 2015-02-04
2015-02-04 1073
1073XXVI. п.1. Графы. Основные определения
Рассмотрим некоторое конечное множество точек V = { v 1, v 2,…, vn } и конечное множество линий Х, соединяющих некоторые пары из точек множества V. Полученная совокупность точек и линий называется графом и обозначается G = { V, X }.
Элементы множества V называются вершинами графа, а элементы множества Х – ребрами.
Граф можно изобразить при помощи геометрической конфигурации. Вершины обозначаются точками (кружочками), а ребра – линиями, соединяющими соответствующие вершины (рис. 4). При этом несущественным является расположение вершин, форма и длина ребер графа, важно лишь, соединены две данные точки ребром, или нет.
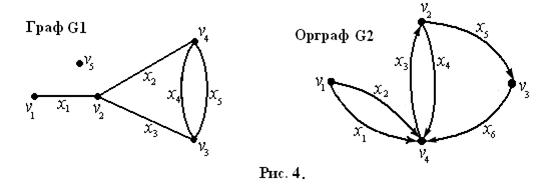 Ребра, соединяющие одну и ту же пару вершин, называются кратными (или параллельными) ребрами (ребра х 4, х 5 графа G 1 на рис. 4).
Ребра, соединяющие одну и ту же пару вершин, называются кратными (или параллельными) ребрами (ребра х 4, х 5 графа G 1 на рис. 4).
Если х – ребро графа, соединяющее вершины vi, vj, то вершины vi и vj называются концами ребра х.
Множество ребер графа Х можно задать, как множество пар вершин из множества V. Если пары в этом множестве Х являются упорядоченными, то граф называется ориентированным или орграфом. Ребра орграфа называют дугами и на рисунках помечают стрелками (рис. 4).
Если х = (vi, vj) – дуга орграфа, то вершина vi называется началом дуги х, а вершина vj – концом дуги х.
При помощи графов удобно изображать связь атомов в молекуле, кристаллические решетки, схемы дорог, маршруты движения, электрические цепи, экономические связи объектов, графики работ и др.
XXVII. п.2. Матрицы графов
Для того, чтобы задать граф, необходимо задать множества его вершин и ребер(V и X). Иногда граф задают списком ребер (дуг), например, орграф G2, изображенный на рис. 4, можно задать следующим списком дуг:
X = { х 1, х 2, х 3, х 4, х 5, х 6} = {(v 1, v 4), (v 1, v 4), (v 4, v 2), (v 2, v 4), (v 2, v 3), (v 3, v 4)}.
В этом списке каждой из 6-ти дуг орграфа соответствует упорядоченная пара вершин (если граф неориентированный, то порядок записи вершин в каждой паре – произвольный).
Если граф содержит изолированные вершины, т.е. не связанные ни с одной другой вершиной ребрами (дугами) графа (см. вершину v 5 в графе G1 на рис. 4), то список ребер не даст полного представления о графе. Кроме того, использовать список ребер (дуг) можно только при относительно небольшом количестве вершин графа. Для практического использования более удобен матричный способ задания графов.
Пусть G = { V, X } – граф, где V = { v 1, v 2,…, vn }, X = { x 1, …, xm }.
Если вершины графа vi, vj являются концами ребра х, то говорят, что вершины vi, vj и ребро х инцидентны.
Матрицей инцидентности графа G называется матрица размерности n ´ m B (G), элементы которой
bij = 
Строки матрицы инцидентности графа соответствуют его вершинам, а столбцы – ребрам.
Для орграфа вершина vi идуга хj инцидентны, если vi является началом или концом дуги хj. Элементы матрицы инцидентности орграфа определяются по формулам:
bij =  (1)
(1)
Вершины vi, vj графа G называются смежными, если существует ребро х = (vi, vj)Î X, инцидентное этим вершинам (соединяющее эти вершины).
Матрицей смежности графа G называется квадратная матрица A (G) порядка п, каждый элемент которой aij равен количеству ребер, инцидентных вершинам vi и vj.
Для орграфа G = { V, X } элементы матрицы смежности определяются по формулам:
aij =  (2)
(2)
Пример. Записать матрицу инцидентности и матрицу смежности для орграфа G2, изображенного на рис. 4.
