 2015-04-12
2015-04-12 2741
27418. Управление каким-либо объектом или процессом есть целенаправленное воздействие на него в целях установления требуемых состояний объекта, изменения его состояния в требуемом направлении или удержания в заданном постоянном состоянии. Управление должно обеспечивать целевое протекание технологических процессов преобразования энергии, вещества и информации, поддержание оптимальной работоспособности и безаварийности функционирования объекта путем сбора и обработки информации о состоянии объекта и внешней среды, выработки решений о воздействии на объект и их исполнении. В качестве объекта управления может служить самолет, станок, электродвигатель и т.п. Управление объектом с помощью технических средств без участия человека называется автоматическим управлением. Совокупность объекта управления и средств автоматического управления называется системой автоматического управления (САУ).
9. 2.1. Фундаментальные принципы управления [7]
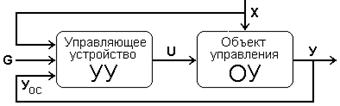
10. Система управления состоит из двух основных частей: объекта управления (ОУ) и устройства управления (УУ), которое называют также регулятором (Р). Регулятор на основании одного или нескольких задающих воздействий, определяющих закон (алгоритм) управления, вырабатывает управляющее воздействие U(t) на ОУ и поддерживает на заданном уровне или изменяет по определенному закону состояние Y(t), которое может отображаться на его выходе соответствующим сигналом y(t). Перед регулятором ставится задача обеспечения заданного качества работы системы во всех практически важных режимах, в том числе при воздействии на объект внешних возмущающих воздействий и дестабилизирующих факторов X(t). Регулятор создаётся разработчиком системы, исходя из знаний о свойствах объекта управления и требуемых задачах системы.
11.  12. Рис.2.1.1. Система управления. 12. Рис.2.1.1. Система управления. |
13. Внешние связи объекта управления показаны на рис. 2.1.1, где Х – канал воздействия среды на объект и управляющее устройство, Y – канал воздействия объекта на среду или информационный канал состояния объекта, U – канал воздействия управления на объект, G – задающее устройство (программатор) изменения управляющего воздействия.
14. Основной задачей управления является поддержание определенного закона изменения одной или нескольких физических величин процессов, протекающих в ОУ. Эти величины называются управляемыми (температура, давление, уровень жидкости, направление перемещения инструмента, и т.п.).
15. В составе объекта управления всегда содержится управляющий орган (УО) объекта, с помощью которого можно изменять параметры состояния ОУ (реостат, вентиль, заслонка и т.п.). Физическую величину U(t) на входе управляющего органа называют входной величиной ОУ или управляющим воздействием.
16. В состав ОУ обычно входит также чувствительный элемент (ЧЭ), который преобразует управляемую величину в пропорциональную ей величину, удобную для информации и использования в системе управления. Физическую величину y(t) на выходе ЧЭ называют выходной величиной ОУ. Как правило, это электрический сигнал (ток, напряжение) или механическое перемещение. В качестве ЧЭ могут использоваться термопары, тахометры, рычаги, датчики давления, положения и т.п.
17. Управляющее воздействие U(t) формируется устройством управления (УУ) и прикладывается к управляющему органу объекта с целью поддержания требуемых значений управляемой величины. Оно создается исполнительным элементом УУ, в качестве которого могут использоваться электрические или поршневые двигатели, мембраны, электромагниты и т.п.
18. В составе системы управления, как правило, имеется также задающее устройство (ЗУ). Оно задает программу изменения управляющего воздействия, то есть формирует задающий сигнал u(t). ЗУ может быть выполнено в виде отдельного устройства с формированием воздействия (сигнала) G(t) на вход УУ, может быть встроенным в УУ или вообще отсутствовать. В качестве ЗУ может выступать кулачковый механизм, магнитофонная лента, маятник в часах, и т.п.
19. Величина X(t), воздействующая на ОУ и (при необходимости) на УУ, называется возмущением. Она отражает влияние на выходную величину y(t) изменений окружающей среды, нагрузки и т.п.
20. В общем случае все связи в системе управления могут быть многоканальными (многомерными) любой физической природы (электрические, магнитные, механические, оптические и пр.).
21. Принципы управления. Различают три фундаментальных принципа управления состоянием ОУ: принцип разомкнутого управления, принцип компенсации, принцип обратной связи.
22. Принцип разомкнутого управления состоит в том, что программа управления жестко задана в ЗУ или внешним воздействием G(t), и управление не учитывает влияние возмущений на параметры процесса. Примеры систем - часы, магнитофон, и т.п.
