 2015-05-13
2015-05-13 1523
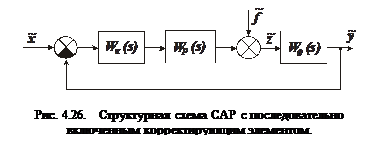
1523При последовательном соединении КУ передаточная функция САУ (рис. 4.26) в разомкнутом состоянии равна
 ,
,
 |
где
 - передаточная функция КУ.
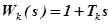
- передаточная функция КУ. Введение КУ в виде дифференцирующего звена  увеличивает быстродействие регулятора, особенно на участках резкого отклонения регулируемого параметра. Таким образом, введение производной от регулируемого параметра компенсирует инерционное запаздывание в регуляторе и улучшает качество регулирования. Однако дифференцирующее КУ одновременно усиливает вредное действие высокочастотных помех, т. к. такое звено хорошо пропускает высокочастотные колебания по сравнению с низкочастотными и совсем не пропускает постоянную составляющую регулируемого параметра (отклонения регулируемого параметра). Поэтому нельзя вести регулирование только по производной от отклонения регулируемого параметра. Обычно дифференцирующее КУ включают параллельно величине рассогласования (рис. 4.27). В этом случае передаточная функция КУ равна
увеличивает быстродействие регулятора, особенно на участках резкого отклонения регулируемого параметра. Таким образом, введение производной от регулируемого параметра компенсирует инерционное запаздывание в регуляторе и улучшает качество регулирования. Однако дифференцирующее КУ одновременно усиливает вредное действие высокочастотных помех, т. к. такое звено хорошо пропускает высокочастотные колебания по сравнению с низкочастотными и совсем не пропускает постоянную составляющую регулируемого параметра (отклонения регулируемого параметра). Поэтому нельзя вести регулирование только по производной от отклонения регулируемого параметра. Обычно дифференцирующее КУ включают параллельно величине рассогласования (рис. 4.27). В этом случае передаточная функция КУ равна
 .
.
 Сигнал на выходе из КУ пропорционален как отклонению регулируемого параметра
Сигнал на выходе из КУ пропорционален как отклонению регулируемого параметра  , так и его производной
, так и его производной  .
.
Если написать выражение для модуля  и аргумента
и аргумента  частотной функции КУ
частотной функции КУ
 ,
, 
и разомкнутой системы
 ,
,
 , (4.13)
, (4.13)
то можно сделать заключение, что введение КУ приводит к увеличению аргумента частотной функции разомкнутой САУ (вращает годограф Найквиста против часовой стрелки). Это приводит к увеличению запаса устойчивости системы регулирования. В выражениях (4.13) обозначено:
 - модуль передаточной функции разомкнутой системы до установки корректирующего устройства;
- модуль передаточной функции разомкнутой системы до установки корректирующего устройства;
 - аргумент передаточной функции разомкнутой системы до установки КУ;
- аргумент передаточной функции разомкнутой системы до установки КУ;
 - модуль передаточной функции системы после установки корректирующего устройства;
- модуль передаточной функции системы после установки корректирующего устройства;
 - аргумент передаточной функции разомкнутой системы после установки КУ.
- аргумент передаточной функции разомкнутой системы после установки КУ.
Последовательные КУ особенно целесообразно применять в электрических частях регуляторов, когда их можно набрать из электрических  - элементов.
- элементов.
Рассмотрим пример определения параметров КУ, включенного для коррекции характеристик чувствительного элемента температуры на входе в турбину двигателя. Известно, что термопара описывается уравнением апериодического звена и имеет передаточную функцию
 ,
,
где  - изображение по Лапласу напряжения на выходе из термопары;
- изображение по Лапласу напряжения на выходе из термопары;
 - изображение по Лапласу температуры газа,
- изображение по Лапласу температуры газа,
 - коэффициент передачи и постоянная времени термопары.
- коэффициент передачи и постоянная времени термопары.
При ступенчатом изменении температуры  напряжение на выходе из термопары
напряжение на выходе из термопары  изменяется по экспоненте (рис. 2.8). Время переходного процесса составляет
изменяется по экспоненте (рис. 2.8). Время переходного процесса составляет  . Для увеличения точности регулирования, особенно на переходных режимах работы двигателя необходимо уменьшать
. Для увеличения точности регулирования, особенно на переходных режимах работы двигателя необходимо уменьшать  . Термопары современных двигателей имеют постоянную времени
. Термопары современных двигателей имеют постоянную времени  , причем постоянная времени зависит не только от свойств материала спая, массы, но и от характера его обтекания, плотности газа. Уменьшение за счет снижения размеров термопары приводит к снижению ее прочности и ресурса. Поэтому для улучшения динамических характеристик термопар применяют КУ в виде дифференцирующего
, причем постоянная времени зависит не только от свойств материала спая, массы, но и от характера его обтекания, плотности газа. Уменьшение за счет снижения размеров термопары приводит к снижению ее прочности и ресурса. Поэтому для улучшения динамических характеристик термопар применяют КУ в виде дифференцирующего  -контура. Необходимо, чтобы на выходе из термопары сразу за изменением температуры следовало изменение напряжения . Это возможно, если термопара с КУ будет описываться уравнением пропорционального звена с коэффициентом
-контура. Необходимо, чтобы на выходе из термопары сразу за изменением температуры следовало изменение напряжения . Это возможно, если термопара с КУ будет описываться уравнением пропорционального звена с коэффициентом  .
.
 .
.
Из последнего равенства получим выражение для требуемой передаточной функции КУ
 .
.
Таким образом передаточная функция КУ имеет вид
 .
