 2015-06-04
2015-06-04 25884
25884Понятие квадратичной формы. Матрица квадратичной формы. Канонический вид квадратичной формы. Метод Лагранжа. Нормальный вид квадратичной формы. Ранг, индекс и сигнатура квадратичной формы. Положительно определенная квадратичная форма. Квадрики.
Понятие квадратичной формы: функция на векторном пространстве, задаваемая однородным многочленом второй степени от координат вектора.
Квадратичной формой  от n неизвестных
от n неизвестных  называется сумма, каждое слагаемое которой является или квадратом одного из этих неизвестных, или произведением двух разных неизвестных.
называется сумма, каждое слагаемое которой является или квадратом одного из этих неизвестных, или произведением двух разных неизвестных.
Матрица квадратичной формы: Матрицу  называют матрицей квадратичной формы в данном базисе. В случае, если характеристика поля
называют матрицей квадратичной формы в данном базисе. В случае, если характеристика поля  не равна 2, можно считать, что матрица квадратичной формы симметрична, то есть
не равна 2, можно считать, что матрица квадратичной формы симметрична, то есть  .
.
Написать матрицу квадратичной формы:
 .
.
Здесь 
Следовательно,
В векторно-матричной форме квадратичная форма имеет вид:
 A
A  , где
, где 
Канонический вид квадратичной формы: Квадратичная форма называется канонической, если все  т. е.
т. е.

Всякую квадратичную форму можно привести к каноническому виду с помощью линейных преобразований. На практике обычно применяют следующие способы.
Метод Лагранжа: последовательное выделение полных квадратов. Например, если 
Затем подобную процедуру проделывают с квадратичной формой  и т. д. Если в квадратичной форме все
и т. д. Если в квадратичной форме все  но есть
но есть  то после предварительного преобразования дело сводится к рассмотренной процедуре. Так, если, например,
то после предварительного преобразования дело сводится к рассмотренной процедуре. Так, если, например,  то полагаем
то полагаем 
Нормальный вид квадратичной формы: Нормальной квадратичной формой называется такая каноническая квадратичная форма, у которой все коэффициенты равны +1 или -1.
Ранг, индекс и сигнатура квадратичной формы: Рангом квадратичной формы  А
А  называется ранг матрицы А. Ранг квадратичной формы не изменяется при невырожденных преобразованиях неизвестных.
называется ранг матрицы А. Ранг квадратичной формы не изменяется при невырожденных преобразованиях неизвестных.
Количество отрицательных коэффициентов - называется отрицательным индексом формы.
Число положительных членов в каноническом виде называется положительным индексом инерции квадратичной формы, число отрицательных членов - отрицательным индексом. Разность между положительным и отрицательным индексами называетсясигнатурой квадратичной формы
Положительно определенная квадратичная форма: Вещественная квадратичная форма  называется положительно определенной (отрицательно определенной), если при любых не равных одновременно нулю вещественных значениях переменных
называется положительно определенной (отрицательно определенной), если при любых не равных одновременно нулю вещественных значениях переменных 
 . (36)
. (36)
В этом случае матрица  также называется положительно определенной (отрицательно определенной).
также называется положительно определенной (отрицательно определенной).
Класс положительно определенных (отрицательно определенных) форм является частью класса неотрицательных (соответственно неположительных) форм.
Квадрики: Квадрик — n -мерная гиперповерхность в n +1-мерном пространстве, заданная как множество нулей многочлена второй степени. Если ввести координаты { x 1, x 2, xn +1} (в евклидовом или аффинном пространстве), общее уравнение квадрики имеет вид[1]
Это уравнение можно переписать более компактно в матричных обозначениях:

где x = { x 1, x 2, xn +1} — вектор-строка, x T — транспонированный вектор, Q — матрица размера (n +1)×(n +1) (предполагается, что хотя бы один её элемент ненулевой), P — вектор-строка, а R — константа. Наиболее часто рассматривают квадрики над действительнымиили комплексными числами. Определение можно распространить на квадрики в проективном пространстве, см. ниже.
