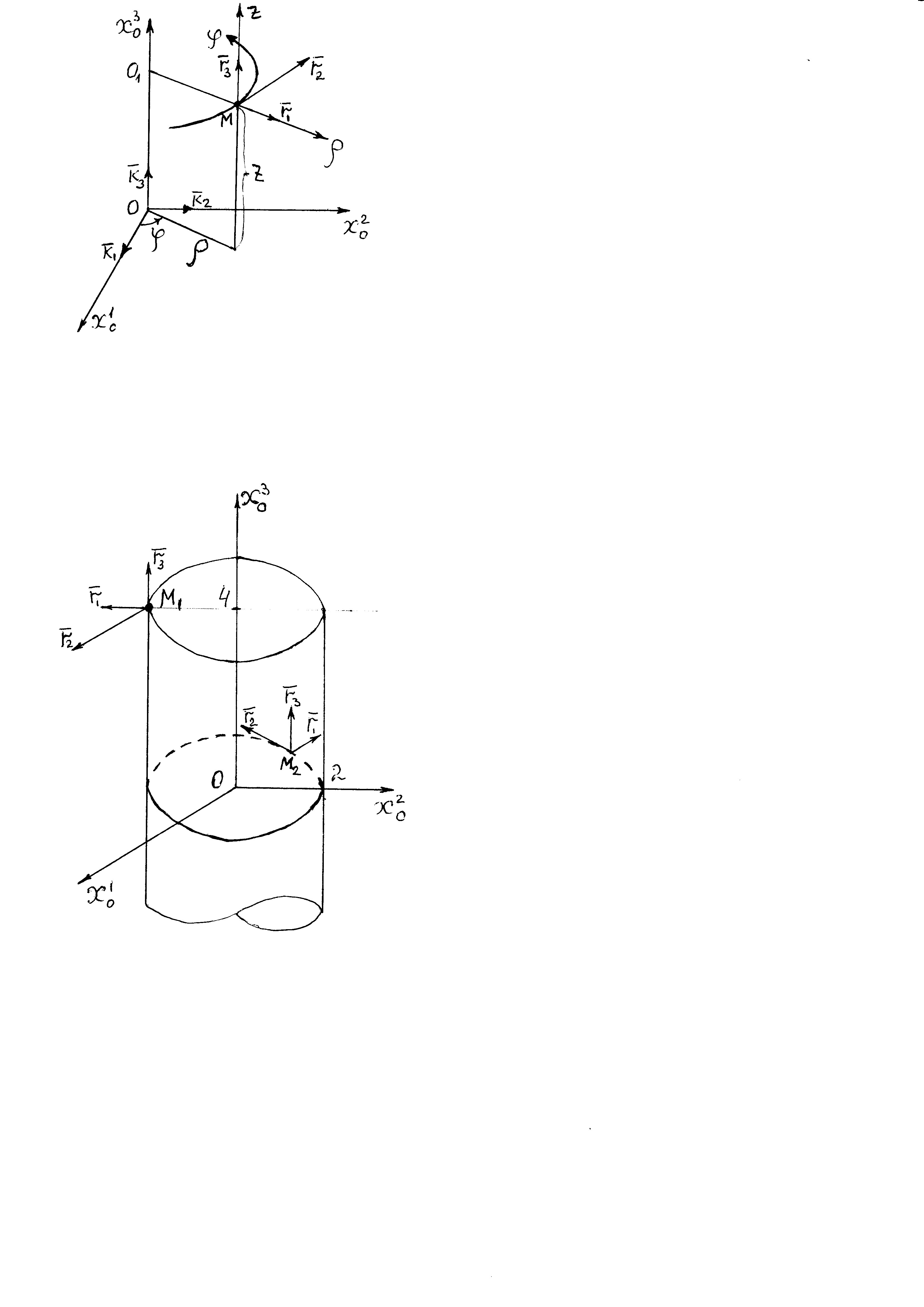 1) Введем цилиндрические координаты:
1) Введем цилиндрические координаты:

2) Определим векторы локального базиса в точке  :
:

Рис. 3. 


