2015-04-01
2015-04-01 9286
9286Система сил, у которой силы произвольно ориентированы в пространстве, называется пространственной системой сил.
Пусть дана произвольная система сил (F1, F2, …,Fn) (рис. 1.31). Геометрическую сумму этих сил
 (1.19)
(1.19)
называют главным вектором системы сил.
Геометрическую сумму моментов всех сил системы относительно какого-либо полюса (центра приведения):
 , (1.20)
, (1.20)
где  – радиус вектор точки приложения силы
– радиус вектор точки приложения силы  i относительно полюса О
i относительно полюса О
(рис. 1.31), называют главным моментом системы сил относительно этого полюса.
Основная теорема статики гласит, что всякая пространственная система сил в общем случае эквивалентна системе, состоящей из одной силы, приложенной в какой-либо точке (центре приведения) и равной главному вектору данной системы сил, и паре сил, момент которой равен главному моменту системы относительно выбранного центра приведения.
Учитывая, что вектор момента пары сил полностью характеризует данную пару сил и как свободный вектор может быть приложен в любой точке тела, следует, что в общем случае пространственная система сил может быть эквивалентно заменена совокупностью главного вектора и главного момента этой системы сил, приложенных к выбранной точке приведения (рис. 1.32).
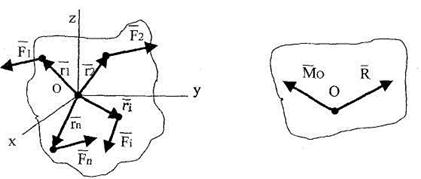
Рис. 1.31 Рис. 1.32
Введем в рассмотрение декартову систему координат, начало которой находится в выбранной точке О. Тогда проекции вектора R на координатные оси найдутся из соотношений:
 ;
;
 ; (1.21)
; (1.21)
 .
.
Модуль силы  равен
равен
 , (1.22)
, (1.22)
а направление определяется направляющими косинусами:
cos  =Rx/R; cos
=Rx/R; cos  = Ry/R; cos
= Ry/R; cos  = Rz/R. (1.23)
= Rz/R. (1.23)
Для проекции вектора  имеем
имеем
 (1.24)
(1.24)
где Mx( i), My( i), Mz( i) – моменты силы i, относительно соответствующих осей координат. Величины Мх, Му, Mz называются главными моментами системы сил относительно координатных осей.
Модуль и направление вектора  о определяются формулами
о определяются формулами
| (1.25) |

cos  = Мx /Мо; cos
= Мx /Мо; cos  = Мy /Мо; cos
= Мy /Мо; cos  = Мz /Мо.
= Мz /Мо.
Для равновесия пространственной системы сил необходимо и достаточно, чтобы главный вектор и главный момент этой системы равнялись нулю:
 = 0,
= 0,  =0, (1.26)
=0, (1.26)
или чтобы равнялись нулю их проекции на координатные оси:
 (1.27)
(1.27)
 .
.
Уравнения равновесия (1.27) пространственной системы сил позволяют определить шесть неизвестных сил из системы пространственных сил, приложенных к абсолютно твердому телу.
При составлении этих уравнений распределенную силу можно заменить равнодействующей (если она существует). Как правило, при решении задач на пространственную систему сил в качестве распределенной силы рассматривается сила тяжести тела. Она заменяется равнодействующей, приложенной в центре тяжести тела (см. п. 1.8 пособия), направленной вертикально вниз и по модулю равной весу тела.
Первые три уравнения (1.27) принято называть уравнениями сил, вторые три – уравнениями моментов. При составлении этих уравнений полезно предварительно изобразить исследуемое тело и приложенные силы в трех проекциях. Это значительно упростит составление уравнений равновесия. Полезно также все силы, не параллельные осям координат, предварительно разложить на составляющие, параллельные этим осям, учитывая, что, согласно теореме Вариньона, момент равнодействующей системы сил относительно оси равен алгебраической сумме моментов сил системы относительно той же оси.
В соответствии со всем ранее изложенным методика решения задач на равновесие тела под действием пространственной системы сил будет иметь вид:
а) выделяется исследуемое тело;
б) на чертеж наносятся активные силы;
в) выбирается система координат;
г) связи мысленно отбрасываются, их действие заменяется реакциями связей;
д) силы, не параллельные выбранным осям координат, можно мысленно разложить на составляющие, параллельные этим осям;
е) желательно тело и приложенные к нему силы изобразить в трех проекциях, параллельных введенным координатным плоскостям;
ж) составляются уравнения равновесия;
з) решая составленные уравнения, находят неизвестные силы.