23. Принцип компенсации применяется для нейтрализации известных возмущающих воздействий, если они могут искажать состояние объекта управления до недопустимых пределов. При априорно известной связи состояния объекта с возмущающим воздействием значение сигнала u(t) корректируются обратно пропорционально возмущающему воздействию x(t). Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. Достоинство принципа компенсации - быстрота реакции на возмущения. Недостаток - невозможность учета подобным образом всех возможных возмущений.
24. Принцип обратной связи получил наибольшее распространение в технических системах управления, при этом управляющее воздействие корректируется в зависимости от выходной величины y(t). Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Связь выхода ОУ с входом управляющего устройства, выполняющего коррекцию сигнала u(t), называется главной обратной связью (ОС).
25. Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов - быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
26. Виды систем управления. В зависимости от принципа и закона функционирования управляющего устройства различают основные виды систем: системы стабилизации, программные, следящие и самонастраивающиеся системы, среди которых можно выделить экстремальные, оптимальные и адаптивные системы.
27. Системы стабилизации обеспечивают неизменное значение управляемой величины при всех видах возмущений, т.е. y(t) = const. В устройстве управления формируется эталонный сигнал, с которым сравнивается выходная величина. УУ, как правило, допускает настройку эталонного сигнала, что позволяет менять по желанию значение выходной величины.
28. Программные системы обеспечивают изменение управляемой величины в соответствии с программой, задаваемой на входе УУ или формируемой ЗУ. К этому виду систем можно отнести магнитофоны, проигрыватели, станки с ЧПУ, и т.п. Различают системы с временной программой, обеспечивающие y = f(t), и системы с пространственной программой, в которых y = f(x), применяемые там, где на выходе систем важно получить требуемую траекторию в пространстве, например, в автомате сверления отверстий в печатных платах.
29. Следящие системы отличаются от программных лишь тем, что программа y = f(t) или y = f(x) заранее неизвестна. В качестве УУ выступает устройство, следящее за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменения выходной величины y(t).
30. Все три рассмотренных вида систем могут быть построены по любому из трех принципов управления (разомкнутого управления, компенсации, обратной связи). Для них характерно требование совпадения выходной величины (состояния системы) с некоторым предписанным значением, которое в любой момент времени определено однозначно.
31. Самонастраивающиеся системы отличаются активным УУ, определяющим такое значение управляемой величины, которое в каком-то смысле является оптимальным.
32. Так, в экстремальных системах требуется, чтобы выходная величина всегда принимала экстремальное значение из всех возможных, которое заранее не определено и может изменяться. Для его поиска система выполняет небольшие пробные движения и анализирует реакцию выходной величины на эти пробы, после чего вырабатывается управляющее воздействие, приближающее выходную величину к экстремальному значению. Процесс идет непрерывно и выполняется только с использованием обратной связи.
33. Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило, сложная обработка информации о характере изменения выходных величин и возмущений, о характере влияния управляющих воздействий на выходные величины, может быть задействована теоретическая информация, информация эвристического характера и т.п. Поэтому основным отличием экстремальных систем является наличие ЭВМ. Эти системы могут работать в соответствии с любым из трех фундаментальных принципов управления.
34. В адаптивных системах предусмотрена возможность автоматической перенастройки параметров или изменения принципиальной схемы систем управления с целью приспособления к изменяющимся внешним условиям. В соответствии с этим различают самонастраивающиеся и самоорганизующиеся адаптивные системы.
2.3. ДИНАМИЧЕСКИЙ РЕЖИМ СИСТЕМ [7, 8, 9, 14].
Обычно на управляемый процесс действуют различные возмущения, отклоняющие управляемый параметр от заданной величины. Установившийся режим является не более чем частным случаем состояния системы на определенных временных интервалах ее работы. Процесс установления требуемого значения управляемой величины называется регулированием, и, ввиду инерционности звеньев регулирования, развивается во времени.
 Рис. 2.3.1. Рис. 2.3.1. |
Динамическим называется режим работы системы, при котором входная и выходная величины системы изменяются во времени. Как правило, динамический режим возникает в результате перехода системы от одного установившегося состояния к другому, и поэтому его часто называют переходным режимом, а процесс перехода от одного установившегося состояния к другому - переходным процессом. Типичный пример переходных процессов для статических и астатических систем приведен на рис. 2.3.1.
Динамический режим, характеризующийся протеканием в ней определенных переходных процессов, является основным режимом работы систем. Зависимость выходной величины от изменяющейся во времени входной величины называют динамической характеристикой системы.
