 2015-01-22
2015-01-22 1033
10331 Обзор ТПМтт.
2 Анализ характерных особенностей технологического процесса.
3 Требования к ЭП.
1 Обзор ТПМТТ.
Причина успешного внедрения тягового ЭП:
1) увелич. масштабов и объемов добычи полезных ископаемых открытым способом.
2) интенсификация перевозок в труднодоступных районах;
3) необходимость разработки машин, не загрязняющих воздух в городах
4) низкий шум, вместимость, прогрессивные технические решения (автобусы маршрутные такси.
Обзор (классификация):
а) по роду привода:
- транспортные средства (ТС) с автономным приводом;
- ТС с троллейным и кабельным питанием;
б) по виду механизма передвижения:
1) на колесном ходу (безрельсовые, напольные транспортные средства – ТС),
2) ТС на рельсовом ходу. В соответствии с номенклатурой, согласованной между странами, в зависимости от конструктивных особенностей безрельсовые машины делят:
1 – электротягачи,
2 - эл/тележки,
3 - эл/тележки с ПУ,
4 - эл/погрузчики и эл/штабелеры,
5 - эл/мобили,
6 -специальныеподъемно-транспортные средства с ЭП.
ЭЛЕКТРОМОБИЛИ (ЭМ). Это автономные ТС автономной эл/устаеновкой. К ЭМ относятся карьерные автомобили с ДВС и ЭП «БелАЗ». Не обязательно, чтобы привод был электрическим, возможно сочетание с электрической трансмиссией. Качества, характеризующие его отличие от др. ТС:
1) автономность энергоустановки и самого ЭМ;
2) использование в качестче первоисточника энергии химического источника тока.
В зависимости от условий работы, эксплуатации и характера технологических циклов ЭМ делят:
1) городские ЭМ - ГЭМ 0,3..3 т., пассаж. и грузовые перевозки;
2) КЭМ – карьерные ЭМ (самосвальные автопоезда) 75..180 т., энергоустановки дизель-генератор 600..1500 кВт;
3.1) резание и выбор грунта, перевозка грунта, возвращение в забой – копающие погрузчики, скрепера;
3.2) резание и режимы перемещения и разравнивания грунта (бульдозеры, автогрейдеры и планировщики);
4) ВЭМ – внутризаводские ЭМ (напольный безрельсовый транспорт) 4,5 т. 150 м. Штабелеры до 50 м., Эл/тележки до 10 т. до 1000м., тягачи более 200м.;
5) ЭМПП – повышенной проходимости. Многоприводные шасси с индивидуальным приводом ведущих колес или многозвенные автопоезда (лидер с активной эл/установкой и грузовые платформы). К ТС с троллейным питанием относятся троллейбусы, трамваи, метрополитен и др.
2 Анализ характерных особенностей технологического процесса.
Троллейбусы. По сравнению со стационарными установками тяговое эл/оборудование работает в тяжелых условиях (неровности дороги – колебания, вибрации кинематики и т.д.), загрязнения, вода, проникающие в оборудование при движении, работают с резко–переменной нагрузкой ан меняющемся профиле пути.
Характерные особенности технологического процесса ТПМтт конкретно для ГЭМ: эксплуатация на дорогах с покрытием. Основные требования к ГЭМ: обеспечение высоких тягово-динамических свойств и средней скорости 30..60 км/ч. это диктует особенность их транспортных циклов: характерны часто вынужденные остановки 1..2,5 км, интенсивные разгон после трогания, выдержка установленной скорости в условиях уличного движения.
КЭМ. Составляющие одного транспортного цикла: погрузочные операции – ожидание, маневрирование под погрузку, погрузка; движение с грузом по временным дорогам, подъем к месту разгрузки по постоянны трассам; разгрузочные операции: ожидание, маневрирование, разгрузка; движение в забой. Дороги с уклоном 10..12% и улучшенным покрытием.