Примечание. Выбор системы координат, исходя из требования упрощения уравнений моментов, желательно производить не произвольно, а исходя из того, чтобы моменты возможно большего числа неизвестных сил относительно этих координатных осей обращались в нуль. Это происходит, если оси координат проходят через точки закрепления тела. Иногда при решении задачи первым действием вводится система координат, так как относительно ее осей легче задавать как направления активных сил, так и сил реакции связи.
Плоская система сил является частным случаем пространственной системы сил, у которой все силы системы расположены в одной плоскости. Так как для плоской системы сил момент силы и момент пары сил -скалярные величины, главный момент плоской системы сил будет равен алгебраической сумме моментов всех сил системы относительно точки приведения:
 (1.28)
(1.28)
где hi - плечо силы i.
Выберем систему координат Оху в плоскости расположения сил. Тогда проекции всех сил на ось Oz будут равны нулю. Соответственно выражения для определения главного вектора и главного момента примут вид


 (1.29)
(1.29)
 (1.30)
(1.30)
cos  =Rx/R; cos
=Rx/R; cos  = Ry/R. (1.31)
= Ry/R. (1.31)
Для равновесия плоской системы сил необходимо и достаточно, чтобы главный вектор и главный момент этой системы равнялись нулю:

 ,
,  , (1.32)
, (1.32)
или чтобы равнялись нулю проекции главного вектора на координатные оси и главный момент:
(1.33)
Уравнения равновесия плоской системы сил (1.33) позволяют определить три неизвестных силы из плоской системы сил, приложенных к абсолютно твердому телу.
Первые два уравнения (1.33) принято называть уравнениями сил, третье - уравнением моментов. При составлении этих уравнений предварительно полезно все силы, не параллельные осям координат, разложить на составляющие, параллельные этим осям, учитывая, что согласно теореме Вариньона момент равнодействующей плоской системы сил относительно точки равен алгебраической сумме моментов сил системы относительно той же точки.
Необходимо заметить, что уравнение моментов можно составлять не только относительно начала координат, но и относительно любой точки чертежа. Удобно в качестве этой точки выбирать ту, относительно которой моменты возможно большего числа неизвестных сил обращаются в ноль. Это упростит последующее решение уравнения моментов. Как правило, такой точкой является одна из точек закрепления тела.
При постановке задач на исследование плоской системы сил распределенную силу принято изображать геометрической фигурой, заполненной стрелками. Причем, геометрическая фигура характеризует закон изменения интенсивности силы, а направление стрелок -направление силы. Так, если тела взаимодействуют по прямой линии, сила перпендикулярна к линии взаимодействия, а интенсивность равномерная или линейно изменяющаяся, распределенная сила будет изображена в виде
рис. 1.33, 1.34.
Составляя уравнения равновесия плоской системы сил, распределенную силу можно заменить равнодействующей. При распределенной силе постоянной интенсивности q равнодействующая  прикладывается к центру участка приложения распределенной силы (рис. 1.33), направляется параллельно распределенной силе и по модулю равна
прикладывается к центру участка приложения распределенной силы (рис. 1.33), направляется параллельно распределенной силе и по модулю равна
 . (1.34)
. (1.34)
При интенсивности, изменяющейся по линейному закону, максимальное значение которой равно q, равнодействующая прикладывается к точке участка приложения распределенной силы, отстоящей на l/3 от точки этого участка, в которой интенсивность распределенной силы достигает максимума (рис. 1.34), направляется параллельно распределенной силе и по модулю равна
 .
.
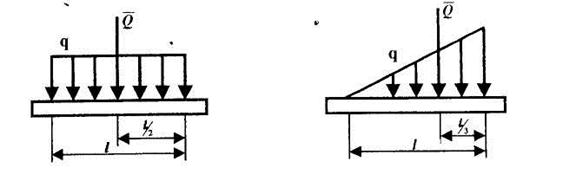
Рис. 1.33 Рис. 1.34
В соответствии со всем ранее изложенным методика решения задач на равновесие тела под действием плоской системы сил будет иметь вид:
а) выделяется исследуемое тело;
б) на чертеж наносятся активные силы, при этом распределенные силы заменяются равнодействующими;
в) выбирается система координат;
г) связи мысленно отбрасываются, их действие заменяются реакциями связей;
д) силы, не параллельные выбранным осям координат, раскладываются на составляющие, параллельные этим осям;
е) составляются уравнения равновесия;
ж) решая составленные уравнения, находят неизвестные силы.
