 2018-02-13
2018-02-13 1118
1118
На современных машиностроительных предприятиях наряду с системами ЧПУ, системами управления промышленными роботами широко используют логические системы управления (ЛСУ), основой которых являют программируемые контроллеры. Рассмотрим основные причины и необходимость использования ЛСУ в системах группового управления технологическим оборудованием на машиностроительных предприятиях.
В состав промышленного предприятия входят машины, процессы, люди, сырье, готовая продукция, причем все эти компоненты взаимодействуют в соответствии с планами, целями, инструкциями и режимами производства Исполнению этих планов и целей препятствуют некачественное сырье, поломки машин, различные помехи для людей и процессов, бракованная продукция и прочие неисправности. Производственная система должна учитывать все эти неприятности, принимая соответствующие решения и осуществляя контролирующие воздействия. Кроме анализа этих неприятностей система, принимающая решения, должна задавать обычный и естественный порядок дейстъий: когда необходимо выполнить следующую операцию и какую именно.
Решения, принимаемые на производстве, делят на две большие категории:
-решение по основным признакам;
-решение по значениям переменных.
Если на вопрос можно ответить "да" или "нет", это значит, что он имеет отношение к основным признакам. В этом случае можно решать задачи автоматизации с помощью ЛСУ. При этом промышленные ЛСУ используют непосредственно в случае принятия решения по основным признакам, а также косвенно в случае принятия решений по значениям переменных. Для разработки ЛСУ промышленным оборудованием требуется установить все логические связи между отдельными переменными. Для этого могут использоваться таблицы истинности, булева алгебра.
Таблица истинности - это матрица, устанавливающая связи между всеми возможными комбинациями логических переменных и соответствующими им значениями функций. Для пояснения принципов построения таблицы истинности рассмотрим следующие примеры. Пример 1. Пульт управления с блокировкой. Пусть производственный процесс управляется с пульта (см. рис. 4.2) и необходимо ограничить к нему доступ лиц путем блокировки, ключ к которой имеется только у определенных лиц. Для наибольшей простоты предполагается, что на пульте имеется всего один орган управления: двухпозиционный переключатель (положения ВКЛ/ВЫКЛ), не считая замка блокировки.
Подобный пульт управления представляет собой ЛСУ с переменными дискретного типа, каждая из которых может принимать два и только два значения или состояния. Эти переменные и их состояния определяют так:
- переменная S характеризует положение переключателя: S=1, переключатель в положении ВКЛ; S=0 - в положении ВЫКЛ;
- переменная L характеризует состояние блокировки: L=0, если ключ отсутствует (блокировка включена), L=1, если ключ присутствует (блокировка снята);
-переменная р отражает состояние процесса: р =0 - процесс остановлен; p = 1 - процесс действует. Цифры 0 и 1 используют для представления двух состояний логических переменных, т. е. 0 - истина, 1 - ложь (0 - ВКЛ, 1 - ВЫКЛ и т.д.). После определения переменных все их вероятностные комбинации сводятся в таблицу истинности (см. табл. 4.1).
Входные переменные располагаются столбцами в левой части матрицы, а выходные в правой.
В данном примере переменная р одновременно является как входной, так и выходной. В этом есть свой смысл, так как если ключ не вставлен в замок, то хотим, чтобы процесс оставался остановленным, если он уже был остановлен, или продолжал функционировать, если он действовал и до этого, каким бы не было положение переключателя ВКЛ/ВЫКЛ. Иначе говоря, текущее состояние процесса р (вход) может оказывать влияние на его будущее состояние (выход).
Таблица истинности читается построчно. Например. Первая строка: если переключатель находится в положении ВЫКЛ (S=0), если блокировка включена (L = 0) и если процесс остановлен (р = 0), то процесс должен оставаться остановленным, т.е. рвых= 0. Седьмая строка: если переключатель находится в положении ВКЛ (S=l), если блокировка снята (L = 1) и если процесс остановлен (р = 0), то он должен начать действовать, т.е. pBbIX=1 - Аналогично интерпретируются и другие строки.