Более общо, множество нулей системы полиномиальных уравнений известно как алгебраическое многообразие. Таким образом, квадрика является (аффинным или проективным) алгебраическим многообразием второй степени и коразмерности 1.
Преобразования плоскости и пространства.
Определение преобразования плоскости. Определение движения. свойства движения. Два вида движений: движение I рода и движение II рода. Примеры движений. Аналитическое выражение движения. Классификация движений плоскости (в зависимости от наличия неподвижных точек и инвариантных прямых). Группа движений плоскости.
Определение преобразования плоскости: Определение. Преобразование плоскости сохраняющее расстояние между точками называется движением (или перемещением) плоскости. Преобразование плоскости называется аффинным, если оно любые три точки, лежащие на одной прямой переводит в три точки также лежащие на одной прямой и при этом сохраняет простое отношение трех точек.
Определение движения: это преобразования фигур, при котором сохраняются расстояния между точками. Если две фигуры точно совместить друг с другом посредством движения, то эти фигуры одинаковы, равны.
Свойства движения: всякое сохраняющее ориентацию движение плоскости является либо параллельным переносом, либо поворотом, всякое меняющее ориентацию движение плоскости является либо осевой симметрией, либо скользящей симметрией. Точки, лежащие на прямой, при движении переходят в точки, лежащие на прямой, и сохраняется порядок их взаимного расположения. При движении сохраняются углы между полупрямыми.
Два вида движений: движение I рода и движение II рода: Движения первого рода - такие движения, которые сохраняют ориентацию базисов некоей фигуры. Они могут быть реализованы непрерывными движениями.
Движения второго рода - такие движения, которые изменяют ориентацию базисов на противоположную. Они не могут быть реализованы непрерывными движениями.
Примерами движений первого рода являются перенос и поворот вокруг прямой, а движениями второго рода - центральная и зеркальная симметрии.
Композицией любого числа движений первого рода является движение первого рода.
Композиция четного числа движений второго рода есть движение 1 рода, а композиция нечетного числа движений 2 рода - движение 2 рода.
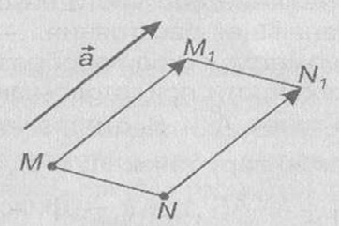
Примеры движений: Параллельный перенос. Пусть а — данный вектор. Параллельным переносом на вектор а называется отображение плоскости на себя, при котором каждая точка М отображается в точку М1, что вектор MМ1 равен вектору а.
Параллельный перенос является движением, поскольку представляет собой отображение плоскости на себя, сохраняющее расстояния. Наглядно это движение можно представить как сдвиг всей плоскости в направлении данного вектора а на его длину.
Поворот. Обозначим на плоскости точку О (центр поворота) и зададим угол α (угол поворота). Поворотом плоскости вокруг точки О на угол α называется отображение плоскости на себя, при котором каждая точка М отображается в точку М1, что ОМ = ОМ1 и угол MOМ1 равен α. При этом точка О остается на своем месте, т. е. отображается сама в себя, а все остальные точки поворачиваются вокруг точки О в одинаковом направлении — по часовой стрелке или против часовой стрелки (на рисунке изображен поворот против часовой стрелки).
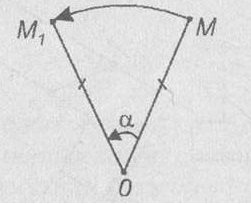
Поворот является движением, поскольку представляет собой отображение плоскости на себя, при котором сохраняются расстояния.
Аналитическое выражение движения: аналитическая связь, между координатами прообраза и образа точки имеет вид (1).
Классификация движений плоскости (в зависимости от наличия неподвижных точек и инвариантных прямых): Определение:
Точка плоскости инвариантной (неподвижной), если при данном преобразовании она переходит в себя.
