 2015-04-17
2015-04-17 2265
2265Аналитические исследования работы систем (моделирование) проводятся в основном при типовых входных воздействиях. Такое ограничение влечет за собой возможность получать и использовать стандартизованные таблицы, формулы и интерпретации полученных результатов.
Суждение о качестве работы систем основывается на рассмотрении переходной функции системы (реакции на единичное ступенчатое воздействие).
В реальном случае, когда рассматривается, например, автоматический перевод по заданию оператора скорости вращения двигателя с одного числа оборотов на другое, величина ступенчатого воздействия вполне конкретна. Например, требуется изменить число оборотов с 2000 об/мин на 2500 об/мин. В этом случае величина ступенчатого воздействия равна 500 об/мин, т.е. математически задающее воздействие запишется в виде 500 1(t).
Однако на оценки качества, представленные далее, это не повлияет. В силу гомогенности линейных уравнений системы оценки буду такими же как и на 1(t).
Вид переходного процесса может быть плавным, колебательным, с различным характером колебаний, различный по длительности протекания.
Для того, чтобы описать основные черты переходных процессов используются обобщенные оценки, характеризующие различные качества.
Начинать оценку показателей следует с проведения зоны допустимых значений регулируемой величины в установившемся (рабочем режиме). На рис.22.1 она показана пунктиром. Ее величина  берется равной 2÷5 % (чаще 5 %) от установившегося значения регулируемой величины y∞. Именно с этой величиной, взятой за точку отсчета, связаны стандарты обобщенных графиков и таблиц, используемых в дальнейшем при расчетах систем.
берется равной 2÷5 % (чаще 5 %) от установившегося значения регулируемой величины y∞. Именно с этой величиной, взятой за точку отсчета, связаны стандарты обобщенных графиков и таблиц, используемых в дальнейшем при расчетах систем.
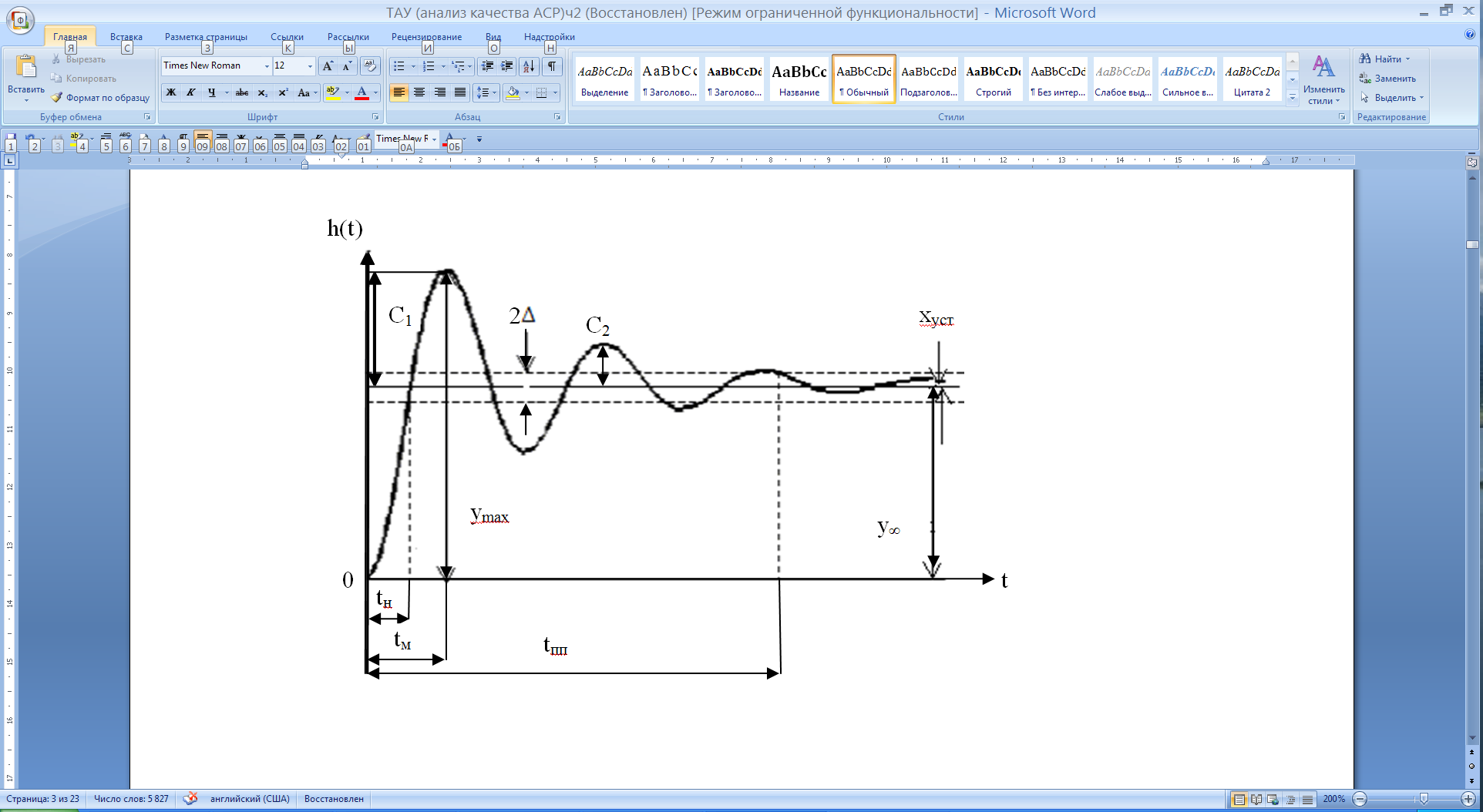
Рис.22.1. Переходный процесс системы на единичное ступенчатое воздействие
При необходимости рассмотрения конкретного случая данная величина берется равной допустимой ошибке регулирования, а процесс рассматривается при конкретных значениях регулируемой величины.