ЗТМ. Основная технологическая операция: разработка грунта. Силовой процесс, характеризующийся максимальным тяговым усилием и малой скоростью движения 2..8 км/ч. при резании, копании – работа в режиме на упор. В режиме перевозки (скреперы) – тяговое усилие ниже копания и соответствует усилиям, развиваемым КЭМ. Машины работают вне дорог и на ограниченных площадках и перемещаются по криволинейным траекториям с малым радиусом поворота.
ВЭМ. У всех моделей погрузчиков и штабелеров расход эл/энергии на технологические операции соизмерим, а иногда и превышает расход на транспортные операции.
ЭМПП. Одна из нескольких энергоустановок питает значительное (более 4х тяговых двигателей колес), нагрузки которых в один момент существенно отличаются.
3 Требования к ЭП ТПМтт.
ЭП делится на составные части:
1) энергоустановку – ЭУ,
 2) привод ведущих колес – ПВК,
2) привод ведущих колес – ПВК,
3) аппаратуру регулирования (АР). Базовая структура системы СТЭП изображена на рисунке. СТЭП представляет собой совокупность источника постоянного тока и ЭП ведущих колес, конструктивно оформленные в виде мотор-осей, мотор-колес, совместная работа которых определяется аппаратурой регулирования АР.
Требования к ЭП - применительно к ГЭМ:
1) функциональные требования:
1.1) Плавное изменение скорости 3..70 км/ч.
1.2) стабильность автоматического поддержания установившейся скорости 20..60 км/ч не ниже 10%. Это энергетически выгодно для движения в уличном потоке
1.3) плавное управление тяговым моментом при трогании и разгоне
1.4) обеспечение высоких тягово-динамических свойств
1.5) плавное управление тормозным моментом при скорости выше 15 км\ч
1.6) ограничение момента и мощности на заданном уровне
1.7) заряд тока батарей при рекуперации энергии при движении под уклон
1.9) возможность работы в режиме выбега, наката с плавным переходом в режим тяги или динамического торможения. 1.10) реверс только после остановки ЭМ.
2) Конструктивные требования:
2.1) масса ТЭП меньше 5..6% от всей массы ЭМ,
2.2) узлы, агрегаты ТЭП выполняются в виде конструктивно законченных модулей, легко заменяются в условиях эксплуатации
2.3) защита от попадания грязи, воды и т.п,
2.4) защита от сбоев при кратковременном перерыве питания,
2.5) условия эксплуатации соответствуют требованиям, и обеспечивается периодичное техобслуживание.
3) экономические требования.
3.1) начальная стоимость не должна превышать 15..20% стоимости ЭМ.
3.2) трудоекость технического обслуживания ТЭП не должна превышать 30..40% от общей ТЁ в целом.
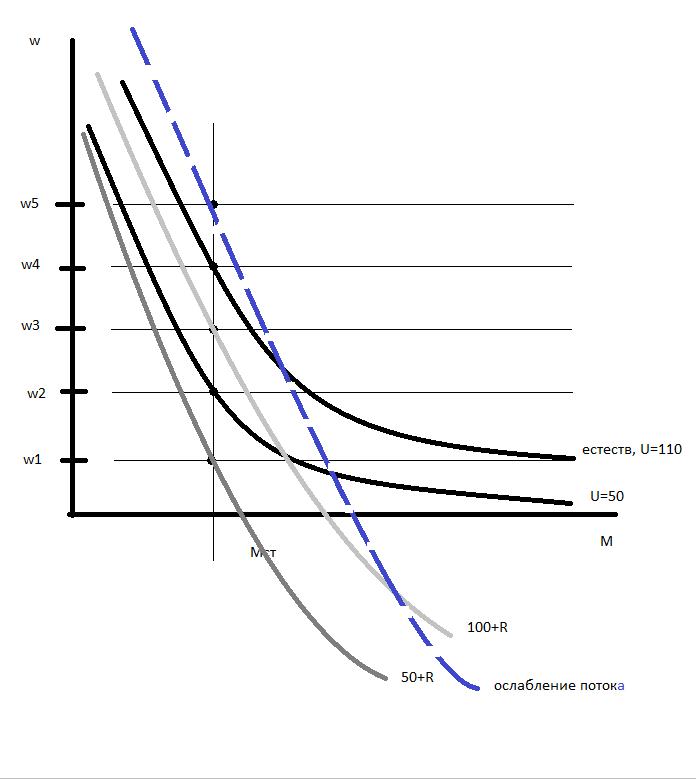
Аналогично формулируются требования и для других ЭМ с учетом допустимых требований из-за специфики процессов, например, для ЗТМ из-за режима работы на упор – повышенные требования к устройствам автоматического ограничения тягового усилия и защиты оборудования от перегрузок. Для ГЭМ – учет грузового потока – повышенные требования к параметрам устройств электрического торможения.