Пример: При центральной симметрии инвариантной является точка центра симметрии. При повороте инвариантной является точка центра поворота. При осевой симметрии инвариантной является прямая — ось симметрии — это прямая инвариантных точек.
Теорема: Если движение не имеет ни одной инвариантной точки, то оно имеет хотя бы одно инвариантное направление.
Пример: Параллельный перенос. Действительно, прямые, параллельные этому направлению инвариантных как фигура в целом, хотя не состоит из инвариантных точек.
Теорема: Если движется какой-то луч, луч переводит в себя, то это движение либо тождественное преобразование, либо симметрия относительно прямой содержащей данный луч.
Поэтому по наличию инвариантных точек или фигур можно провести классификацию движений.
| Название движения | Инвариантные точки | Инвариантные прямые |
| Движение I рода. | ||
1.  - поворота - поворота  | (центр) - 0 | нет |
| 2. Тождественное преобразование | все точки плоскости | все прямые |
3. Центральная симметрия  | точка 0 - центр | все прямые, проходящие через точку 0 |
4. Параллельный перенос  | нет | все прямые  |
| Движение II рода. | ||
5. Осевая симметрия.  | множество точек  | ось симметрии (прямая  ) все прямые ) все прямые  |
Группа движений плоскости: В геометрии важную роль играют группы самосовмещений фигур. Если  - некоторая фигура на плоскости (или в пространстве), то можно рассмотреть множество
- некоторая фигура на плоскости (или в пространстве), то можно рассмотреть множество  всех тех движений плоскости (или пространства), при которых фигура переходит в себя.
всех тех движений плоскости (или пространства), при которых фигура переходит в себя.
Это множество является группой. Например, для равностороннего треугольника  группа движений плоскости, переводящих треугольник в себя, состоит из 6 элементов: поворотов на углы
группа движений плоскости, переводящих треугольник в себя, состоит из 6 элементов: поворотов на углы  вокруг точки
вокруг точки  и симметрий относительно трех прямых.
и симметрий относительно трех прямых.
Они изображены на рис. 1 красными линиями. Элементы группы самосовмещений правильного треугольника могут быть заданы и иначе. Чтобы пояснить это, пронумеруем вершины правильного треугольника числами 1, 2, 3. Любое самосовмещение  треугольника переводит точки 1, 2, 3 в те же самые точки, но взятые в ином порядке, т.е. может быть условно вписано в виде одной из таких скобок:
треугольника переводит точки 1, 2, 3 в те же самые точки, но взятые в ином порядке, т.е. может быть условно вписано в виде одной из таких скобок:
 и т.д.
и т.д.
где числами 1, 2, 3 обозначены номера тех вершин, в которые переходят вершины 1, 2, 3 в результате рассматриваемого движения.
Проективные пространства и их модели.
Понятие проективного пространства и модели проективного пространства. Основные факты проективной геометрии. Связка прямых с центром в точке O – модель проективной плоскости  . Проективные точки. Расширенная плоскость – модель проективной плоскости. Расширенное трехмерное аффинное или евклидово пространство – модель проективного пространства
. Проективные точки. Расширенная плоскость – модель проективной плоскости. Расширенное трехмерное аффинное или евклидово пространство – модель проективного пространства  . Изображения плоских и пространственных фигур при параллельном проектировании.
. Изображения плоских и пространственных фигур при параллельном проектировании.
Понятие проективного пространства и модели проективного пространства:
Проективное пространство над полем  — пространство, состоящее из прямых (одномерных подпространств) некотороголинейного пространства
— пространство, состоящее из прямых (одномерных подпространств) некотороголинейного пространства  над данным полем. Прямые пространства называются точками проективного пространства. Это определение поддаётся обобщению на произвольное тело
над данным полем. Прямые пространства называются точками проективного пространства. Это определение поддаётся обобщению на произвольное тело 
Если  имеет размерность
имеет размерность  , то размерностью проективного пространства называется число
, то размерностью проективного пространства называется число  , а само проективное пространство обозначается
, а само проективное пространство обозначается  и называется ассоциированным с (чтобы это указать, принято обозначение
и называется ассоциированным с (чтобы это указать, принято обозначение  ).
