 2015-05-06
2015-05-06 1552
1552Учение о колебаниях составляет основу ряда областей физики и техники. Хотя колебания, рассматриваемые в различных областях, например в механике, радиотехнике, акустике и др., отличаются друг от друга по своей физической природе, основные законы этих колебаний во всех случаях остаются одними и теми же. Поэтому изучение механических колебаний является важным не только по той причине, что такие колебания очень часто имеют место в технике, но и вследствие того, что результаты, полученные при изучении механических колебаний, могут быть использованы для изучения и уяснения колебательных явлений в других областях.
Начнем с изучения свободных колебаний точки без учета сил сопротивления. Рассмотрим точку М, движущуюся прямолинейно под действием одной только восстанавливающей силы  , направленной к неподвижному центру. О и пропорциональной расстоянию от этого центра. Проекция силы на ось Ох (рис.14) будет равна
, направленной к неподвижному центру. О и пропорциональной расстоянию от этого центра. Проекция силы на ось Ох (рис.14) будет равна
Fx=-cx.
 Сила
Сила  , как видим, стремится вернуть точку в равновесное положение О, где F=0; отсюда и наименование «восстанавливающая» сила. Примером такой силы является сила упругости.
, как видим, стремится вернуть точку в равновесное положение О, где F=0; отсюда и наименование «восстанавливающая» сила. Примером такой силы является сила упругости.
Рис.14
Найдем закон движения точки М. Составляя дифференциальное уравнение движения получим
 .
.
Деля обе части равенства на т и вводя обозначение
 ,
,
приведем уравнение к виду
 .
.
Уравнение представляет собою дифференциальное уравнение свободных колебаний при отсутствии сопротивления. Решение этого линейного однородного дифференциального уравнения второго порядка ищут в виде x=ent. Полагая x=ent, получим для определения п так называемое характеристическое уравнение, имеющее в данном случае вид п2 + k2 = 0. Поскольку корни этого характеристического уравнения являются чисто мнимыми (n1,2= ±ik), то, как известно из теории дифференциальных уравнений, общее решение имеет вид
х = C1Sinkt + C2Coskt,
где C1 и С2-постоянные интегрирования. Если вместо постоянных C1 и С2 ввести постоянные а и α, такие, что C1=a Cosα, С2=а Sinα, то мы получим x=a(sinkt cosα 4+ cos kt sinα) или x=aSin(kt+α).
Это другой вид решения в котором постоянными интегрирования являются а и α. Им удобнее пользоваться для общих исследований.
Скорость точки в рассматриваемом движении равна
 .
.
Колебания, совершаемые точкой по закону  называются гармоническими колебаниями.
называются гармоническими колебаниями.
Всем характеристикам этого движения можно дать наглядную кинематическую интерпретацию. Рассмотрим точку В, движущуюся равномерно по окружности радиуса а из положения В0 определяемого углом DOВ0 = α (рис.15).
Пусть постоянная угловая скорость вращения радиуса ОВ равна k. Тогда в произвольный момент времени t угол φ = < DOB =α + kt и проекция М точки В на диаметр, перпендикулярный к DE, движется по закону х= а Sin (kt+α), где х=ОМ, т. е. совершает гармонические колебания.
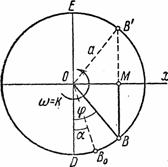
Рис.15
Величина а, равная наибольшему отклонению точки М от центра колебаний, называется амплитудой колебаний. Величина φ= α + kt называется фазой колебаний.
Величина k, совпадающая с угловой скоростью вращения радиуса ОВ, показанного на рис.15 называется круговой частотой колебаний.
Промежуток времени Т (или τ), в течение которого точка совершает одно полное колебание, называется периодом колебаний.
По истечении периода фаза изменяется на 2π. Следовательно, должно kT=2π откуда период
 .
.
Величина υ, обратная периоду и определяющая число колебаний, совершаемых за одну секунду, называется частотой колебаний
υ  .
.
Отсюда видно, что величина k отличается от Т только постоянным множителем 2π. В дальнейшем мы обычно для краткости частотой колебаний будем называть величину k.
Значения а и α определяются по начальным условиям. Считая при t=0 x=x0, VX=V0 получим x0,= aSinα и  . Отсюда, складывая сначала квадраты этих равенств,а затем деля их почленно, найдем:
. Отсюда, складывая сначала квадраты этих равенств,а затем деля их почленно, найдем:
 .
.
 Отметим, что свободные колебания при отсутствии сопротивления обладают следующими свойствами: 1) амплитуда и начальная фаза колебаний зависят от начальных условий; 2) частота k, а следовательно, и период Т колебаний от начальных условий не зависят.
Отметим, что свободные колебания при отсутствии сопротивления обладают следующими свойствами: 1) амплитуда и начальная фаза колебаний зависят от начальных условий; 2) частота k, а следовательно, и период Т колебаний от начальных условий не зависят.
Рис.16
Влияние постоянной силы на свободные колебания точки. Пусть на точку М, кроме восстанавливающей силы F, направленной к центру О, действует еще постоянная по модулю и направлению сила Р (рис.16). Величина силы F по прежнему пропорциональна расстоянию от центра О, т.е. 
Очевидно, что в этом случае положением равновесия точки М будет центр О1 отстоящий от О на расстоянии ОО1=δст, которое определяется равенством сδст=Р или
 .
.
Величину δст назовем статическим отклонением точки. Примем центр O1 за начало отсчета и направим координатную ось О1х в сторону действия силы  . Тогда FX=- с(x+δст), PX=P. В результате, составляя дифференциальное уравнение движения и учитывая, что согласно равенству сδст=Р, будем иметь:
. Тогда FX=- с(x+δст), PX=P. В результате, составляя дифференциальное уравнение движения и учитывая, что согласно равенству сδст=Р, будем иметь:
 .
.
Отсюда заключаем, что постоянная сила Р не изменяет характера колебаний, совершаемых точкой под действием восстанавливающей силы F, а только смещает центр этих колебаний в сторону действия силы Р на величину статического отклонения δст.