В случае с упомянутым двигателем показатели качества системы, приводимые далее, можно рассматривать, например, при допустимой величине ошибки ± 10 об/мин и величине ступенчатого сигнала 500 об/мин.
Ошибка регулирования - основной показатель того, выполняет система задачу требуемым образом или нет.
Величина, характер и длительность устранения происходящих изменений ошибки регулирования - основной предмет рассмотрения при оценке качества работы систем.
Величина ошибки системы в установившемся (рабочем) режиме xуст отвечает за качество, названное точностью работы системы.
Математически она определяется следующим образом
xуст = x(∞)=  (22.1)
(22.1)
Скорость решения задач автоматического перевода системы (регулируемой величины) из одного состояния в другое, названа быстродействием и оценивается:
- временем переходного процесса tпп;
- временем нарастания tн и
- временем первого максимума tм.
Время переходного процесса определяется как время, пока регулируемая величина не вошла в зону допустимых значений регулируемой величины.
Характер переходного процесса связан с качеством, названным запасом устойчивости. Чем более колебательным будет переходный процесс, тем ближе система будет к границе, за которой наступает ее неустойчивость, проявляющаяся в неограниченном увеличении ошибки регулирования. В этом случае систему признают неработоспособной.
Запас устойчивости характеризуется:
перерегулированием σ,
затуханием за период ψ,
числом колебаний Ν.
Перерегулирование и затухание выражаются в процентах и вычисляются по следующим формулам:
 (22. 2)
(22. 2)
 (22. 3)
(22. 3)
Число колебаний N определяется как число максимумов и минимумов h(t) за время переходного процесса  . На рис.22.1.1 N = 5.
. На рис.22.1.1 N = 5.
Из практики работы систем известно, что для устойчивых нормально работающих систем  , а
, а  %. Чем больше σ, N и меньше ψ, тем более склонна система к колебаниям, тем меньше ее запас устойчивости.
%. Чем больше σ, N и меньше ψ, тем более склонна система к колебаниям, тем меньше ее запас устойчивости.
Как следует из формул (22.2) и (22.3), перерегулирование характеризует максимальное отклонение, возникающее в переходном процессе, а ψ как и N – колебательность процесса.
Малая величина ψ и большое число N сопутствуют обычно частым переключениям исполнительного механизма. Отсюда задание их требуемых значений основывается в ряде случаев на соображениях надежности работы АСР: чем реже переключения исполнительного механизма, тем меньше его износ и старение, тем меньше износ регулирующего органа. У исполнительного механизма электрического типа возможно ограничение на число его включений в час, так как известно, что наибольший нагрев электродвигателей происходит в пусковых режимах из-за больших токов, а более частое включение может привести к их перегреву и выходу из строя.
Требования к времени нарастания  и к величине σ могут быть связаны, например, для механических систем, с допустимыми ускорениями регулируемой величины, иначе говоря, с допустимыми механическими перегрузками их элементов, а также с предельно возможной скоростью перемещения исполнительным механизмом регулирующего органа.
и к величине σ могут быть связаны, например, для механических систем, с допустимыми ускорениями регулируемой величины, иначе говоря, с допустимыми механическими перегрузками их элементов, а также с предельно возможной скоростью перемещения исполнительным механизмом регулирующего органа.