3) Построим локальный базис в точке М (Рис. 3), для этого проведем через эту точку координатные линии цилиндрической системы координат. Вдоль координатной линии изменяется только одна координата. Поэтому фиксируем две координаты и проводим координатную линию третьей координаты. В точке М строим векторы локального базиса, которые являются касательными векторами к координатным линиям. Базисные векторы направлены в сторону возрастания соответствующей координаты. Длины векторов локального базиса, определяются их модулями.
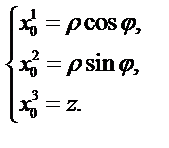
Построим локальные базисы в точках М1(2; 3π/2; 4), М2(2; π; 0), рис. 4.
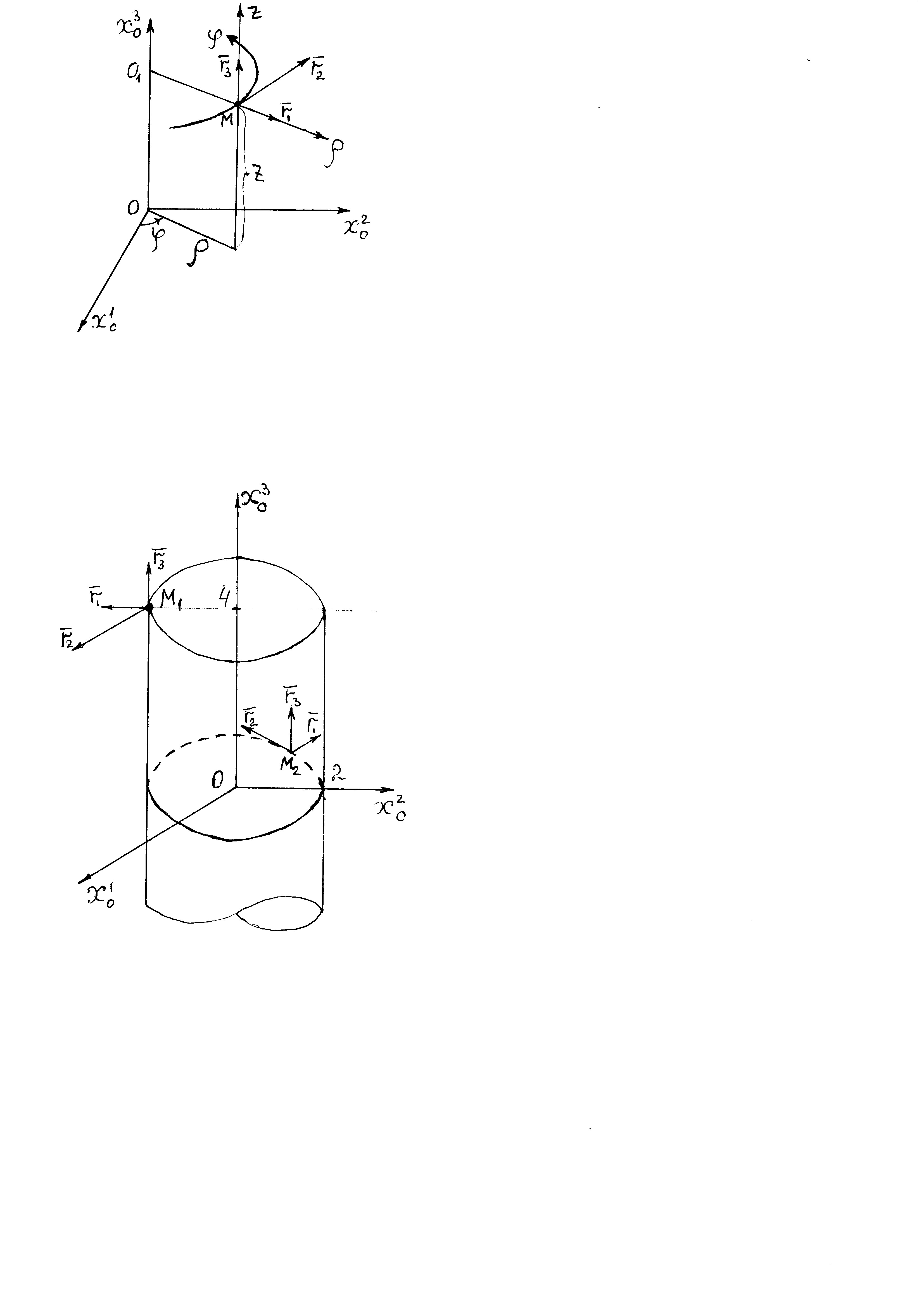
Рис. 4
III. Сферическая система координат
1) Введем сферические координаты:
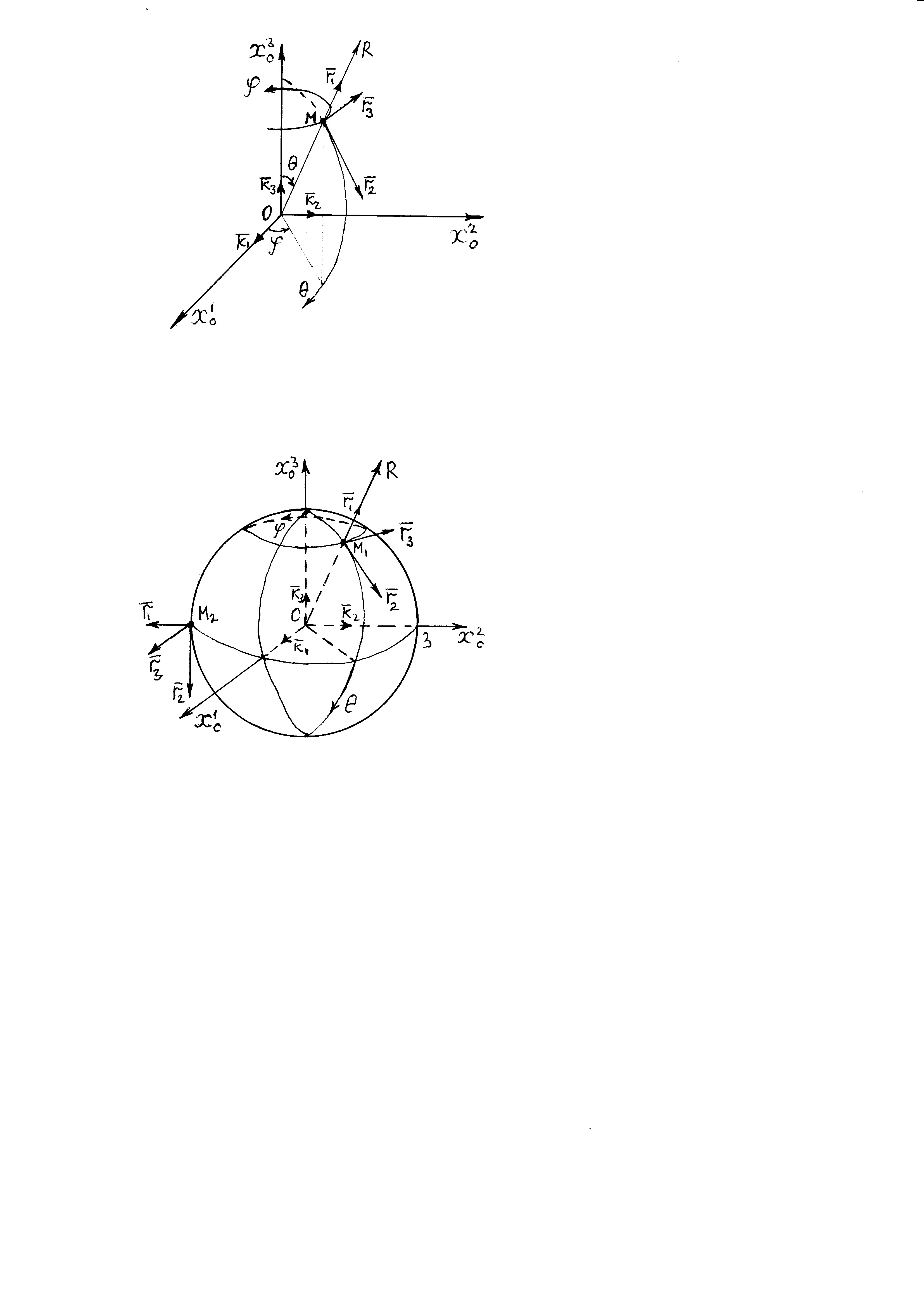

Рис. 5
2) Определим векторы локального базиса в точке 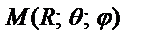 :
:






т.к. 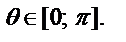
3) Построим локальный базис в точке М, для этого проведем через эту точку координатные линии сферической системы координат. Вдоль координатной линии изменяется только одна координата. Поэтому фиксируем две координаты и проводим координатную линию третьей координаты. В точке М строим векторы локального базиса, которые являются касательными векторами к координатным линиям. Базисные векторы направлены в сторону возрастания соответствующей координаты. Длины векторов локального базиса, определяются их модулями.
Построим локальные базисы в точках М1(3; π/6; π/4), М2(3; π/2; 3π/2).
Рис. 6.
Рис. 7
IV. Тороидальная система координат.
Эту систему координат изучите самостоятельно.
Тема III: Взаимный базис, ковариантные и контравариантные
компоненты вектора.
Основные формулы:
 – определение взаимного базиса r i
– определение взаимного базиса r i
 – фундаментальная матрица.
– фундаментальная матрица.