.
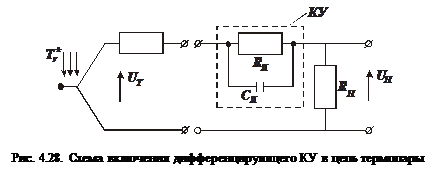 |
Такую передаточную функцию можно реализовать электрической
-цепью (рис. 4.28). Тогда передаточная функция КУ определяется как отношение
 , (4.14)
, (4.14)
где  - напряжение на входе в нагрузку, имеющую сопротивление
- напряжение на входе в нагрузку, имеющую сопротивление  . Для определения
. Для определения  в соответствие с равенством (4.14) воспользуемся законами Ома для замкнутой цепи
в соответствие с равенством (4.14) воспользуемся законами Ома для замкнутой цепи
 ,
,  ,
,
где  - суммарный импеданс замкнутой цепи. Так как
- суммарный импеданс замкнутой цепи. Так как  и
и  , то
, то  . Тогда справедливо равенство
. Тогда справедливо равенство
Обозначим  ,
,  , тогда выражение для примет вид
, тогда выражение для примет вид
 .
.
 Выражение реального КУ отличается от идеального КУ сомножителем
Выражение реального КУ отличается от идеального КУ сомножителем  . Чем меньше величина
. Чем меньше величина  , тем ближе выражение
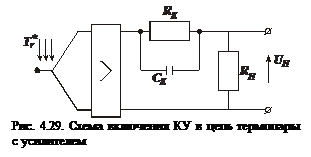
, тем ближе выражение  к коэффициенту , а следовательно и общее выражение к передаточной функции идеального КУ. Однако при этом сигнал на выходе из КУ ослабляется. Поэтому требуется подключить в цепь дополнительный усилитель (рис. 4.29). При этом коэффициент его усиления должен быть
к коэффициенту , а следовательно и общее выражение к передаточной функции идеального КУ. Однако при этом сигнал на выходе из КУ ослабляется. Поэтому требуется подключить в цепь дополнительный усилитель (рис. 4.29). При этом коэффициент его усиления должен быть  . Ввиду того, что
. Ввиду того, что  зависит от режима работы двигателя, то ее величина будет переменна. В этом случае
зависит от режима работы двигателя, то ее величина будет переменна. В этом случае  делают также переменным в зависимости от режима работы двигателя. Однако такие системы требуют установки дополнительных чувствительных и исполнительных элементов, поэтому применяют обычно КУ с
делают также переменным в зависимости от режима работы двигателя. Однако такие системы требуют установки дополнительных чувствительных и исполнительных элементов, поэтому применяют обычно КУ с  , настроенного на наибольшее значение в процессе работы двигателя.
, настроенного на наибольшее значение в процессе работы двигателя.
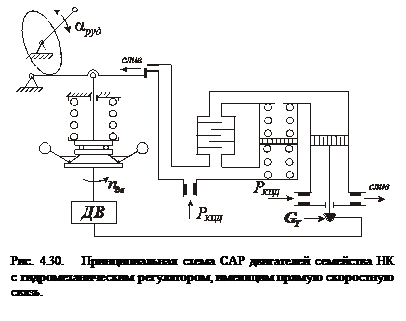 |
Дифферецирующие КУ можно реализовать и в гидромеханических регуляторах, например, в агрегатах дозировки топлива (АДТ) двигателей семейства НК (рис. 4.30). Подпружиненный с обеих сторон поршень выполняет роль электрической емкости  , а дросселирующий элемент – сопротивления
, а дросселирующий элемент – сопротивления  . За входной параметр КУ можно принять перепад давления на нем, а за выходной – расход жидкости. Тогда уравнения КУ в малых приращениях примут вид
. За входной параметр КУ можно принять перепад давления на нем, а за выходной – расход жидкости. Тогда уравнения КУ в малых приращениях примут вид
 (4.15)
(4.15)
где  - объемный расход жидкости на входе в КУ;
- объемный расход жидкости на входе в КУ;
 - расход жидкости через дросселирующий элемент;
- расход жидкости через дросселирующий элемент;
 - расход жидкости, обусловленный движением поршня;
- расход жидкости, обусловленный движением поршня;
 - перепад давления на КУ;
- перепад давления на КУ;
 - площадь торца поршня;
- площадь торца поршня;
 - жесткость пружины КУ.
- жесткость пружины КУ.
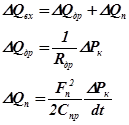
Переходя в (4.15) к изображениям по Лапласу, после преобразований получим:
 ,
,
где 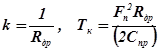 - коэффициент передачи и постоянной времени КУ.
- коэффициент передачи и постоянной времени КУ.
Из последнего выражения ясно, что чем больше сопротивление дросселя  , тем меньше коэффициент передачи КУ и больше постоянная времени . Во многих системах изменяют в зависимости от внешних условий и режима работы двигателя за счет автоматического подключения дополнительных дроссельных пакетов различного гидравлического сопротивления.
, тем меньше коэффициент передачи КУ и больше постоянная времени . Во многих системах изменяют в зависимости от внешних условий и режима работы двигателя за счет автоматического подключения дополнительных дроссельных пакетов различного гидравлического сопротивления.
В некоторых статических САУ с целью исключения статической ошибки регулирования последовательно в цепь регулятора включают интегрирующие КУ с передаточной функцией
 .
.
Однако такая коррекция делает систему астатической, т. е. склонной к колебаниям в процессе регулирования. Поэтому чаще применяют регуляторы с местной изодромной обратной связью.