Решение. Данный граф является ориентированным. Для построения матрицы инцидентности составим таблицу, используя формулы (1). Заполняем таблицу по столбцам, соответствующим дугам орграфа: в j- м столбце ставим в i -й строке
«–1», если вершина vi является началом дуги хj,
«1», если вершина vi является концом дуги хj,
«0» в остальных случаях (вершина vi и дуга хj неинцидентны).
| x 1 | x 2 | x 3 | x 4 | x 5 | x 6 | Получили матрицу инцидентности: В (G 2) =  . . | |
| v 1 | –1 | –1 | |||||
| v 2 | –1 | –1 | |||||
| v 3 | –1 | ||||||
| v 4 | –1 |
Для построения матрицы смежности составим таблицу, используя формулы (2). Так как граф G 2 ориентированный, то элемент матрицы aij равен количеству ребер с началом в i -й вершине, а концом в j -й вершине.
| v 1 | v 2 | v 3 | v 4 | Получили матрицу смежности A (G 2) =  | |
| v 1 | |||||
| v 2 | |||||
| v 3 | |||||
| v 4 |
Матрица инцидентности более информативна, чем матрица смежности, т.к. по ней можно восстановить не только нумерацию вершин и связи между ними, но и нумерацию ребер. Однако, при помощи матрицы инцидентности задают только графы, не имеющие изолированных вершин (в матрице смежности изолированной вершине соответствуют нулевая строка и нулевой столбец).
Кроме матриц инцидентности и смежности существуют и другие формы матричного задания графов. Матричный метод задания графов удобен для обработки данных на ЭВМ.
XXVIII. п.3. Математическая модель системы управления
Система управления состоит из управляющего устройства (УУ) и объекта управления (ОУ). Примерами систем управления служат семейный бюджет, экономика отрасли, технологический процесс, научное исследование и т.д.
УУ передает в ОУ сигнал – управление. Управление может быть механическим воздействием, электромагнитным импульсом, потоком инвестиций и др. Под воздействием сигнала u (t), где t – время, u (t) – скалярная или векторная функция, система изменяет свое состояние (возможна обратная связь). Простейшая математическая модель системы управления без учета внешних воздействий включает:
• модель ОУ – оператор, в соответствии с которым осуществляется преобразование входа – управления u (t) в реакцию системы;
• алгоритм управления, который зависит от цели управления и наличия обратной связи.
В общем случае состояние динамической системы управления характеризуется n -мерным вектором (матрицей-столбцом)
 ,
,
где xj (t) для j = 1,2,…, n называют фазовыми координатами, а  – фазовым вектором.
– фазовым вектором.
Например, положение самолета определяет 6-мерный вектор, в котором 3 координаты задают положение центра масс самолета в пространстве и 3 координаты – его вращение относительно центра масс. Курс самолета – это вектор-функция  .
.
Модель ОУ обычно описывается уравнениями состояний, отражающих законы физики, экономики и прочее. Довольно часто процесс управления без учета внешних воздействий может быть задан системой обыкновенных дифференциальных уравнений:
 (8)
(8)
или, в векторной форме:  , где
, где  – вектор-функция, характеризующая изменение состояния системы, u (t) – функция управления. В реальных условиях множество управлений ограничено:
– вектор-функция, характеризующая изменение состояния системы, u (t) – функция управления. В реальных условиях множество управлений ограничено:  , где U – класс допустимых управлений.
, где U – класс допустимых управлений.
Для того, чтобы процесс управления был определен на некотором промежутке  , необходимо задать начальное состояние системы – вектор
, необходимо задать начальное состояние системы – вектор  . Тогда
. Тогда  будет соответствовать траектория – вектор-функция , переводящая систему из состояния в
будет соответствовать траектория – вектор-функция , переводящая систему из состояния в  – состояние, достижимое из состояния на данном классе управлений U.
– состояние, достижимое из состояния на данном классе управлений U.
XXIX. 5.2. Оптимальное управление динамической системой
Рассмотрим некоторый процесс управления без учета внешних воздействий, заданный системой обыкновенных дифференциальных уравнений  , где
, где  – заданная вектор-функция, u (t) – функция управления из некоторого класса допустимых управлений U, и соответствует фазовый вектор
– заданная вектор-функция, u (t) – функция управления из некоторого класса допустимых управлений U, и соответствует фазовый вектор  (траектория).