В инженерной практике часто встречаются задачи на нахождение условий равновесия конструкций из систем тел, соединенных связями. Связи, соединяющие части данной конструкции, будем называть внутренними, в отличие от внешних связей, скрепляющих конструкцию с телами, в нее не входящими.
Если после отбрасывания внешних связей конструкция остается жесткой, то для нее задача статики решается как для абсолютно твердого тела. Если же после отбрасывания внешних связей конструкция не сохраняет жесткость, то применяется другой способ решения. Он состоит в том, что конструкцию расчленяют на отдельные тела и составляют условия равновесия для каждого из тел в отдельности. Связи, как внешние, так и внутренние, мысленно отбрасывают, заменяя их действие на тело реакциями связей. При этом, согласно третьему закону Ньютона, реакции внутренних связей будут попарно равны по модулю и противоположны по направлению. Полученные для каждого из тел системы уравнения равновесия решают совместно.
Пример 1.4. Для балки, изображенной на рис. 1.35,а, определить реакции в опорах при действии сил  , и пары сил с моментом М, если F=100H, Р = 200Н, а = 1м, b = 2м, с = 1,5 м, М = 50Hм,
, и пары сил с моментом М, если F=100H, Р = 200Н, а = 1м, b = 2м, с = 1,5 м, М = 50Hм,  = 30 °, β = 60°.
= 30 °, β = 60°.
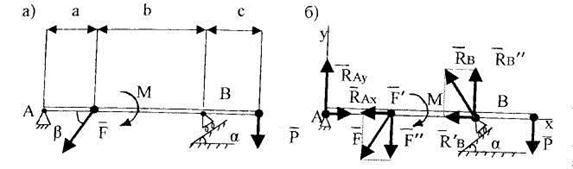
Рис. 1.35
Выберем систему координат Аху.
Мысленно отбросим связи и заменим их действие реакциями связей. В точке А балка имеет неподвижную шарнирную опору. Реакцию в такой опоре можно представить в виде двух взаимно перпендикулярных составляющих, лежащих в плоскости чертежа. В точке В – подвижная шарнирная опора. Сила реакции в ней направлена перпендикулярно плоскости, по которой опора может перемещаться, и также лежит в плоскости чертежа. Нанесем на чертеж силы реакций связей в точках А и В (рис. 1.35,б). Так как все силы системы лежат в одной плоскости, это задача на равновесие твердого тела при действии плоской системы сил.
Разложим силы ,  B на составляющие, параллельные осям координат (рис. 1.35,6). Модули составляющих и B будут равны
B на составляющие, параллельные осям координат (рис. 1.35,6). Модули составляющих и B будут равны
F' = Fcos β, F" = Fsin β, R'B=RB sin , R"B=RBcos . (1.35)
Составим уравнения равновесия. Уравнение моментов будем составлять относительно точки А, так как относительно этой точки моменты неизвестных сил Ax, Ay будут равны нулю (аналогично уравнение моментов можно составлять относительно точки В, в этом случае были бы равны нулю моменты сил B, Ax):
∑Fix= -F'- R'B + RAx = 0;
∑Fiу= RAy -F''+ R''B - P = 0; (1.36)
∑ MA ( )= - M - F''a + R''B (a+b) –P(a+b+c)= 0
)= - M - F''a + R''B (a+b) –P(a+b+c)= 0
С учетом (1.35) эти уравнения примут вид
RAx -Fcos β - RB sin = 0; RAy - Fsin β + RB cos - P = 0 (1.37)

Решая уравнения равновесия, найдем из третьего уравнения (1.37):

Из второго уравнения (1.37):
RAy=P + Fsin β -RB cos = -58,93H.
Из первого уравнения (1.37):
RAx = Fcos β + RB sin = 249,5H.
Пример 1.5. Для жесткой конструкции из балок, изображенной на рис. 1.36,а, определить реакции в опоре при действии сил , , равномерно распределенной нагрузки интенсивностью q и пары сил с моментом М, если F = 100H, Р = 200Н, М=50Н-м, q = 20Н/м, а = 1м,
b = 2м, c = 3м, = 30o
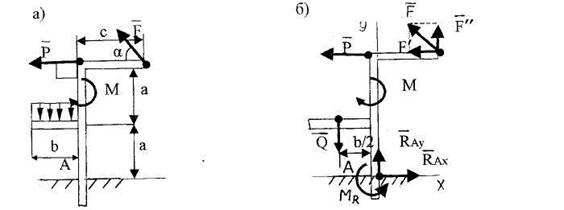
Рис. 1.36
Выберем систему координат Аху.