).
Переход от векторного пространства размерности к соответствующему проективному пространству называется проективизацией пространства .
Точки можно описывать с помощью однородных координат.
Основные факты проективной геометрии: Проективная геометрия — раздел геометрии, изучающий проективные плоскости и пространства. Главная особенность проективной геометрии состоит в принципе двойственности, который прибавляет изящную симметрию во многие конструкции. Проективная геометрия может изучаться как с чисто геометрической точки зрения, так с аналитической (с помощью однородных координат) и салгебраической, рассматривая проективную плоскость как структуру над полем. Часто, и исторически, вещественная проективная плоскость рассматривается как Евклидова плоскость с добавлением «прямой в бесконечности».
Тогда как свойства фигур, с которыми имеет дело Евклидова геометрия, являются метрическими (конкретные величины углов, отрезков, площадей), а эквивалентность фигур равнозначна их конгруэнтности (т.е. когда фигуры могут быть переведены одна в другую посредством движения с сохранением метрических свойств), существуют более "глубоко лежащие" свойства геометрических фигур, которые сохраняются при преобразованиях более общего типа, чем движение. Проективная геометрия занимается изучением свойств фигур, инвариатных при классе проективных преобразований, а также самих этих преобразований.
Проективная геометрия дополняет Евклидову, предоставляя красивые и простые решения для многих задач, осложнённых присутствием параллельных прямых. Особенно проста и изящна проективная теория конических сечений.
Есть три главных подхода к проективной геометрии: независимая аксиоматизация, дополнение Евклидовой геометрии, и структура над полем.
Аксиоматизация
Проективное пространство можно определить с помощью разного набора аксиом.
Коксетер предоставляет следующие:
1. Существует прямая и точка не на ней.
2. На каждой прямой есть по крайней мере три точки.
3. Через две точки можно провести ровно одну прямую.
4. Если A, B, C, и D — различные точки и AB и CD пересекаются, то AC и BD пересекаются.
5. Если ABC — плоскость, то существует по крайней мере одна точка не в плоскости ABC.
6. Две различные плоскости пересекаются по крайней мере в двух точках.
7. Три диагональные точки полного четырёхугольника не коллинеарны.
8. Если три точки на прямой X инвариантны по отношению к проективности φ, то все точки на X инвариантны по отношению к φ.
Проективная плоскость (без третьего измерения) определяется несколько другими аксиомами:
1. Через две точки можно провести ровно одну прямую.
2. Любые две прямые пересекаются.
3. Существует четыре точки, из которых нет трёх коллинеарных.
4. Три диагональные точки полных четырёхугольников не коллинеарны.
5. Если три точки на прямой X инвариантны по отношению к проективности φ, то все точки на X инвариантны по отношению к φ.
6. Теорема Дезарга: Если два треугольника перспективны сквозь точку, то они перспективны сквозь прямую.
При наличии третьего измерения, теорема Дезарга может быть доказана без введения идеальных точки и прямой.