|
Тема: Особенности ЭП ТПМтт.
1 Формирование характеристик тягового типа.
2 Многодвигательный ЭП с дифференциальм.
3 ЭП по схеме “мотор-колесо”.
1 Формирование характеристик тягового типа.
Главные эксплуатационные показатели ТПМтт, оказывающие влияние на выбор аппаратов СТЭП:
1) полная масса груженного ТС (G эл.гр.);
2) свободная отдаваемая на тягу мощность энергоустановки (Рэу);
3) длительная номинальная суммарная сила тяги при номинальной скорости (Fном);
4) масса колес (mК);
5) максимальная сила тяги при максимальной скорости (Fмах).
Усилие F от скорости v имеет предельную зависимость  . предельная зависимости зависит от: КПД передачи силовой цепи преобразования и передачи энергии. В зависимости F(v) определяют требуемую кратность максимальной скорости и максимальной силы: Kv=Vmax / Vном, КF = Fmax / F ном. Обеспечивается регулирование скорости двигателя Wд на валу электродвигателя привода ведущих колес.
. предельная зависимости зависит от: КПД передачи силовой цепи преобразования и передачи энергии. В зависимости F(v) определяют требуемую кратность максимальной скорости и максимальной силы: Kv=Vmax / Vном, КF = Fmax / F ном. Обеспечивается регулирование скорости двигателя Wд на валу электродвигателя привода ведущих колес.
Кратность максимальной скорости и момента равна Kw = Wmax / Wном = 3..6;
Km = Mmax / Mном = 3..4. Пусковой момент достигает величины 3..4 Мном.
Тяговая характеристика ЭМ имеет вид:  , где c - коэффициент жесткости. При разработке СТЭП обеспечивается заданное изменение F и скорости v –значение c переменное и зависит от многих причин. Более всего на c оказывает влияние кроме регулирующих свойств и показателей тяговых двигателей параметры и внешняя характеристика энергоустановки. Значение коэффициента c определяют способам взаимного регулирования ЭУ и ТЭД.
, где c - коэффициент жесткости. При разработке СТЭП обеспечивается заданное изменение F и скорости v –значение c переменное и зависит от многих причин. Более всего на c оказывает влияние кроме регулирующих свойств и показателей тяговых двигателей параметры и внешняя характеристика энергоустановки. Значение коэффициента c определяют способам взаимного регулирования ЭУ и ТЭД.
Переключение групп источников: 1) регулирование скорости, 2) управление магнитным потоков ТЭД.
Можно использовать многоскоростные передачи ПВК и др. Вид тяговой характеристики электродвигателя: МХ ТЭД может быть выражена в виде:  . Если c = const, но в действительности переменная. Коэффициент жесткости для каждого участка:
. Если c = const, но в действительности переменная. Коэффициент жесткости для каждого участка:
 ;
;  - для электромобиля.
- для электромобиля.
Вопрос 2: Многодвигательный ЭП с дифференциалом. Кинематическая схема на карточке.