Мысленно отбросим связи, заменив их действие реакциями связей. Так как конец балки жестко заделан в стену и конструкция находится под действием плоской системы сил, то реакцию связи можно представить состоящей из пары сил с моментом МR и взаимно перпендикулярных сил реакции Ax, Ay расположенных в плоскости чертежа (рис. 1.36,6).
Распределенную нагрузку интенсивности q заменим эквивалентной силой , приложенной в середине участка распределенной нагрузки (рис.1.36,б) и равной по модулю
Разложим силу на составляющие, параллельные осям координат (рис. 1.36,6). Модули составляющих силы будут равны:
F'=Fcos ; F" = Fsin . (1.38)
Составим уравнения равновесия:
∑Fix= -P -F'+ RAx = 0; ∑Fiу= - Q +RAy +F'' = 0; (1.39)
∑ MA ()= M R - M + Qb/2+P2a +F'2a + F"c = 0
C учетом (1.38) эти уравнения примут вид
-P-Fcos + RAx=0; - Q -RAy +Fsin = 0;
(1.40)
MR -M + Qb/2 + P2a +Fa cos + cFsin = 0.
Решая уравнения равновесия, найдем
RAx = P + Fcos = 286,6H; RAy = Q – Fsin =-10H;
MR=M - Q  -P2a-2aFcos
-P2a-2aFcos  -Fcsin = -713,2 Hм.
-Fcsin = -713,2 Hм.
Пример 1.6. Определить реакции в опорах и точке контакта составной балки, изображенной на рис. 1.37,а, если F = 100 Н; Р=200Н;
М = 50Н·м; = 60°; β = 45°; у = 30°; а = 2 м; b = 0,5 м: с = 3 м.
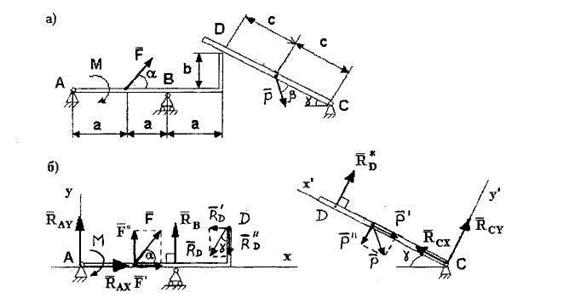
Рис. 1.37
Мысленно отбросим связи и для наглядности рассоединим балки. Выберем системы координат Аху и Сх'у', как показано на рис. 1.37,б.
В точках А и С балки опираются на неподвижные шарнирные опоры, следовательно, силы реакций в этих точках можно представить двумя взаимно перпендикулярными составляющими, лежащими в плоскости чертежа. В точке В имеется подвижная шарнирная опора, в ней сила реакции будет также лежать в плоскости чертежа и будет направлена перпендикулярно направляющей, по которой катятся ее катки.
При определении направления реакций в точке D конец левой половинки балки будем рассматривать как острие, а правую часть балки - как плоскость; реакция в точке контакта острия и плоскости всегда направлена перпендикулярно плоскости (рис. 1.37,6).
Согласно третьему закону И. Ньютона
 =
=  (1.41)
(1.41)
и силы D и  направлены в противоположные стороны, причем D приложена к левой половинке балки, а - к правой.
направлены в противоположные стороны, причем D приложена к левой половинке балки, а - к правой.
Разложим силы , D, , не параллельные координатным осям, на составляющие, параллельные этим осям (рис. 1.37,б). Модули составляющих этих сил будут равны:
F'=Fcos ; F" = F sin ;
P'=Pcos β; P" = Р sin β; (1.42)
R'D = RD sin  ; R"D = RD cos .
; R"D = RD cos .
Составим уравнения равновесия для правой части балки:
∑Fix'= -P' + RCx = 0;
∑Fiу'= - P''+ R''Cy = 0; (1.43)
∑ MC (Fi)= - ·2c +P''c = 0
Составим уравнения равновесия для левой части балки:
∑Fix= RAx +F'- R'D = 0;
∑Fiу= RAy +F''+ RB - R''D = 0; (1.44)
∑ MA ( )= - M - F''·a + RB·2a - R''D ·3a+ R'D ·b= 0
)= - M - F''·a + RB·2a - R''D ·3a+ R'D ·b= 0
С учетом (1.42) и (1.41) уравнения (1.43), (1.44) примут вид
- Р cos β + Rcx=0; RD -P sin β + Rcy=0;
-RD ·2c + cP sin β = 0; (1.45)
RAx + Fcos - RD sinγ =0; RAy+Fsin + RB - RD cosγ =0;
-M + aF sin + RB·2a – 3a RD cosy + bRD sinγ =0.