Расширенная плоскость – модель проективной плоскости: возьмем в аффинном простран- стве A3 связку прямых S(O) с центром в точке O и плоскость Π, не проходя- щую через центр связки: O 6∈ Π. Связка прямых в аффинном пространстве является моделью проективной плоскости. Зададим отображение множества точек плоскости Π на множество прямых связки S (Бля, молись если достался этот вопрос, прости)
Расширенное трехмерное аффинное или евклидово пространство – модель проективного пространства :
Для того, чтобы сделать отображение сюръективным, повторим процесс формального расширения аффинной плоскости Π до плоскости проективной, Π, дополняя плоскость Π множеством несобственных точек {M∞} таким, что: ({M∞}) = P0(O). Поскольку в отображении прообразом каждой плоскости связки плоскостей S(O) является прямая на плоскости d, то очевидно, что множество всех несобственных точек расширенной плоскости: Π = Π ∩ {M∞}, {M∞}, представляет собой несобственную прямую d∞ расширенной плос- кости, являющуюся прообразом особой плоскости Π0: (d∞) = P0(O) (= Π0). (I.23) Договоримся, что последнее равенство P0(O) = Π0 здесь и в дальнейшем мы будем понимать в смысле равенства множеств точек, но наделенных раз- личной структурой. Дополнив аффинную плоскость несобственной прямой, мы добились того, что отображение (I.21) стало биективным на множестве всех точек расширенной плоскости:
Изображения плоских и пространственных фигур при параллельном проектировании:
В стереометрии изучаются пространственные фигуры, однако на чертеже они изображаются в виде плоских фигур. Каким же образом следует изображать пространственную фигуру на плоскости? Обычно в геометрии для этого используется параллельное проектирование. Пусть p - некоторая плоскость, l - пересекающая ее прямая (рис. 1). Через произвольную точку A, не принадлежащую прямой l, проведем прямую, параллельную прямой l. Точка пересечения этой прямой с плоскостью p называется параллельной проекцией точки A на плоскость p в направлении прямой l. Обозначим ее A '. Если точка A принадлежит прямой l, то параллельной проекцией A на плоскость p считается точка пересечения прямой l с плоскостью p.
Таким образом, каждой точке A пространства сопоставляется ее проекция A ' на плоскость p. Это соответствие называется параллельным проектированием на плоскость p в направлении прямой l.
Группа проективных преобразований. Приложение к решению задач.
Понятие проективного преобразования плоскости. Примеры проективных преобразований плоскости. Свойства проективных преобразований. Гомология, свойства гомологии. Группа проективных преобразований.
Понятие проективного преобразования плоскости: Понятие проективного преобразования обобщает понятие центральной проекции. Если выполнить центральную проекцию плоскости α на некоторую плоскость α1, затем проекцию α1 на α2, α2 на α3, … и, наконец, какой-то плоскости α n опять на α1, то композиция всех этих проекций и есть проективное преобразование плоскости α; в такую цепочку можно включить ипараллельные проекции.
Примеры проективных преобразований плоскости: Проективным преобразованием пополненной плоскости называется ее взаимно-однозначное отображение на себя, при котором сохраняется коллинеарность точек, или, другими словами, образом любой прямой является прямая. Всякое проективное преобразование есть композиция цепочки центральных и параллельных проекций. Аффинное преобразование – это частный случай проективного, при котором бесконечно удаленная прямая переходит сама в себя.
Свойства проективных преобразований:
При проективном преобразовании три точки не лежащие на прямой переходят в три точки не лежащие на прямой.
При проективном преобразовании репер переходит в репер.
При проективном преобразовании прямая переходит в прямую, пучок переходит в пучок.
Гомология, свойства гомологии:
Проективное преобразование плоскости, которое имеет прямую инвариантных точек, а значит, и пучок инвариантных прямых называется гомологией.
1. Прямая, проходящая через несовпадающие соответственные точки гомологии, является инвариантной прямой;
2. Прямые, проходящие через несовпадающие соответственные точки гомологии, принадлежат одному пучку, центр которого является инвариантной точкой.
3. Точка, ее образ и центр гомологии лежат на одной прямой.
Группа проективных преобразований: рассмотрим проективное отображение проективной плоскости P2 на себя, то есть проективное преобразование этой плоскости (P2’ = P2).
Как и прежде композицией f проективных преобразований f1 и f2 проективной плоскости P2 назовем результат последовательного выполнения преобразований f1 и f2: f = f2°f1.
Теорема 1: множество H всех проективных преобразований проективной плоскости P2 является группой относительно композиции проективных преобразований.








