 2015-05-12
2015-05-12 790
790Вводятся в виде местных обратных связей («+» или «-»)
Основные виды:




Возможны и другие виды ОС.
► Пример 1
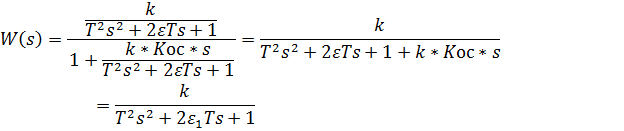
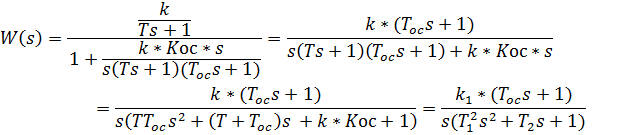
Положительная жесткая ОС охватывает положит. апериодическое звено.
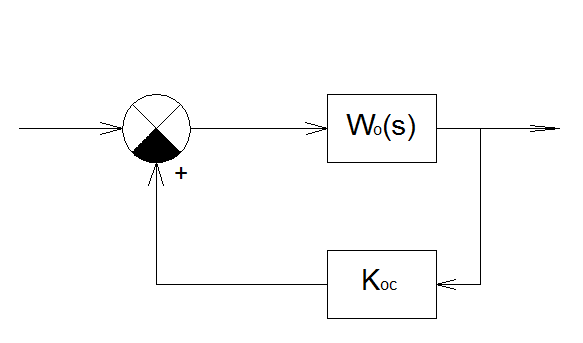
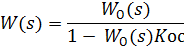

Где 

k можно увеличить за счет Kос. При увеличении Кос увеличивается инерционность.
Одновременно будет увеличиваться  , следовательно, увеличивается точность.
, следовательно, увеличивается точность.
Если в знаменателе будет «-», то система будет неустойчива.

Достоинства: улучшение точности.
Недостатки: увеличивается инерционность.
► Пример 2
Отрицательная жесткая отрицательная ОС охватывает апериодическое звено.


Где 

В этом случае можно повысить устойчивость системы и увеличить качество переходного процесса.
► Пример 3
Охват интегрирующего звена отрицательной жесткой ОС.


Где 

Опять получается апериодическое звено.
Теряются интегрирующие свойства (стало апериодическое), теряется астатизм.


Используется в следящем приводе для того, чтобы угол поворота был пропорционален управляющему сигналу, т.е. напряжению на якоре двигателя.
► Пример 4
Охват интегрирующего звена инерционной жесткой ОС.


Где 


Недостатки: Пропал астатизм. Система стала 2-го порядка (была 1-го)
Звено 2-го порядка с введением производной.
При большом Кос: 
Тогда улучшается качество и, возможно, устойчивость.
► Пример 5
Гибкая ОС при охвате колебательного звена.

Где 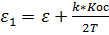
Постоянная времени не изменилась.
Изменился показатель колебательности.
Имеет смысл сделать 
При этом не потеряем точность, быстродействие и качество ПП улучшаются.
Нет смысла охватывать такой связью апериодическое звено, т.к. это приведет к увеличению постоянной времени и инерционности.
► Пример 6
Охват инерционного интегрального звена гибкой ОС.


Где 
В результате получается звено такого же типа, но мы можем уменьшить инерционность и увеличить коэффициент  , тем самым увеличить точность. Является часто используемой.
, тем самым увеличить точность. Является часто используемой.
► Пример 7
Гибкая ОС с инерцией.

Где 

Преимущества:
Интегрирующие свойства остаются (астатизм), но введение производной улучшает качество процесса.


Коэффициент усиления мы устанавливаем сами.
Постоянную времени можем уменьшить (T1 и T2), значит можно уменьшать и увеличить точность.