Решая эти уравнения, найдем:
RD =  sin β = 70,71H; RСx = P cos β = 141,4H;
sin β = 70,71H; RСx = P cos β = 141,4H;
RB = (M – aFsin + 3aRD cos γ - bRD sin γ)/2a = 56,67 H;
RAy = - Fsin γ – RB + RD cos γ = - 45,44 H;
RAx = RDsin γ - Fcos = - 14,6 H; RCy = Psin β – RD = 70,71H;
Пример 1.7. Стремянка длиной l = 3 м, раздвинутая на угол =60°, стоит на гладком полу, образуя равнобедренный треугольник (рис.1.38,а). Части стремянки, соединенные цилиндрическим шарниром В, удерживаются от раздвигания тросом DE, прикрепленным к середине частей стремянки. На расстоянии L =1 м от вершины стремянки стоит человек весом Р =1000 Н, вес каждой части стремянки Q =100 Н. Считая стремянку плоским телом, расположенным в плоскости чертежа, определить давление ее ножек на пол, растягивающее усилие в тросе, реакции в верхнем шарнире.
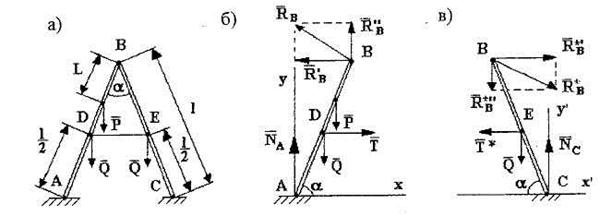
Рис. 1.38
Активными силами в данной задаче будут являться силы веса человека и стремянки. Направим их вертикально вниз, приложив силу веса человека к точке его нахождения на стремянке, а силы веса частей стремянки в их середине (1.38,а).
Мысленно отбросим связи и для наглядности рассоединим балки. Выберем системы координат Аху и Сх'у' (рис. 1.38,б).
Так как поверхность пола по условию задачи идеально гладкая, то силы реакции опор в точках А и С будут направлены вертикально вверх.
Сила реакции в точках D и Е ( и *) будут направлены по тросу к его
и *) будут направлены по тросу к его
центру и равны по модулю: Т = Т*. В точке В стремянка соединена цилиндрическим шарниром, поэтому направление силы реакции связи точно указать невозможно, известно только, что она лежит в плоскости чертежа. Обозначим силу, действующую в шарнире на левую часть стремянки, B, тогда сила  , действующая на правую часть стремянки, будет равна ей по модулю, но противоположно направлена (рис. 1.38,6).
, действующая на правую часть стремянки, будет равна ей по модулю, но противоположно направлена (рис. 1.38,6).
Для левой части стремянки начало координат разместим в точке А, ось Ау направим вертикально вверх, ось Ах перпендикулярно ей вправо. Для левой части стремянки начало координат разместим в точке С, ось Су направим вертикально вверх, ось Сх перпендикулярно ей вправо (рис. 1.38,б).
Разложим силы B и на составляющие  ,
,  и
и  ,
,  , параллельные осям координат.
, параллельные осям координат.
Составим уравнения равновесия для левой части стремянки:
∑Fix= T –  = 0; ∑Fiу= NA – Q – P +
= 0; ∑Fiу= NA – Q – P +  = 0;
= 0;
∑ MA (Fi)= - Q  cos – T sin – P(l-L) cos + (1.46)
cos – T sin – P(l-L) cos + (1.46)
+ R'Blsin +R''Bl cos = 0.
Составим уравнения равновесия для правой части стремянки:
∑ Fix' = –T* +  = 0; ∑Fiу'= NС – Q – = 0;
= 0; ∑Fiу'= NС – Q – = 0;
∑ MС ()=Q cos +T* sina +  l cos - lsin = 0. (1.47)
l cos - lsin = 0. (1.47)
С учетом того, что
Т = Т*, = , = (1.48)
уравнения равновесия приобретут вид
T – RB' = 0; NA – Q – P + = 0;
-Q  cos – T sin – P(l-L) cos + lsin + l cos = 0;
cos – T sin – P(l-L) cos + lsin + l cos = 0;
- T + = 0; NC – Q - = 0; (1.49)
Q cos + T sin + l cos - l sin =0.