(траектория).
Если определена цель управления, то имеет смысл искать наилучшее (оптимальное) управление для достижения этой цели. В большинстве случаев цель управления можно задать в форме вариационной задачи – поиска экстремума некоторого функционала I [ u (t)] на классе допустимых управлений U. Тогда задача оптимального управления: найти оптимальное управление u *(t) и соответствующую ему оптимальную траекторию  , для которых
, для которых
 (другая форма записи:
(другая форма записи:  ),
),
или  (
( ).
).
Функционал I [ u ] называется критерием качества управления. Например, в так называемой «задаче Лагранжа» роль критерия качества выполняет интегральный функционал вида
 (9)
(9)
где  – заданная функция.
– заданная функция.
XXX. 5.3. Принцип максимума Понтрягина
Рассмотрим простейшую задачу управления: задана модель системы управления  , где , – непрерывная вектор-функция,
, где , – непрерывная вектор-функция,  – функция управления, и критерий качества управления
– функция управления, и критерий качества управления
 .
.
Пусть каждому управлению соответствует траектория  , переводящая систему из состояния
, переводящая систему из состояния  в
в  , где и фиксированы.
, где и фиксированы.
Требуется найти оптимальное управление u *(t) и соответствующую ему оптимальную траекторию  , для которых
, для которых  . Это задача Лагранжа с фиксированным временем и закрепленными концами траекторий:
. Это задача Лагранжа с фиксированным временем и закрепленными концами траекторий:  ,
,  .
.
Допустим, существует оптимальное управление  и соответствующая ему оптимальная траектория , удовлетворяющие условиям задачи.
и соответствующая ему оптимальная траектория , удовлетворяющие условиям задачи.
Введем вспомогательную вектор-функцию  , где
, где  – неизвестные функции, кусочно-непрерывные на
– неизвестные функции, кусочно-непрерывные на  , и построим функцию Гамильтона-Понтрягина (гамильтониан):
, и построим функцию Гамильтона-Понтрягина (гамильтониан):

 . (10)
. (10)
Очевидно, что  .
.
При фиксированных  гамильтониан является функцией управления. Можно доказать, что если u *(t) – оптимальное управление, то при u = u *(t) гамильтониан достигает максимума по управлению и выполняются условия
гамильтониан является функцией управления. Можно доказать, что если u *(t) – оптимальное управление, то при u = u *(t) гамильтониан достигает максимума по управлению и выполняются условия
Принцип максимума Понтрягина.
Если – оптимальное управление, переводящее систему из состояния в и – соответствующая ему оптимальная траектория, которая в первый раз достигает точки в момент t 1, то
1) существует вектор  , соответствующий u *(t) и , причем и являются решениями системы дифференциальных уравнений
, соответствующий u *(t) и , причем и являются решениями системы дифференциальных уравнений
 (11)
(11)
удовлетворяющими условиям
 ,
,  ; (12)
; (12)
2) в каждой точке непрерывности функции u *(t) достигается максимум гамильтониана по управлению:
 . (13)
. (13)
Система (11) называется канонической системой задачи оптимального управления. Для получения ее частного решения (определения констант интегрирования) используют граничные условия (12).
Принцип максимума представляет собой необходимое условие оптимальности. Если получается несколько управлений, удовлетворяющих условиям (11)-(13), то проверяют выполнение достаточных условий, или выбирают одно из них, исходя из смысла задачи.
Идея принципа максимума: чтобы найти u *(t) – оптимальное управление, минимизирующее функционал I [ u (t)], нужно найти управление, максимизирующее гамильтониан:  .
.
[1] Понятия “элементарное событие” и “происходит” являются первоначальными неопределяемыми понятиями, подобно геометрическим понятиям “точка” и “лежит”. При общих рассуждениях полезно иметь в виду какой-либо простой конкретный эксперимент типа общепонятного бросания монеты, игральной кости, извлечения карты из колоды и т.п.
[2] Построение интервальных вариационных рядов целесообразно не только при непрерывной вариации признака, но и если дискретная вариация проявляется в широких пределах, т.е. число вариантов дискретного признака достаточно велико.








