 2015-05-12
2015-05-12 2560
2560Требования, предъявляемые к САР:
1. Требование к ошибке в установившемся режиме(статическая точность)
2. Требования к ошибкам САР при наличии меняющихся воздействий(ошибки определяют динамическую точность системы)
3. Требования к запасу устойчивости САР
4. Требования к качеству САР в переходном режиме
Дифференциальное уравнение САР при наличии входного воздействия

Решение дифференциального уравнения:

 -соответствует переходному процессу
-соответствует переходному процессу
 -определяется при наличии управляющего сигнала
-определяется при наличии управляющего сигнала
Установившаяся часть процесса управления:
Это частное решение с учетом задающих воздействий и их производных при  (см. Рис.8.1).
(см. Рис.8.1).
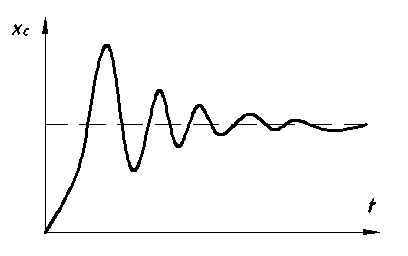
Рис.8.1
Собственное решение ДУ САР:
Если нет кратных корней характеристического уравнения, то собственное решение:
 -коэффициент, зависящий от начальных условий
-коэффициент, зависящий от начальных условий
 -i корень характеристического уравнения
-i корень характеристического уравнения
Собственное решение, если есть кратные корни:
 -многочлен степени
-многочлен степени 
 -количество кратных корней
-количество кратных корней
k-количество разных корней
Ошибка САР:
 -динамическая ошибка
-динамическая ошибка
Установившаяся ошибка определяется при :
 -статическая ошибка(определяется свойствами системы)
-статическая ошибка(определяется свойствами системы)

Примечание: чаще всего динамическая ошибка определяется при гармоническом входном сигнале на рабочих частотах.
Статические и астатические системы.
САР называют статической по отношению к управляющему воздействию, если при наличии управляющего воздействия, стремящегося к постоянной величине, ошибка также стремится к постоянной величине, зависящей от входного сигнала.
При  ,
,  ,
,  зависит от
зависит от 
САР называют астатической, если входящий сигнал стремится к постоянной величине, а ошибка стремится к нулю вне зависимости от величины входного сигнала.
Аналогичное определение можно дать и по возмущающему воздействию.
САР может быть статической по управляющему воздействию и астатической по возмущающему воздействию.
Рассмотрим астатическую систему ( ). Если система имеет передаточную функцию
). Если система имеет передаточную функцию  , то для этого случая передаточная функция по ошибке равна:
, то для этого случая передаточная функция по ошибке равна:

ДУ по ошибке:

Установившаяся ошибка:
 , где:
, где:

Такой же результат получается, если ДУ по ошибке решить для случая 
►Случай 1. На вход подается линейный сигнал:

Если в статической системе на вход подать такой сигнал, то и ошибка будет расти. В целях минимизации ошибки берется  . Полином
. Полином  имеет свободный член, равный единице. При этом
имеет свободный член, равный единице. При этом  должна иметь нулевой полюс
должна иметь нулевой полюс
 - изображение передаточной функции по возмущающему воздействию по Лапласу
- изображение передаточной функции по возмущающему воздействию по Лапласу
 - ошибка по скорости
- ошибка по скорости
Если в ДУ по ошибке  имеет в чистом виде S, то можно получить частное решение для случая:
имеет в чистом виде S, то можно получить частное решение для случая:

Такая система называется астатической системой первого порядка. При поступлении постоянного сигнала в астатическую систему ошибка будет равна нулю.
►Случай 2. На вход подается полином степени m:


Установившаяся ошибка:
►Cлучай 3. g(t)-произвольная функция.


Установившаяся ошибка:

 -коэффициенты по ошибке, которые вычисляются по следующим формулам:
-коэффициенты по ошибке, которые вычисляются по следующим формулам:

Передаточная функция по ошибке представляет собой дробно-рациональную функцию. Она дифференцируема, поэтому можно вычислять коэффициенты по ошибке по данным формулам.