Первое и четвертое уравнения системы (1.49) идентичны, поэтому одно из них можно отбросить.
Решим оставшиеся уравнения. Для этого сложим третье и шестое уравнения, получим:
-Р(l - L)cos + 2 l cos = 0,
откуда
Подставляя найденное значение во второе и пятое уравнения, находим:
NA=Q + P - = 767H; NC = Q + = 433H.
Из первого уравнения следует, что
T = .
Учитывая это, из шестого уравнения найдем:
Т = = (Q + 2 ) · ctg = 442,26 Н.
Пример 1.8. Прямоугольная пластина весом Р=1000 Н прикреплена к вертикальной стене с помощью шарового шарнира А и цилиндрического шарнира В и удерживается в горизонтальном положении с помощью нити СЕ, прикрепленной к стене в точке Е на одной вертикали с точкой А (рис. 1.39,а). Определить реакции в шарнирах и натяжение нити, если угол между диагональю пластины и нитью = 60°, угол b между диагональю пластины и стороной CD равен 60°.
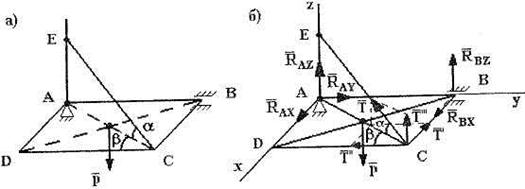
Рис. 1.39
В данной задаче активной силой является сила тяжести , направленная вертикально вниз и приложенная в центре тяжести пластины – на пересечении ее диагоналей. Выберем систему координат Аху, как показано на рис. 1.39,6. Направление реакции связи шарового шарнира А неизвестно, поэтому представим эту силу тремя составляющими Аx, Аy, Аz. Сила реакции в цилиндрическом шарнире лежит в плоскости, перпендикулярной оси шарнира, поэтому представим эту силу двумя составляющими Bx, Bz. Реакция нити направлена по нити от исследуемого тела (рис. 1.39,б).
Разложим силу на составляющие, параллельные осям координат, модули этих составляющих будут равны:
T"' = Т sin  ; T" = Tcos cosβ; T' = Tcos sinβ, (1.50)
; T" = Tcos cosβ; T' = Tcos sinβ, (1.50)
причем модули составляющих ' и " определим поэтапным проецированием силы Т сначала на плоскость пластины, а затем на оси
координат.
Мысленно отбросим связи и изобразим проекции пластины и действующих на нее сил на координатные плоскости (рис. 1.40).
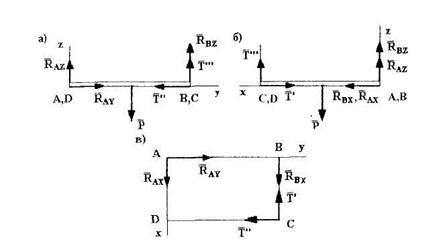
Рис. 1.40
Используя проекции (рис. 1.40), составим уравнения равновесия:
∑Fix= -T'+RBx + RAx= 0; ∑Fiy= RAy + -T''= 0;
∑Fiz= -P+RAz + T'''+ RBz = 0;
∑ Mx = - P  + T''' AB+RBz AB = 0; (1.51)
+ T''' AB+RBz AB = 0; (1.51)
∑ My = P  - T''' AD = 0; ∑ Mz = - RBx AB = 0;
- T''' AD = 0; ∑ Mz = - RBx AB = 0;
В уравнении моментов относительно оси Oz сила не фигурирует, так как ее линия действия пересекает эту ось.
С учетом (1.50) уравнения равновесия примут вид
-Tcosa . sinβ + RBx +RAx = 0; RAy –Tcos cosβ = 0;
-P + RAz + Tsin + RBz = 0; -P + Tsin .AB+RBz AB= 0
P -Tsin . AD= 0; - RBx AB =0.
Решая эти уравнения, получим
RBx = 0; T =  = 577,37H; RBz = - T sin = 0;
= 577,37H; RBz = - T sin = 0;
RAz = P - T sin = 500H; RAz = T cos · sinβ = 433H;
RAy = T cos · sinβ = 144,34H.
Пример 1.9. Прямоугольная крышка ABCD весом Р=100 Н удерживается под углом =30° к горизонту с помощью шарнирного стержня DE = AD, лежащего в вертикальной плоскости. Шарниры А, В, Е  расположены в плоскости горизонта. К плите приложена сила Q, направленная под углом β = 45° к горизонту, тоже лежащая в вертикальной плоскости (рис. 1.41,а). Найти реакции в шарнирах и в стержне, если Q = 50 Н.