Все динамические характеристики можно разделить на две группы.
К первой группе относятся зависимости выходной величины системы от времени, если входная величина изменяется по типовому закону (импульсный, линейный и т.п.). Это так называемые временные характеристики.
Вторую группу динамических характеристик составляют частотные характеристики. К ним относятся зависимости выходной величины или ее параметров от частоты входной величины, изменяющейся по гармоническому закону.
Переходные процессы в системе. Зависимость выходной величины системы от времени, если входная величина изменилась на единый скачок, называют переходной характеристикой.
 Рис. 2.3.2. Рис. 2.3.2. |
Допустим, система находится в установившемся режиме, и имеет значение выходной величины y = y0. Пусть в момент t = 0 на объект воздействовал какой-либо управляющий или возмущающий фактор x(t), отклонив значение регулируемой величины от номинальной. Через некоторое время регулятор вернет систему к первоначальному состоянию (с учетом статистической ошибки). Если этот переходной процесс происходит по апериодическому временному закону (как на рис. 2.3.1), то процесс регулирования называется апериодическим. При резких возмущениях в системах возможен колебательный затухающий процесс (рис. 2.3.2), а в неустойчивых системах - возникновение незатухающих колебаний и расходящийся колебательный процесс.
Таким образом, переходная характеристика - это реакция элемента системы на ступенчатое изменение входной величины, как правило, единичное x(t) = 1(t). Под входной величиной понимается любой из управляющих или возмущающих воздействий, в многомерных или многоканальных системах – одно из воздействий. Переходная характеристика может быть задана таблично, графически или аналитически в виде системы уравнений {x = 1(t), y = F(t)}.
Оценки переходных характеристик производятся с помощью следующих показателей:
∎ Характер временной зависимости. По характеру зависимости переходные характеристики делятся на монотонные и колебательные. Переходная характеристика считается монотонной, если она имеет не более одного экстремума. В противном случае переходную характеристику относят к колебательной (немонотонной).
∎ Время переходного процесса – это время, в течение которого выходная величина после начала изменения входной достигает нового установившегося значения. Теоретически это время стремиться к бесконечности, поэтому за время переходного процесса принимают время, за которое выходная величина достигает нового установившегося значения с заданной степенью точности tпп, обычно порядка 3-5% от нового установившегося значения. Нетрудно заметить (рис. 2.3.2). что степень точности D соответствует статической ошибке регулирования.
∎ Динамическая ошибка - это разность между действительным значением выходной величины yi в данный момент (ti) и её новым установившемся значением y0, т.е
Dy(t) = y(t) – y0. (2.2.1)
Динамическая ошибка представляет собой функцию времени. Максимальную положительную относительную ошибку за время переходного процесса называют выбросом. Выброс определяется формулой (см. рис. 2.3.2):
s = (yм – y0) / y0 (2.2.2)
∎ Колебательность - количество полных колебаний за время переходного процесса. Колебательность может характеризоваться частотой или периодом колебаний выходной величины.
Импульсная характеристика является другой не менее распространенной временной характеристикой системы. Её называют импульсной переходной характеристикой или функцией веса и обозначают h(t). Это зависимость выходной величины системы от времени, если входная величина изменилась на единичный идеальный импульс.
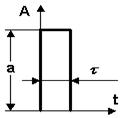 Рис. 2.3.3. Рис. 2.3.3. |
Для получения импульсной характеристики используют импульсы прямоугольной формы (рис. 2.3.3). Такой импульс аналитически определяется выражениями:
A(t) = 0, 0 > t > t;
A(t) = a, 0 ≤ t ≤ t;
 A(t) dt = at.
A(t) dt = at.
 Рис. 2.3.4. Рис. 2.3.4. |
Произведение at часто называют величиной импульса. Если величина импульса равна единице, то импульс называют единичным. Если t → 0, то импульс называет идеальным. Он является теоретической дельта-функцией d(t) с бесконечной амплитудой в точке t=0 и площадью, равной 1.
Импульсная характеристика - это реакция системы на идеальное единичное импульсное изменение входной величины. Она может быть задана аналитически в виде системы уравнений {x = d(t), y = F(t)}. Так как идеальный импульс представляет собой производную скачка, d(t) = d 1(t) / dt, то импульсная характеристика есть производная переходной характеристики системы. Оценка импульсной характеристики производится теми же показателями, что и переходной. Пример характеристики приведен на рис. 2.3.4.