 Описание кинематической схемы: М1, М2 – двигатели; 1,2 – ведущие шестерни; 3 – выходная шестерня- зубчатое колесо планетарной передачи с подвижной осью вращения; 4’, 4’’ – шестерни сателлиты; 5 – дополнительная шестерня дифференциала; 6 – подшипники сателлитов. При вращении М1 и М2 ведущие шестерни 1и 2 обкатываются по сателлитам 4, ось вращения а-а которых связана с выходной шестернью. Вращение сателлитов приводит к вращению их оси а-а, а значит и шестерни 3, от которой движение через 5 передается рабочему органу. Моменты выходной шестерни равны сумме моментов двигателей:
Описание кинематической схемы: М1, М2 – двигатели; 1,2 – ведущие шестерни; 3 – выходная шестерня- зубчатое колесо планетарной передачи с подвижной осью вращения; 4’, 4’’ – шестерни сателлиты; 5 – дополнительная шестерня дифференциала; 6 – подшипники сателлитов. При вращении М1 и М2 ведущие шестерни 1и 2 обкатываются по сателлитам 4, ось вращения а-а которых связана с выходной шестернью. Вращение сателлитов приводит к вращению их оси а-а, а значит и шестерни 3, от которой движение через 5 передается рабочему органу. Моменты выходной шестерни равны сумме моментов двигателей:
Мдиф = М1 + М2. Уравнение механической характеристики:
 ;
;  ;
;  (жесткость МХ диффер-ла).
(жесткость МХ диффер-ла).
1. МХ первый и второй двигатели одинаковые:
2. МХ1 на равна МХ2:
Применение дифференциала дает дополнительные возможности плавного регулирования скорости ЭП. При вращении двигателей в разные стороны МХ аналогична характеристике динамического торможения.
3 Электропривод по схеме мотор-колесо. (МК)
ЭП с использованием МК открывает новые возможности рациональной компоновки схем. МК- исполнительный механизм систем тягового ЭП.
В нем осуществляется преобразование электроэнергии вырабатываемой автономным источником питания в механическую энергию.
МК конструктивно объединяет: тяговый двигатель, механическую передачу, колесо и др.
Особенность МК - рациональная компоновка, двигатель полностью размещен внутри обода около колеса.
Основные базовые параметры:
1) Номинальная нагрузка на шину (Gk)
2) Max скорость (Vmax)
3) Удельная расчетная мощность (Ne’’)
4) Среднее значение удельной силы тяги (f)
5) Max динамический фактор (D)
Тяговая характеристика одного колеса:
 ; F- суммарная сила тяги, mk - количество ведущих колес.
; F- суммарная сила тяги, mk - количество ведущих колес.
 - предельная мощность.
- предельная мощность.
Если величина Рк=const, то предельная тяговая характеристика описывается уравнением: Fk*V=const;
Соотношение базовых параметров и параметров длительного режима работы двигателя.
 (1)
(1)  (2)
(2)
т.к.  откуда следует:
откуда следует:
 (3);
(3);  (4)
(4)
 (5)
(5)  (6)
(6)
Ка -коэф., учитывающий значение Ne’’ - коэф. энерговооруженности:
 ;
;
Тема: Обзор АЭП ТПМТТ.
1 Обзор и краткий анализ систем АЭП ТПМТТ.
2 Типовые схемные решения АЭП электропогрузчика (лабораторная работа N8).
1 Обзор и краткий анализ систем АЭП ТПМТТ.
1. АЭП напольного безрельсового транспорта - ЭП постоянного тока. Автономный источник питания тяговые аккумуляторные батареи.
ТЭД-ДПТ смешанного возбуждения (для механизмов подъёма)
ДПТ последовательного возбуждения – механизм передвижения.
В этой группе:
А) Пуск двигателя подъема прямой на х.х. Регулирование скорости изменением под-
водимого напряжения. Путем секционирования батарей, введением сопротивления и ослаблением поля. Управление с помощью контакторов.
Б) ЭП с тиристорными преобразователями с питанием от АБ (ШИР)