расположены в плоскости горизонта. К плите приложена сила Q, направленная под углом β = 45° к горизонту, тоже лежащая в вертикальной плоскости (рис. 1.41,а). Найти реакции в шарнирах и в стержне, если Q = 50 Н.
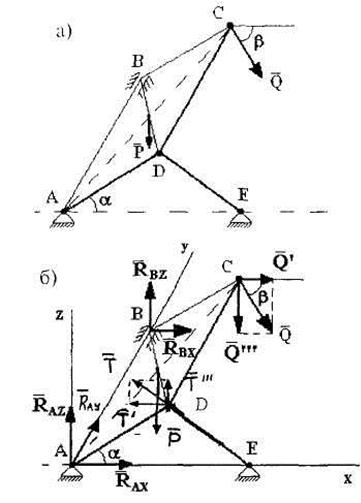
Рис. 1.41
Активными силами в данной задаче будут сила тяжести крышки , направленная вертикально вниз и приложенная к точке пересечения ее диагоналей, и сила .
Выберем систему координат Axyz, как показано на рис. 1.41,б.
Связи мысленно отбросим, их действие заменим реакциями связей. Сила реакции в шаровом шарнире А произвольно ориентирована в пространстве, поэтому зададим ее тремя взаимно перпендикулярными составляющими Ax, Ay, Az. Сила реакции в цилиндрическом шарнире В лежит в плоскости, перпендикулярной оси шарнира, поэтому зададим ее двумя взаимно перпендикулярными составляющими Bx, Bz. Силу реакции в шарнире D направим по стержню DE к телу, так как будем считать, что стержень работает на сжатие (рис. 1.41,б).
Разложим силы и на взаимно перпендикулярные составляющие, параллельные осям координат. Модули этих составляющих будут равны
T' = Tcos ; T''' = Tsin ;
(1.52)
Q' = Qcosβ; Q''' = Qsinβ.
Изобразим проекции крышки и действующих на нее сил на координатные плоскости (рис. 1.42).
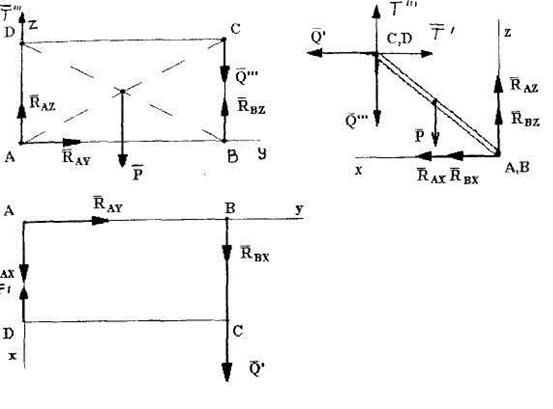
Рис. 1.42
Используя проекции (рис. 1.42), составим уравнения равновесия:
∑Fix=RAx + RBx-T' + Q' = 0;
∑Fiy=RAy= 0;
∑Fiz= RAz + RBz+T'''- Q''' -P = 0;
∑Mx = -P +RBz AB- Q''' AB = 0; (1.53)
∑My= P  cos + (Q''' - T''')BC cos + (Q' - T') BC sin = 0;
cos + (Q''' - T''')BC cos + (Q' - T') BC sin = 0;
∑ Mz= - RBx AB - Q' AB = 0.
С учетом (152) уравнения (1.53) примут вид
RAx + RBx - Tcos + Qcos β = 0; RAy =0;
RAz+RBz+T sin - Qsin β -P = 0;
- AB + RBz AB-AB-Q sinβ = 0;
BCcos + (Qsin β - T sin ) cos ·BC +
+ (Qcos β - Tcos )sin · BC = 0;
- RBx AB - Qcos β · AB = 0
Решая эти уравнения, найдем
RAy = 0; RBx = - Qcos β = - 35,36 H;

RBz= +Qsin β= 85,36 H; RAz = - RBz -Tsin + Qsin β +P = 11,06 H;
RAx= -RBx + Tcos - Qcos β = 67,45 H.
