 2015-05-12
2015-05-12 1230
1230Типовая схема системы с корректирующим фильтром представлена на Рис.14.1
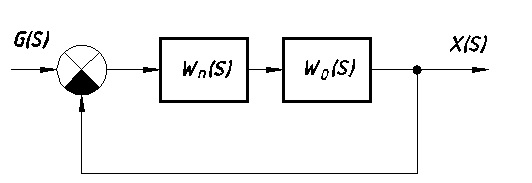
Рис 14.1
 -передаточная функция корректирующего устройства
-передаточная функция корректирующего устройства
 -передаточная функция неизменяемой части
-передаточная функция неизменяемой части
Передаточная функция разомкнутой системы:

Параллельные корректирующие устройства
Типовая схема системы с параллельным устройством представлена на Рис.14.2
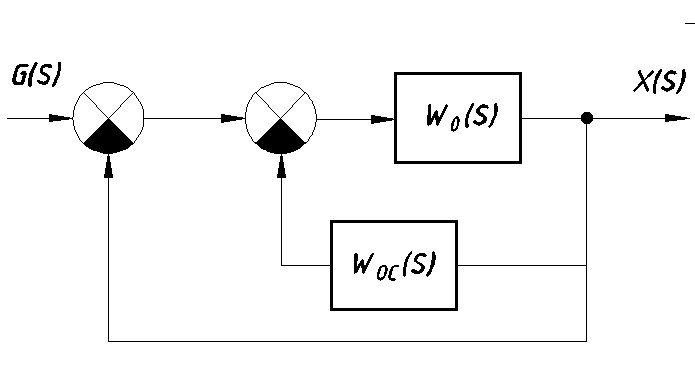
Рис. 14.2
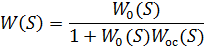
Передаточная функция замкнутой системы:
Типы последовательных корректирующих устройств
1. Пропорциональный регулятор. Передаточная функция:

С увеличением коэффициента k увеличивается точность и быстродействие системы, но при этом может произойти потеря устойчивости.
2.  – дифференцирование с запаздыванием – введение производной от ошибки. Структурная схема системы с таким типом коррекции представлена на рисунке 14.3
– дифференцирование с запаздыванием – введение производной от ошибки. Структурная схема системы с таким типом коррекции представлена на рисунке 14.3
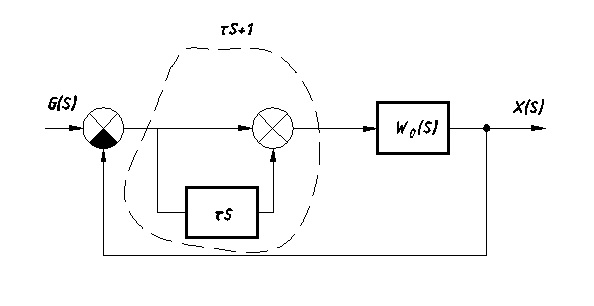
Рис. 14.3
Передаточная функция разомкнутой системы:

Аплитудно-частотная характеристика системы:

Фазо-частотная характеристика системы:

При использовании такой коррекции увеличивается запас устойчивости (см. Рис. 14.4)
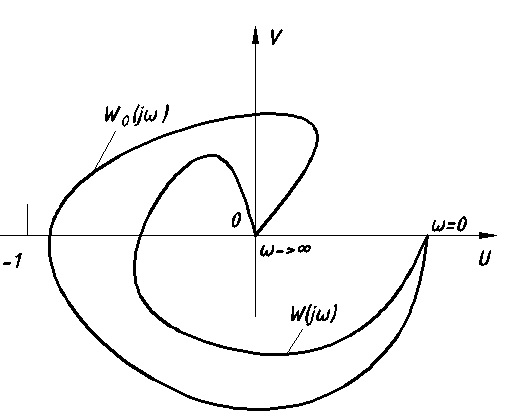
Рис. 14.4
3. Интегратор. Передаточная функция звена:

Передаточная функция разомкнутой системы:
Аплитудно-частотная характеристика системы:
Фазо-частотная характеристика системы:

При использовании такого устройства увеличивается точность за счет введения астатизма, но при этом система может потерять устойчивость (см. Рис. 14.5)
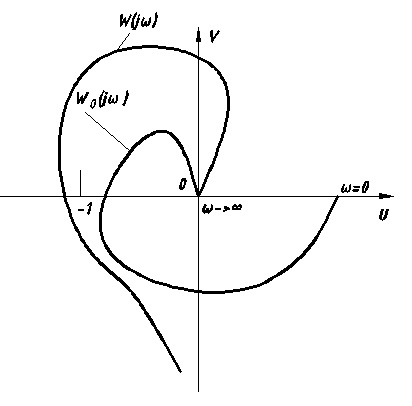
Рис. 14.5
4. Изодромное звено. Передаточная функция:
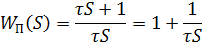
Данное звено включает в себя преимущества интегрирующего и дифференцирующего звеньев, при этом не меняет фазы. Позволяет без введения астатизма уменьшить статическую ошибку, воздействую на низкочастотную область. Структурная схема системы с изодромным звеном приведена на Рис. 14.6
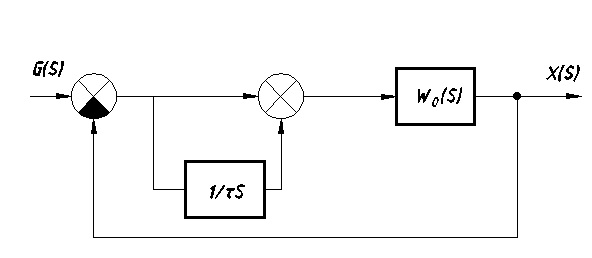
Рис. 14.6
5.  – дифференциальный регулятор
– дифференциальный регулятор
6. 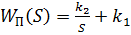 – пропорционально-интегрирующий регулятор
– пропорционально-интегрирующий регулятор
7.  – пропорционально-дифференциальный регулятор
– пропорционально-дифференциальный регулятор
8.  – пропорционально-интегрально-дифференциальный регулятор
– пропорционально-интегрально-дифференциальный регулятор








