 2014-02-02
2014-02-02 17103
17103Передаточные функции основных соединений звеньев
В системах автоматического управления звенья могут находиться в самых различных сочетаниях. Однако систему любой сложности всегда можно рассматривать как совокупность трех видов соединений элементарных звеньев: последовательного, параллельного и встречно-параллельного соединений (с обратной связью).
1. Последовательное соединение.

Последовательное соединение – это такое соединение звеньев, при котором выходная величина предыдущего звена является входной величиной последующего.
Для данного рисунка xвых1=хвх2, хвых2=хвх3
По определению ПФ: 
Для каждого звена можем записать:
Учитывая, что xвых1=хвх2, хвых2=хвх3 исключаем из уравнений промежуточные переменные:

Отсюда, ПФ последовательных звеньев:

Вывод: передаточная функция группы последовательно соединенных звеньев равна произведению отдельных звеньев.
2. Параллельное соединение звеньев.
Параллельным называют соединение звеньев, при котором входные воздействия всех звеньев одинаковы, а их выходные сигналы алгебраически суммируются.
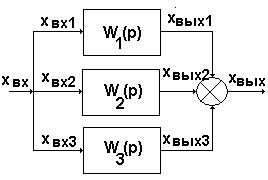
Для данного рисунка xвх1(p)=хвх2(p)=хвх3(p)=хвх(p)
xвых(p)=хвых1(p)+хвых2(p)+хвых3(p)
Для каждого звена можем записать:

откуда 
Вывод: передаточная функция группы параллельно соединенных звеньев равна сумме отдельных звеньев.
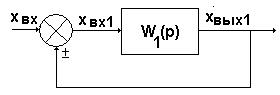
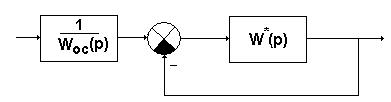
3. Встречно-параллельное соединение звеньев с обратной связью.
Встречно-параллельным называется такое соединение звеньев, при котором выходная величина звена подается обратно на его вход через другое звено. Часто такое соединение называют соединением с обратной связью (ОС). При этом звено в прямой цепи называется звеном, охваченным обратной связью, а звено, стоящее в цепи обратной связи – звеном ОС. Сигнал с выхода звена ОС может складываться или вычитаться с входным сигналом. Соответственно, ОС называется положительной или отрицательной.
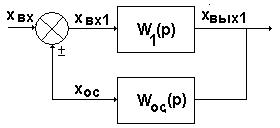
xвх1(p)=хвх(p)±хос(p)
Для каждого звена можем записать:
Нужно исключить переменные хвх1 и хос

Умножаем левую и правую часть на W1(p)

или 
Частный случай:  - единичная обратная связь.
- единичная обратная связь.
Приведем систему с неединичной обратной связью к этому виду:

Типовые динамические звенья
При исследовании сложных технических объектов широко применяется принцип декомпозиции, то есть разбиения сложного на простые составляющие. В ТАУ широко используют разбиение сложных САУ на элементарные звенья – типовые звенья.
Типовыми называют звенья, динамика которых описывается дифференциальными уравнениями не выше 2-го порядка.
Для описания большинства реальных технических систем достаточно типовых звеньев:
1. Безинерционное-усилительное звено.
4. Апериодическое звено 1-го порядка.
5. Инерционное звено 2-го порядка.
А) апериодическое звено 2-го порядка;
Б) колебательное звено 2-го порядка;
В) консервативное колебательное звено.
6. Звено запаздывания.
ФЧХ
ВЧХ
АЧХ
ДУ® ОФДУ® ПФ ®АФХ
ПХ
ФЧХ
МЧХ
АЧХ
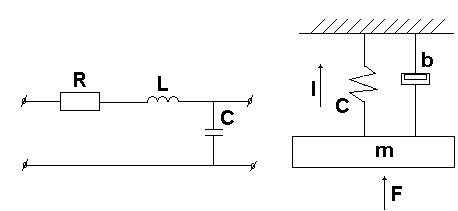
Инерционное звено 2-го порядка.
ДУ: 
Примеры:

другой вид: 
 ,
,  ,
, 
r - показатель колебательности.
ОФ: 
ПФ: 
Для анализа решения рассмотрим характеристическое уравнение:
а) r>1 D>0 – разные вещественные корни;
б) r=1 D=0 – одинаковые вещественные корни;
в) 01 D– пара комплексно-сопряженных корней;
г) r=0 

а) r>1

имеем пару вещественных корней, в этом случае характеристическое уравнение можно разложить на два многочлена:
В этом случае передаточную функцию звена 2-го порядка можно представить в виде произведений ПФ 1-х порядков.

ПХ: 
б) r=1, T1=T2=T

ПХ:  - при r>=1 имеем апериодическое звено 2-го порядка.
- при r>=1 имеем апериодическое звено 2-го порядка.
в) 0<r<1 
ПХ: 
a - показатель затухания колебаний.
Такое звено называется колебательным звеном 2-го порядка.
г) r=0 
Имеем незатухающие колебания. Такое звено называется консервативным колебательным.

ВЧХ: 
МЧХ: 
АЧХ: 
ФЧХ: 
| w | A(w) | j(w) |
| ®0 | k | 0 |
| w=1/T | k/2rTw | -p/2 |
| w®¥ | ®0 | -p |
r®0 A(w)®¥