Пример 1.10. На вертикальной оси, закрепленной в подшипнике В и подпятнике А, закреплены барабан и диск, каждый весом Р=50 Н. Они находятся в равновесии под действием сил ,  , , лежащих в горизонтальных плоскостях, и вертикальной силы . Силы , и ,приложены к барабану и диску посредством нитей, намотанных на них. Направления осей координат считать заданными в соответствии с рис. 1.43,а. Силы , параллельны оси Ау, сила составляет с осью Ах угол
, , лежащих в горизонтальных плоскостях, и вертикальной силы . Силы , и ,приложены к барабану и диску посредством нитей, намотанных на них. Направления осей координат считать заданными в соответствии с рис. 1.43,а. Силы , параллельны оси Ау, сила составляет с осью Ах угол
= 30°. Определить реакции в подшипниках и модуль силы , если
а = с =0,25 м, b = 0,5 м, 2t = T=100 Н, Q = 50 Н, R = 0,5 м, r = 0,25 м. Активными силами в данной задаче являются силы , , , .
Сила реакции в подпятнике А произвольно ориентирована в пространстве, поэтому зададим ее тремя взаимно перпендикулярными составляющими Ax, Ay, Az. Сила реакции в цилиндрическом шарнире В произвольно ориентирована в плоскости, перпендикулярной оси вала, поэтому зададим эту реакцию двумя взаимно перпендикулярными составляющими Bx, By.
Разложим силу на две взаимно перпендикулярные составляющие ', ", параллельные осям координат Ах и Ау (рис. 1.43,б). Модули этих составляющих будут равны
Т'= Тcos ; Т''= Т sin . (1.54)
Мысленно отбросим связи и изобразим проекции исследуемого тела и действующих на него сил на координатные плоскости (рис. 1.44).
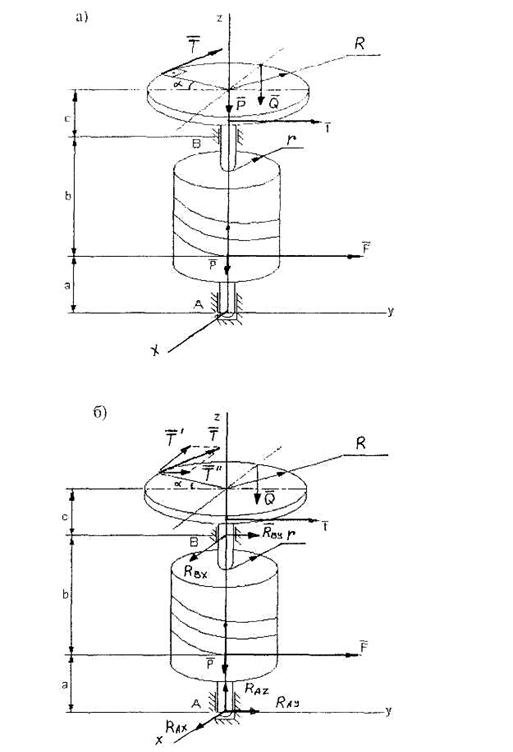
Рис. 1.43
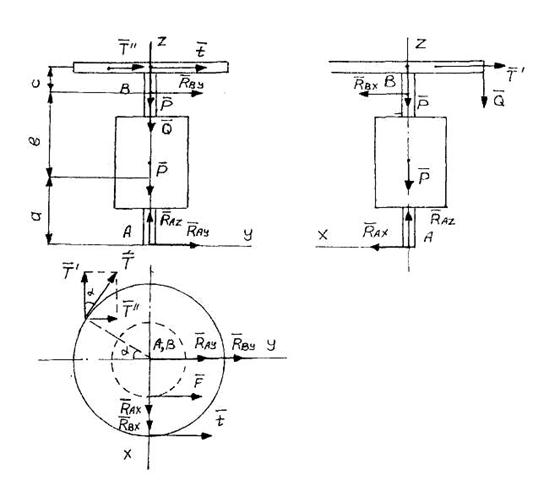
Рис. 1.44
Используя проекции (рис. 1.44), составим уравнения равновесия:
∑Fix=RAx + RBx - T' = 0;
∑Fiy=RAy+ RBy+ F + t + T''= 0;
∑Fiz= RAz - 2P - Q = 0;
∑ Mx= - Fa - RBy (a + b) – (t + T'')(a + b + c) = 0; (1.55)
∑ My= RBx (a + b) – T'(a + b + c) - QR = 0;
∑ Mz= tR + Fr - TR = 0;
С учетом (1.54) уравнения (1.55) приобретут вид
RAx + RBx - Tcos = 0; RAy+ RBy+ F + t + T sin = 0;
RAz - 2P - Q = 0;
- Fa - RBy (a + b) – (t + T sin )(a + b + c) = 0; (1.56)
RBx (a + b) – Tcos (a + b + c) - QR = 0; tR + Fr - TR = 0.
Решая уравнения (1.56), получим