В общем случае таблицы истинности могут содержать любое число входных и выходных переменных, при этом каждая строка интерпретируется следующим образом:
ЕСЛИ (вход1) и ЕСЛИ (вход2) и... и ЕСЛИ (входn) ТО (выход1 и (выход2) и... и (выходm) где п - число входных переменных; т - число выходных переменных.
Во избежание недоразумений значения входных переменных целесообразно рассматривать как имеющие место в момент времени, предшествующий соответствующим выходным переменным в той же самой строке таблицы истинности.
Последовательность строк (или столбцов) в таблице истинности является совершенно произвольной. Иногда бывает полезно придерживаться естественной последовательности, характеризующей цепочку переходов системы из одного состояния в другое в процессе ее работы. Но подобная стратегия имеет один недостаток: легко проглядеть необычные состояния, в которых может оказаться система.
Другая стратегия основана на использовании упорядоченной последовательности, исчерпывающей все возможные состояния входных переменных, как в табл. 4.1. Поскольку каждая переменная может принимать только значения 0 или 1, очень удобно изображать каждую комбинацию входных переменных как число в двоичной системе счисления. При такой стратегии таблица истинности всегда начинается со строки, состоящей из нулей, и заканчивается строкой, состоящей из единиц.
Большинство станков на производстве включается и выключается с помощью кнопочных выключателей, причем пуск и останов производят различными кнопками, как показано на рис. 4.3. Это оправдано соображениями безопасности, т.к. кнопке СТОП можно дать преимущественное право остановки станка в экстренных случаях независимо от положения кнопки ПУСК.
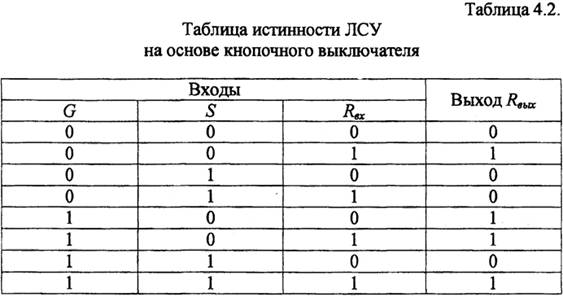
Кнопочный выключатель работает следующим образом. Кнопка ПУСК включает систему и последняя работает до тех пор, пока не будет нажата кнопка СТОП. Кнопка СТОП имеет приоритет над кнопкой ПУСК. Рассмотрим входные и выходные переменные, характеризующие логику работы кнопочного выключателя:
-переменная G характеризует положение кнопки ПУСК; G=1 кнопка нажата; G=O кнопка отжата.
-переменная S характеризует положение кнопки СТОП: S=1 кнопка нажата; S=0 кнопка отжата.
-переменная R характеризует состояние станка: R=0 - станок не работает; R=1 - станок работает.
Таблица истинности ЛСУ на основе кнопочного выключателя приведена в табл. 4.2.
Наряду с таблицами истинности для разработки ЛСУ широко используют алгебраические выражения, получаемые по правилам булевой алгебры.
Основными операторами булевой алгебры являются И, ИЛИ и НЕ, которые используют для образования любых булевых логических выражений. При интерпретации булевых логических выражений каждый множитель представляется как необходимое условие, а каждое слагаемое как допустимая альтернатива для получения результатов.
Например, выражение
Y = A·B (4.1)
говорит о том, что выходная переменная Y истинна, когда истинны обе входные переменные А и В.
Выражение
Y = (A·B) + C (4.2)
создает альтернативу, т.е. Y - истинна, если истинна С либо А • В. Оператор НЕ изменяет значение булевого выражения на обратное.
Булева алгебра позволяет не только записывать логические выражения, но и приводить их к наиболее простому виду.
Законы и теоремы булевой алгебры, наиболее часто используемые при решении практических задач логического управления, приведены в табл. 4.3. Булево выражение для примера 1, т.е. для таблицы истинности 4.1, записывается в виде

или

С учетом табл. 4.3 выражение (4.4) приводится к упрощенному виду с использованием закона дистрибутивности:

т.е. позволяет упрощать булевы выражения.

Промышленные ЛСУ удобнее изображать, проектировать и исследовать/, пользуясь некоторыми графическими методами. Графическая интерпретация особенно необходима для сложных ЛСУ, что характерно для большинства прикладных задач автоматизации производства. Подобное упрощение открывает прямой путь к повышению надежности и экономичности промышленных ЛСУ. Наличие в реальных системах управления таймеров, запоминающих устройств, счетчиков, элементов задержки затрудняет описание их только с помощью булевых выражений. Поэтому при проектировании ЛСУ используют:
-логические схемы, составляемые из логических элементов НЕ, И, ИЛИ;
-временные диаграммы, показывающие переход входных переменных из одного состояния в другое и отражающие эти изменения на состояниях выходных переменных;
-лестничные логические схемы, в которых оператор И интерпретируется как последовательное соединение, а ИЛИ - как параллельное соединение элементов (контактов). Эта способы описания промышленных ЛСУ приведены в работе [13].

