 2015-01-21
2015-01-21 13169
13169Рассмотрим свободные затухающие колебания — колебания, амплитуда которых из-за потерь энергии реальной колебательной системой с течением времени уменьшается. Простейшим механизмом уменьшения энергии колебаний является ее превращение в теплоту вследствие трения в механических колебательных системах, а также омических потерь и излучения электромагнитной энергии в электрических колебательных системах.
Закон затухающих колебаний определяется свойствами колебательных систем. Обычно рассматривают линейные системы — идеализированные реальные системы, в которых параметры, определяющие физические свойства системы, в ходе процесса не изменяются. Линейными системами являются, например, пружинный маятник при малых растяжениях пружины (когда справедлив закон Гука), колебательный контур, индуктивность, емкость и сопротивление которого не зависят ни от тока в контуре, ни от напряжения. Различные по своей природе линейные системы описываются идентичными линейными дифференциальными уравнениями, что пзволяет подходить к изучению колебаний различной физической природы с единой точки зрения, а также проводить их моделирование, в том числе и на ЭВМ.
Дифференциальное уравнение свободных затухающих колебаний линейной системы задается в виде
 (146.1)
(146.1)
где s — колеблющаяся величина, описывающая тот или иной физический процесс,  = const — коэффициент затухания,
= const — коэффициент затухания,  — циклическая частота свободных незатухающих колебаний той же колебательной системы, т. е. при = 0 (при отсутствии потерь энергии) называется собственной частотой колебательной системы.
— циклическая частота свободных незатухающих колебаний той же колебательной системы, т. е. при = 0 (при отсутствии потерь энергии) называется собственной частотой колебательной системы.
Решение уравнения (146.1) рассмотрим в виде
 (146.2)
(146.2)
где u = u (t). После нахождения первой и второй производных выражения (146.2) и подстановки их в (146.1) получим
 (146.3)
(146.3)
Решение уравнения (146.3) зависит от знака коэффициента перед искомой величиной. Рассмотрим случай, когда этот коэффициент положителен:
 (146.4)
(146.4)
(если ( ) > 0, то такое обозначение мы вправе сделать). Тогда получим уравнение типа (142.1)
) > 0, то такое обозначение мы вправе сделать). Тогда получим уравнение типа (142.1)
решением которого является функция

(см. (140.1)).
Таким образом, решение уравнения (146.1) в случае малых затуханий ( <<
<<  )
)
 (146.5)
(146.5)
где  – начальная амплитуда колебаний, а
– начальная амплитуда колебаний, а
 (146.6)
(146.6)
— амплитуда затухающих колебаний.
Зависимость (146.5) показана на рис.208 сплошной линией, а зависимость (146.6) — штриховыми линиями. Промежуток времени  в течение которого амплитуда затухающих колебаний уменьшается в е раз, называется временем релаксации.
в течение которого амплитуда затухающих колебаний уменьшается в е раз, называется временем релаксации.
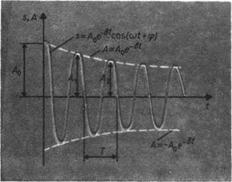
Рис. 208
Затухание нарушает периодичность колебаний, поэтому затухающие колебания не являются периодическими и, строго говоря, к ним неприменимо понятие периода или частоты. Однако если затухание мало, то можно условно пользоваться понятием периода как промежутка времени между двумя последующими максимумами (или минимумами) колеблющейся физической величины (рис. 208). Тогда период затухающих колебаний с учетом формулы (146.4) равен

Если A (t) и A (t + T) — амплитуды двух последовательных колебаний, соответствующих моментам времени, отличающимся на период, то отношение
называется декрементом затухания, а его логарифм
 (146.7)
(146.7)
— логарифмическим декрементом затухания; N e — число колебаний, совершаемых за время уменьшения амплитуды в е раз. Логарифмический декремент затухания — постоянная для данной колебательной системы величина.
Для характеристики колебательной системы пользуются понятием добротности Q, которая при малых значениях логарифмического декремента равна
 (146.8)
(146.8)
(так как затухание невелико ( << ), то Т принято равным Т о).
Из формулы (146.8) следует, что добротность пропорциональна числу колебаний N e, совершаемых системой за время релаксации.
Применим выводы, полученные для свободных затухающих колебаний линейных систем, для колебаний различной физической природы — механических (в качестве примера рассмотрим пружинный маятник) и электромагнитных (в качестве примера рассмотрим электрический колебательный контур).
1. Свободные затухающие колебания пружинного маятника. Для пружинного маятника (см. § 142) массой m, совершающего малые колебания под действием упругой силы F = – kx, сила трения пропорциональна скорости, т. е.
где r — коэффициент сопротивления; знак минус указывает на противоположные направления силы трения и скорости.
При данных условиях закон движения маятника будет иметь вид
 (146.9)
(146.9)
Используя формулу  (см. (142.2)) и принимая, что коэффициент затухания
(см. (142.2)) и принимая, что коэффициент затухания
 (146.10)
(146.10)
получим идентичное уравнению (146.1) дифференциальное уравнение затухающих колебаний маятника:

Из выражений (146.1) и (146.5) вытекает, что маятник колеблется по закону

c частотой (см. (146.4)).
Добротность пружинного маятника, согласно (146.8) и (146.10),  .
.

